ел
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| АППАРАТ ДЛЯ ОБРАБОТКИ БУМАЖНЫХ ЛИСТОВ | 2013 |
|
RU2541644C2 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| СТАНОК ДЛЯ ЗАКАЛКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1973 |
|
SU382698A1 |
| Промышленный робот | 1987 |
|
SU1481056A1 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |
| Станок для индукционной закалки изделий | 1984 |
|
SU1392116A1 |
| Магазинный накопитель | 1986 |
|
SU1366356A1 |
Изобретение относится к машиностроению и может быть использовано при создании транспортно-накопительных систем гибкого производства. Целью изобретения является повышение производительности. Накопитель включает основание 1, на котором жестко закреплены вертикальные направляющие 2 и 3. На последних установлены с возможностью перемещения по ним кольцевые направляющие 6 и 7, а также каркас 29 с ячейками 30 под тару с деталями. На кольцевых направляющих 6 и 7 размещены каретки с захватами. Каретка 9 имеет захват, выполненный в виде стола. При работе накопителя каркас 29 может сменяться посредством внешнего загрузочного устройства. Кольцевые направляющие, перемещаясь по вертикальным направляющим, осуществляют ориентацию захватов, размещенных на каретках относительно ячеек 30 по вертикали. Каретки, перемещаясь в кольцевых направляющих, ориентируют захваты относительно ячеек 30 по окружности. 6 ил.
оо
Изобретение относится к машиностроению и может быть использовано при создании транспортно-накопителъ- ных систем гибкого производства.
Цель изобретения - повышение производительности .
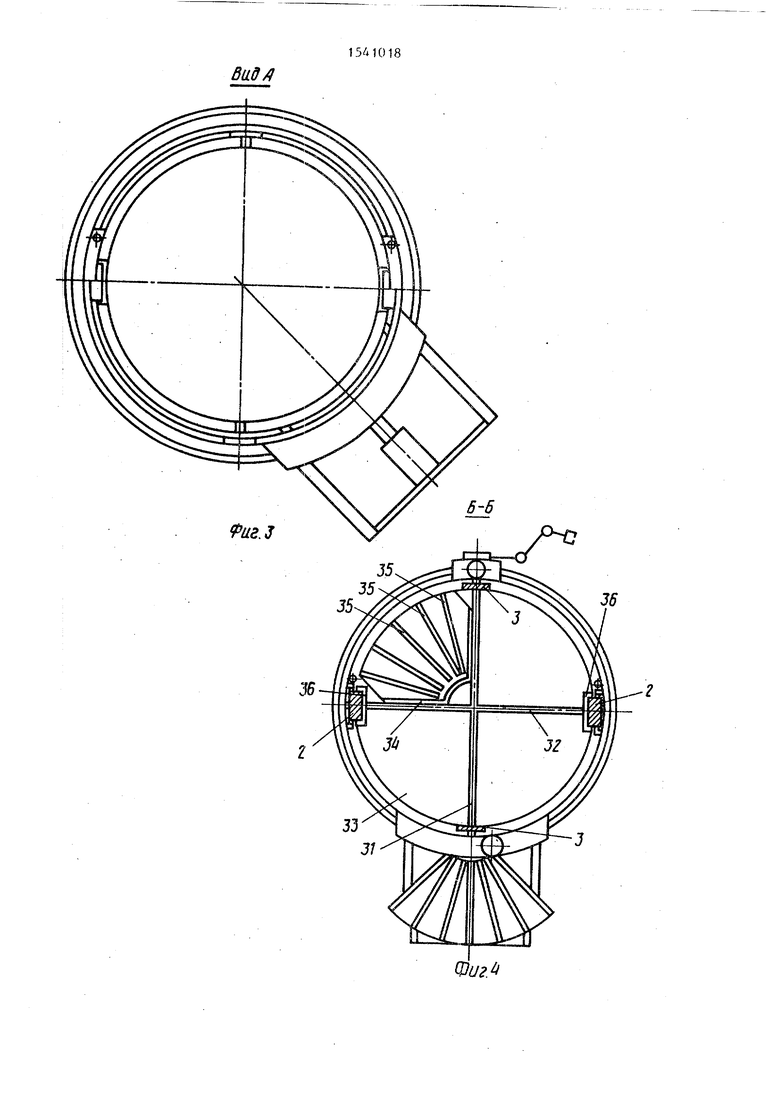
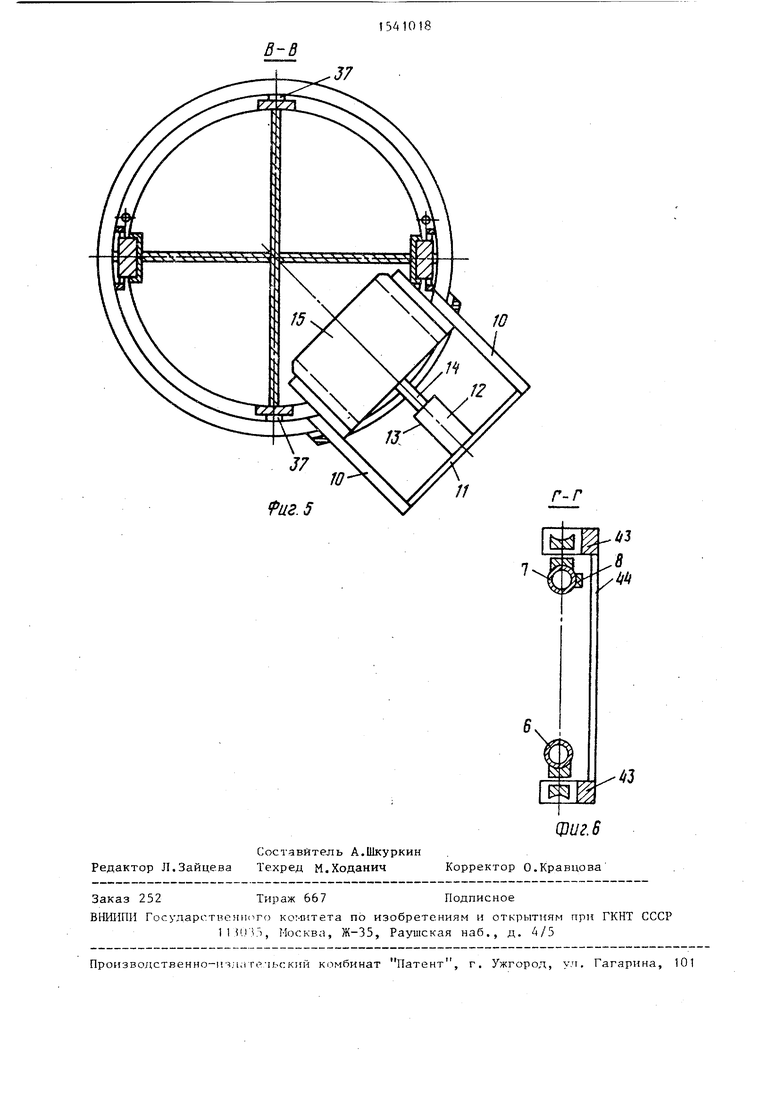
На фиг.1 представлен накопитель, общий вид; на фиг.2 - кинематическая схема накопителя; на фиг.З - вид А на фиг.1; на фиг.А - разрез Б-Б на фиг.1; на фиг.5 - разрез Б-В на фиг. фиг. 1; на фиг. 6 - разрез Г-Г на фиг. 1.
Накопитель содержит основание 1, вертикальные направляющие 2 и 3, шайбу 4 .Направляющие 2 и 3 жестко связаны с основанием I и шайбой 4, на направляющих 2 установлены каретки 5, на обоих торцах которых закреплены кольцевые направляющие 6 и 7, На внутреннем венце кольцевой направляющей 7 установлено зубчатое колесо 8. На кольцевых направляющих 6 и 7 установлена каретка 9, на которой установлены скалки 10, одни концы которых связаны стяжкой 11. Со стяжкой 11 связан корпус 12 силового цилиндра 13, шток 14 которого связан с захватом, выполненным в виде стола 15, на котором установлены танкетки 16, а на скалках 10 - танкетки 17. На каретке 9 установлен привод 18, выходная шестерня 19 которого находится в зацеплении с зубчатым колесом 8. На направляющих b и 7 установлена каретка 10 с приводом 21, выходная шестерня 22 которого находится в зацеплении с зубчатым колесом 8, на каретке 20 установлена рука 23 со охватом 24. На направляющих 2 установлены шариковин- товые пары 2.5, винты 26 установлены в подшипниках 27, а гайки 28 закреплены в каретках 5,- В направляющих 2 и 3 установлен каркас 29 с ячейками 30, образованными диаметральными ребрами 31 и 32 и плоскими шайбами 33, внутри ячеек 30 установлены контейнеры 34 с уложенными в них деталями 35, снаружи каркаса 29 диаметрально противоположно закреплены салазки 36, установленные на направляющих 2. В кольцевых направляющих 6 и 7 установлены ролики 37, контпкгиоующие с направляющими 3, На вингпч .( установлены зубчатые колеса 48, находящиеся в зацеплении с чуЬч ггыми колесами 39, ус
5
0
5
0
5
0
5
0
5
тановленными на промежуточном валу 40, связанном посредством зубчато-ременной передачи 41 с приводом 42. Каретка 9 образована двумя поперечинами 43 и стойками 44, с которыми связаны скалки 10.
Накопитель работает следующим образом.
При помощи грузоподъемного устройства, например крана, каркас 29 вместе с установленными в его ячейках контейнерами 34 перемещается вверх, при этом салазки 36 скользят по направляющим 2. Подъем про- из водят до тех пор, пока каркас 29 не окажется над шайбой 4, после этого он переносится на участок комплектации, где пустые контейнера 34 заменяются на полные, с уложенными в них деталями. Каркас 29 с полными контейнерами 34 грузоподъемным устройством переносится к накопителю и устанавливается в него, при этом салазки 36 заходят на направляющие 2. Стол 15 в процессе работы вынимает пустые контейнеры 34 из ячеек 30, опускает их, устанавливает на транспортную тележку, снимает с транспортной тележки полный контейнер 34 и устанавливает его „в ячейку 30. Стол 15 вынимает из ячеек 30 контейнеры 34 с деталями 35 и располагает их около технологического оборудования, а пустые контейнеры устанавливает в ячейки 30 каркаса 29.
При помощи руки 23 со схватом 24 производится съем деталей 35 с контейнеров 34 и установка их в технологическое оборудование или оснастку. При этрм съем деталей 35 может производиться как из контейнеров 34, установленных в ячейках 30, так и из контенеров 34, установленных на столе 15.
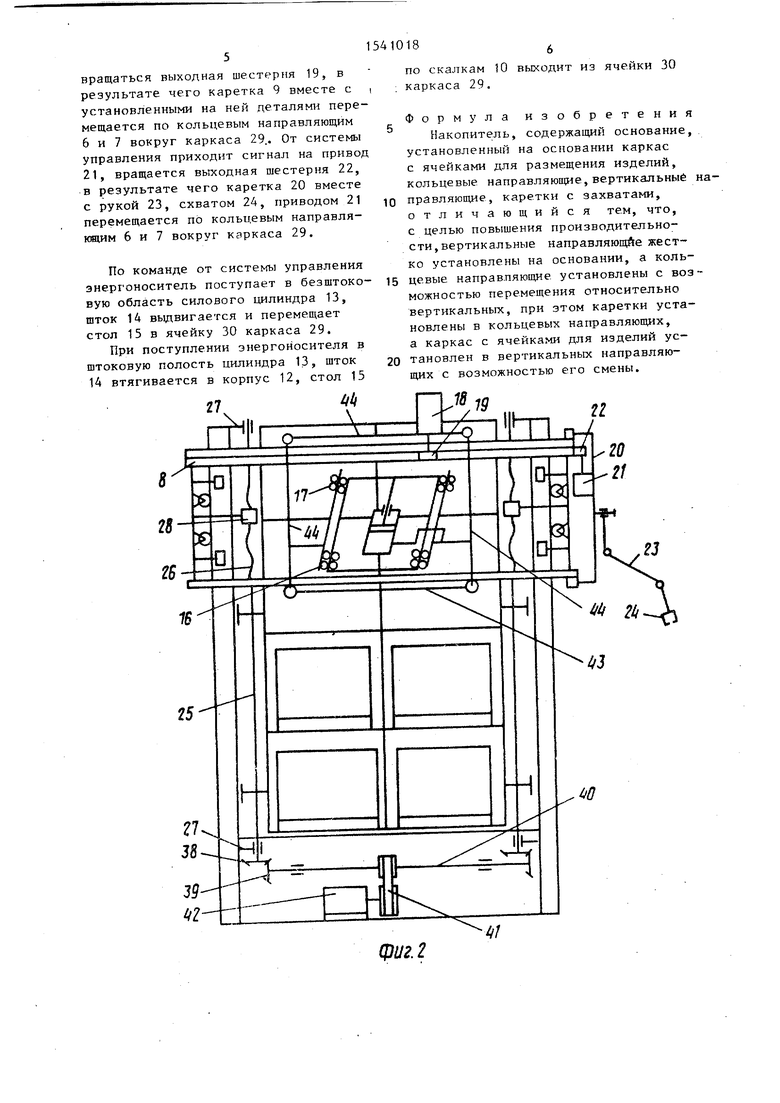
От системы управления приходит сигнал на привод 42,, выходной вал которого начинает вращаться и через зубчато-ременную передачу приводит во вращение промежуточный вал 40 с зубчатыми колесами 39, последние сообщают вращение зубчатым колесам 38 и винтам 25, в результате чего гайки 28 вместе с каретками 5, 9 и 10, направляющими 6 и 7, рукой 23 перемещаются в вертикальном направлении. От системы управления приходит сигнал на привод 18, начинает
вращаться выходная шестерня 19, в результате чего каретка 9 вместе с установленными на ней деталями перемещается по кольцевым направляющим 6 и 7 вокруг каркаса 29.. От системы управления приходит сигнал на привод 21, вращается выходная шестерня 22, в результате чего каретка 20 вместе с рукой 23, схватом 24, приводом 21 перемещается по кольиевым направляющим 6 и 7 вокруг каркаса 29.
По команде от системы управления энергоноситель поступает в безштоко- вую область силового цилиндра 13, шток 14 выдвигается и перемещает стол 15 в ячейку 30 каркаса 29.
При поступлении энергоносителя в штоковую полость цилиндра 13, шток 14 втягивается в корпус 12, стол 15
27
0
по скалкам 10 выходит из ячейки 30 каркаса 29.
Формула изобретения Накопитель, содержащий основание, установленный на основании каркас с ячейками для размещения изделий, кольцевые направляющие,вертикальные направляющие, каретки с захватами, отличающийся тем, что, с целью повышения производительности, вертикальные направляющие жестко установлены на основании, а коль- 5 цевые направляющие установлены с возможностью перемещения относительно вертикальных, при этом каретки установлены в кольцевых направляющих, а каркас с ячейками для изделий установлен в вертикальных направляю0
щих с возможностью его смены.
18
21
фиг. 2
9Ј
Рвя9
8ЮИ51
Фиг. 5
Редактор Л.Зайцева
Составитель А.Шкуркин Техред М.Ходанич
11
г-г
Фиг. 6
Корректор О.Кравцова
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПОДЛОЖКОДЕРЖАТЕЛЯ | 1997 |
|
RU2115764C1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
