Изобре1ение относится к машиностроению и может быть использовано в системе управления длиннобазным многозвенным транспортным средством.
Целью изобретения является улучшение управляемости путем расхождения траекторий звеньев при его криволинейном движении
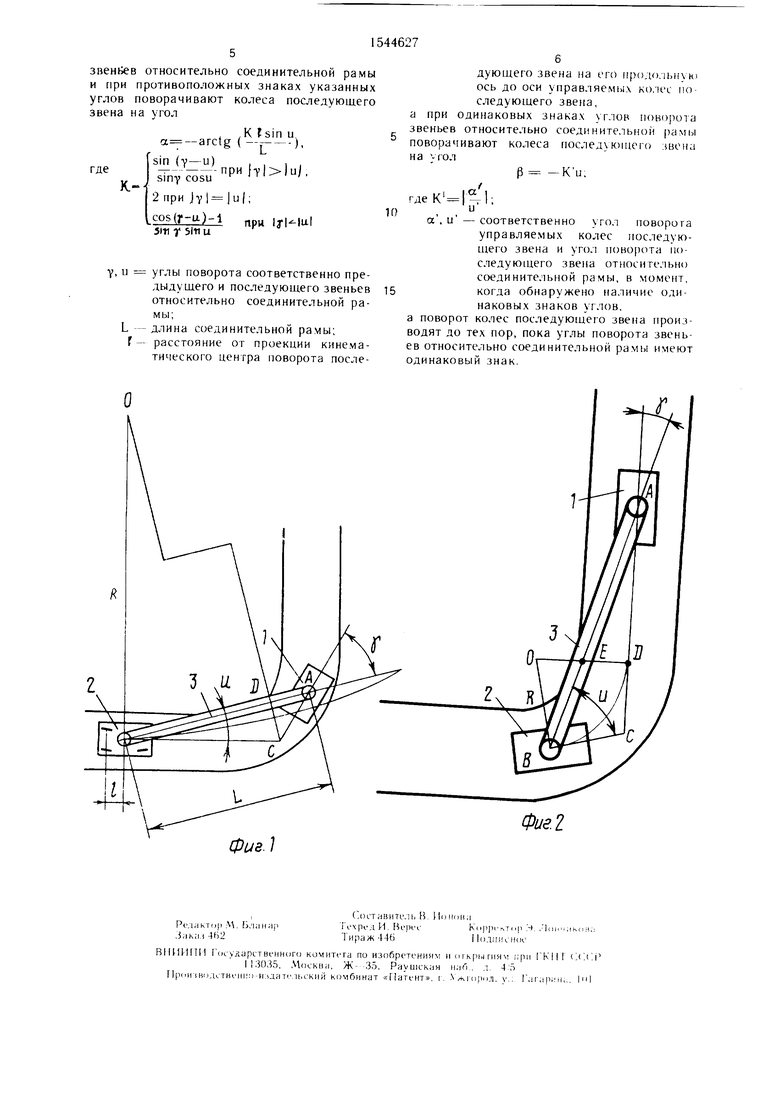
На фиг. 1 показано транспортное средство на входе в поворот, общий вид, на фиг. 2-го же, на выходе из поворота.
Транспортное средство содержит предыдущее звено 1, последующее звено 2 и соеди нительн ю рам 3 Принтом) иол поворота звена 1 относительно рамы 3, и - угол поворота звена 2 относительно рамы 3, L - длина рамы 3 (расстояние между шарнирами крепления рамы 3 к звеньям 1 и 2), О - кинематич еский центр поворота звена 2, F - расстояние от проекции кинематического центра поворота О на продольную ось звена 2 до оси управляемых колес звена 2.
Управление по способ) осуществляют следующим образом.
Измеряют и сравнивают значения г- лов у и и (фиг. 1 и 2). поворота звеньев относительно соединительной рамы по величине и знаку и при наличии противоположного знака углов v и u поворачивают колеса звена 2 на угол
a -arctd(1 rlin-u),
smJY-) при|у| |и|; sin -у cosu к
2 при |
.4L-l npnUKJuJ, Lsm у sin uK
а при наличии одного знака углов у и u определяют и запоминают коэффициент К1
где
сл
Јь Јь О ND 1
к Ј1.
где а ни соответственно угол поворота управляемых колес звена 2 и угол поворота звена 2 относительно рамы 3, при которых перестало выполняться условие наличия противоположного зна ка углов поворота звеньев 1 и 2 относительно рамы 3.
и осуществляют поворот под раму звена 2, поворачивая колеса звена 2 на угол р - К и до тех пор, пока опять не выполняется условие наличия противоположного знака углов поворота звеньев 1 и 2 относительно рамы 3.
Устройство для осуществления управления по предлагаемое 7 способу состоит из датчиков угловых перемещений, замеряющих углы Y и и, блока сравнения, вычислительного блока и исполнительного механизма поворота управляемых колес звена 2.
Устройство работает следующим образом.
Сигналы, соответствующие величине и знаку углов у и и, подают на входы блока сравнения и вычислительного блока. В блоке сравнения сигналы датчиков сравнивают по знаку и величине и подают информацию о сравнении на вход вычислительного блока, где в зависимости от данной информации определяют требуемый угол поворота колес звена 2. Сигнал, соответствующий углу поворота колес звена 2 подают на исполнительный механизм поворота управляемых колес звена 2
При входе транспортного средства в но ворот ( фиг 1)
sin u;
Cn-BD.KU-R jn ;
. BD l.-R sin u;
CD AD
sin Y p sin Y eos u cos Ycos Y
siir u sin Y n SU1 V °os u
К- L J - К J - 1
co u cos Ycos Y
S 1ПУ SI FlUCOSU
sinjf с os ,y
R
S LTIJ COSU
s i nu s i n ( у + u )
причем величины углов Y и u взяты по абсолютной величине. С учетом знаков
R
L sin Y cos u sin LI sin(Y u)
При выходе транспортного средства из поворота (фиг. 2)
I. sin u 1. sin u
sm f8() -V) sin (Y + U)
L sin/ sin( +
u)
CB CD;
AD AC-CB;
A p L(si пи- sury)
sin (Y + U)
AD L(sin u-sin Y)
COSY COSY sin (Y + U)
RF Rsm (YJ-UJ (Y+u) .
sin (90° -Y)COSY
AE+BE L;
- i sinJJir5irU 4-R
cos Y sin (Y + U)cos Y
R kcos Y .
sin (Y + U)
sin u - sm Y
1 cos Y sin (Y+U)
L COSY sin (Y + U) +sinY j in u + u)
L(sinYcosYcosn+cosJYsinu + sinY-sinu)
1 - cosr(Y + u)
siiiY(cosYCosu+ 1) +sinu (COS JY- )
l--cros7(7+u)
L
siriYfcosYcosu - sinysinu + l) T +cosr(YTu Г T1 -COSIY + u)
5
5
0
0
- - у
0
L sin Y 1 -cos (Y + U)
причем величины углов Y и u взяты по абсолютной величине. С учетом знаков
R ..
cos (Y - u) - Г
По известной величине R угол
р
a arctg (-).
Устройство для осуществления управления по предлагаемому способу может быть создано на базе существующих микроЭВМ.
Формула изобретения
Способ управления длиннобазным многозвенным транспортным средством, состоящим из двух шарнирно связанных соединительной рамой звеньев с управляемыми колесами, заключающийся в том, что измеряют по величине углы поворота звеньев относительно соединительной рамы и поворачивают колеса последующего звена пропорционально углу поворота последующего звена относительно соединительной рамы, отличающийся тем, что, с целью улучшения управляемости транспортного средства путем уменьшения расхождения траекторий звеньев при его криволинейном движении, сравнивают между собой по знаку углы поворота
звенйев относительно соединительной рамы и при противоположных знаках указанных углов поворачивают колеса последующего звена на угол
К sin u, а -arctg ( - j-),
sin (7-u) . , .
где-при f-y uj,
siny cosu
2 при Jv |u|;
.cosfr-u)- при „| 5m
|ul
V, u углы поворота соответственно предыдущего и последующего звеньев относительно соединительной рамы;
L -длина соединительной рамы; Г- расстояние от проекции кинематического центра поворота лосле
дующего звена на его продольною ось до оси управляемых колес последующего звена,
а при одинаковых знаках углов поворота звеньев относительно соединительной рамы поворачивают колеса последующего .шона на -гол
р -К и,
гдеК К|;
и
а
и - соответственно угол поворота управляемых колес последующего звена и угол поворота последующего звена относительно соединительной рамы, в момент, когда обнаружено наличие одинаковых знаков углов,
а поворот колес последующего звена производят до тех пор, пока углы поворота звеньев относительно соединительной рамы имеют одинаковый знак.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| Зубчатая передача | 1987 |
|
SU1537930A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| Способ управления задними колесами транспортного звена | 1982 |
|
SU1034939A1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| Способ заготовки деревьев | 1989 |
|
SU1664186A1 |
| Функциональный преобразователь угла поворота в цифровой код | 1974 |
|
SU506890A1 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
Изобретение относится к машиностроению и может быть использовано в системе управления длиннобазным многозвенным транспортным средством. Цель изобретения - улучшение управляемости транспортного средства путем уменьшения расхождения траекторий звеньев при его криволинейном движении. Сначала измеряют и сравнивают значения углов поворота тележек звеньев 1 и 2 по величине и знаку и при наличии противоположного знака углов поворачивают колеса звена 2 на угол α, а при наличии одного знака углов поворота тележек звеньев 1 и 2 дополнительно определяют отношение угла поворота колес звена 2 к углу поворота тележки звена 2 относительно рамы 3, и поворачивают колеса звена 2 на угол β, который обеспечивает выполнение условия наличия противоположного знака углов поворота тележек звеньев 1 и 2 относительно рамы 3. 2 ил.
R
Фиг 2
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИПРИЦЕПА | 1972 |
|
SU431052A1 |
