Изобретение относится к средствам программного управления и может быть использовано в системах управления механизированными накопительными устройствами (конвейерами, транспортерами, стеллажами) с замкнутым контуром движения для оптимального поиска грузов требуемой номенклатуры (вида, сорта).
Цель изобретения - расширение области применения за счет реализации вызова по номенклатуре грузов.
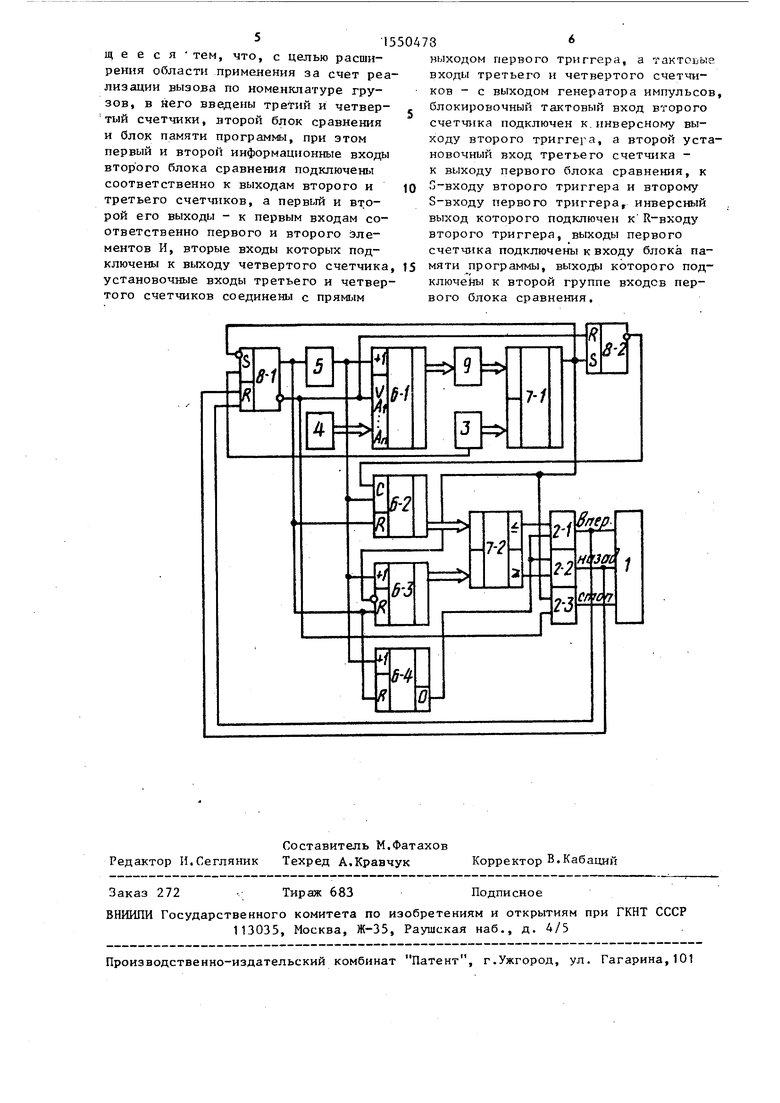
На чертеже приведена структурная функциональная схема устройства программного управления перемещением объекта по замкнутому контуру.
Устройство включает блок управления приводом 1; элементы И 2-1, 2-2, 2-3; блок вызова 3; датчик положения 4; генератор импульсов 5; счетчики 6-1; 6-2; 6-3; 6-4; блоки сравнения 7-1, 7-2;. триггеры 8-1, 8-2; блок памяти программы 9.
Устройство работает следующим образом.
В исходном состоянии, до подачи команды вызова груза требуемого вида, триггеры 8-1, 8-2, счетчики 6-2, 6-3. 6-4 - в нулевом состоянии, генератор импульсов 5 отключен, состояние счетчика 6-1 однозначно повторяет код номера ячейки, находящейся на линии выдачи, т.е. выходной сигнал датчика положения 4. Определение направления движения груза требуемого вида по кратчайшему пути к линии выдачи начинается с момента подачи импульс а с выхода блока вызова 3 на S-вход
триггера 8-1. При этом код на выходах блока вызова 3, соединенных со входами блока сравнения 7-1, соответствует виду вызываемого груза. Если груз требуемого вида находится на линии выдачи, то на выходе блока сравнения 7-1, будет присутствовать 1, что соответствует равенству кодов на входах блока сравнения 7-1, и на второй S-вход триггера 8-1 поступает сигнал, запрещающий переход в единич- ное состояние. Если груза требуемого вида на линии выдачи нет, то триггер 8-1 переключится в единичное состояние. В результате этого запускается генератор импульсов 5, информационные входы счетчика 6-1 отключаются от выходов датчика положения 4 и начинается построчный опрос блока памяти программы 9. В каждой строке блока памяти программы 9, соответствующей ячейке транспортера-накопителя, записан (при загрузке транспортера-накопителя) код вида находящегося в ней груза.
Опрос блока памяти программы 9 начинается с 1-й строки, соответствующей номеру ячейки на линии выдачи. Одновременно с этим разрешается изменение состояния счетчиков 6-2, 6-3, 6-4. Пусть грузы требуемого вида находятся только в К-й и Р-й ячейках, причем и + 1, где N - количество ячеек в транспортере-накопителе. Тогда на линию выдачи должна быть перемещена К-ячейка, что соответствует подаче на блок управления приводом 1 команды Вперед. Обеспечивается это следующим образом. После того, как на выходе счетчика 6-1 появится код, соответствующий k-и ячейке, на выходе блока сравнения 7-1 появится 1,
В результате этого триггер 8-2 переключится в единичное состояние, будет запрещено дальнейшее переключение счетчика 6-2, а счетчик 6-3 установится в исходное нулевое состояние. С появлением на выходе счетчика 6-1 кода, соответствующего р -и ячейке, счетчик 6-3 вновь обнулится.
С приходом N-импульсов с начала цикла на выходе счетчика 6-1 вновь появится код i-й ячейки, счетчик 6-2 будет находиться в состоянии k-i, счетчик 6-3 - в состоянии N - р + i, а счетчик 6-4 в нулевом состоянии, что приведет к появлению 1 на выхо0
5
0
5
0
5
0
5
0
5
де элемента И 2-1 и на блок управления приводом 1 будет подан сигнал Вперед. Если бы К ячейка находилась на большем расстоянии от линии выдачи, чем р, то количество импульсов, изменявших состояние счетчика 6-2, а, следовательно, и код на его выходах, были бы большими, чем количество импульсов, поступивших после последнего обнуления, на счетчик 6-3. Тогда 1м появилась бы на выходе элемента И 2-2, что соответствовало бы сигналу Назад, С появлением 1 на выходах элементов И 2-1 и 2-2 начинается перемещение груза требуемого вида на линию выдачи, триггер 8-1 обнуляется и состояние счетчика вновь начинает повторять код на выходе датчика положения 4. Когда на линию выдачи будет подана ячейка с грузом требуемого вида на выходе блока сравнения, а следовательно, и на выходе элемента И 2-3 появится 1 и на блок управления приводом 1 будет подана команда Стоп. При загрузке транспортера-накопителя с блока вызова подается код, соответствующий отсутствующему грузу, и на линию выдачи будут передвигаться ближайшие пустые ячейки. Формула изобретения
Устройство для программного управления перемещением объекта по замкнутому контуру, содержащее блок управления приводом, входы которого соединены с выходами первого - третьего элементов И, блок вызова, датчик положения, генератор импульсов, два счетчика, блок сравнения, два триггера, прямой выход первого из которых соединен с входом генератора импульсов и установочным входом второго счетчика, а инверсный - с установочным входом первого счетчика и с первым входом третьего элемента И, выход генератора импульсов подключен к тактовым входам первого и второго счетчиков, информационные входы первого счетчика подключены к выходам датчика положения, управляющий выход блока вызова подключен к первому S-входу первого триггера, а информационные выходы блока вызова - к первой группе информационных входов блока сравнения, выход которого подключен к второму входу третьего элемента И, выходы первого- и второго элементов И подключены соответственно к первому и второму R-вхо- дам первого триггера, о т л и ч .а ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления перемещением груза по замкнутому контуру | 1989 |
|
SU1721588A1 |
| Устройство для программного управления перемещением объекта по замкнутому контуру | 1988 |
|
SU1620991A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Узел управления в сортирующих устройствах | 1983 |
|
SU1125070A2 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Устройство для программного управления | 1990 |
|
SU1716482A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Система для управления экскаваторно-автомобильным комплексом | 1989 |
|
SU1647598A1 |
| Устройство для обнаружения поврежденного участка телеграфного тракта | 1981 |
|
SU1042194A2 |
| Устройство для функционального контроля цифровых блоков | 1989 |
|
SU1656538A1 |
Изобретение относится к средствам програмного управления и может быть использовано в системах управления механизированными накопительными устройствами с замкнутым контуром движения. Цель изобретения - расширение области применения за счет реализации вызова по номенклатуре грузов. Устройство содержит блок управления приводом, три элемента И, блок вызова, датчик положения, генератор импульсов, четыре счетчика, два блока сравнения, два триггера, блок памяти программы. Изобретение обеспечивает высокий уровень автоматизации управления процессами транспортирования грузов и позволяет осуществлять подачу грузов требуемого вида по кратчайшему пути к линии выдачи. 1 ил.
| Устройство для выбора наименьшего угла поворота вращающегося узла станка | 1976 |
|
SU643837A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления положением приводного механизма | 1985 |
|
SU1314311A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного реверса движения люлечного конвейера | 1981 |
|
SU1008112A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
