XI
го
СП 00 00
Изобретение относится к средствам программного управления и может быть использовано в системах управления механизированными накопительными устройствами (конвейерами, транспортерами, стеллажами) с замкнутым контуром движения для оптимального поиска грузов требуемой номенклатуры (вида, сорта).
Известен ряд устройств, содержащих датчик положения, блок ввода, сумматор, блок сравнения и логический блок, обеспечивающие выбор кратчайшего направления движения по замкнутому контуру к заданному адресу.
Недостатком этих устройств является то, что они сложны при низких функциональных возможностях.
Известно устройство, содержащее блок управления приводом, входы которого соединены с выходами трех элементов И. блок вызова, датчик положения, генератор импульсов, два счетчика импульсов, блок сравнения, два триггера, прямой вход первого из которых соединен с входом генератора импульсов и установочным входом второго счетчика импульсов, а инверсный - с установочным входом первого счетчика импульсов и первым входом третьего элемента И, выход генератора импульсов подключен к текстовым входам счетчиков импульсов, информационные входы первого из которых соединены с выходами датчика положения, один, из выходов блока вызова подключен к S-входу первого триггера, а остальные - к первой группе входов блока сравнения, выход которого соединен с вторым входом третьего элемента И, выходы первого и второго элементов И подключены к R-входам первого триггера.
Недостатком известного устройства являются низкие функциональные возможности. Оно обеспечивает доставку к линии разгрузки ячейки транспортного механизма с требуемым адресом, при этом производится движение по кратчайшему пути. Однако при организации управления механизированными накопителями штучных грузов либо контейнеров с веществами определенного вида возникает более сложная функциональная задача: требуется подавать по кратчайшему пути на линию разгрузки ячейки не с заданным адресом, а с необходимым видом груза.
Известно устройство, содержащее блок управления приводом, входы которого соединены с выходами трех элементов И. блок вызова, датчик положения, генератор импульсов, четыре счетчика импульсов, блок сравнения, триггер, блок памяти кодов груза.
Недостатком устройства является его сложность.
Цель изобретения - упрощение устройства.
Указанная цель достигается тем, что в
устройстве для программного управления перемещением груза по замкнутому контуру, содержащем блок управления приводом, входы которого соединены с выходами трех
0 элементов И, блок вызова, датчик положения, генератор импульсов, три счетчика импульсов, блок сравнения, триггер, блок памяти кодов груза, к входам которого подключены выходы первого счетчика импуль5 са, выходы блока памяти кодов груза - к первой группе входов блока сравнения, прямой выход триггера соединен с входом генератора импульсов и первыми установочными входами второго и третьего счет0 чиков импульсов, а инверсный - .с установочным входом первого счетчика импульсов и первым входом третьего элемента И, выход генератора импульсов подключен к тактовым входам первого, второго и треть5 его счетчиков импульсов, информационные входы первого из которых соединены с выходами датчика положения, выход Вызов блока вызова подключен к первому R-входу триггера, а выход Код груза - к второй
0 группе входов блока сравнения, выход которого соединен с вторым входом третьего элемента И, вторым S-входом триггера и вторым установочным входом счетчика импульсов, выходы первого и второго элемен5 тов И подключены к R-входам триггера, выход старшего разряда третьего счетчика импульсов соединен с первыми входами первого и второго элементов И, с третьим установочным входом и входом реверса вто0 рого счетчика импульсов, прямой и инверсный выходы которого соединены с вторыми входами соответственно первого и второго элементов И, третьи входы которых подключены к выходу блока сравнения.
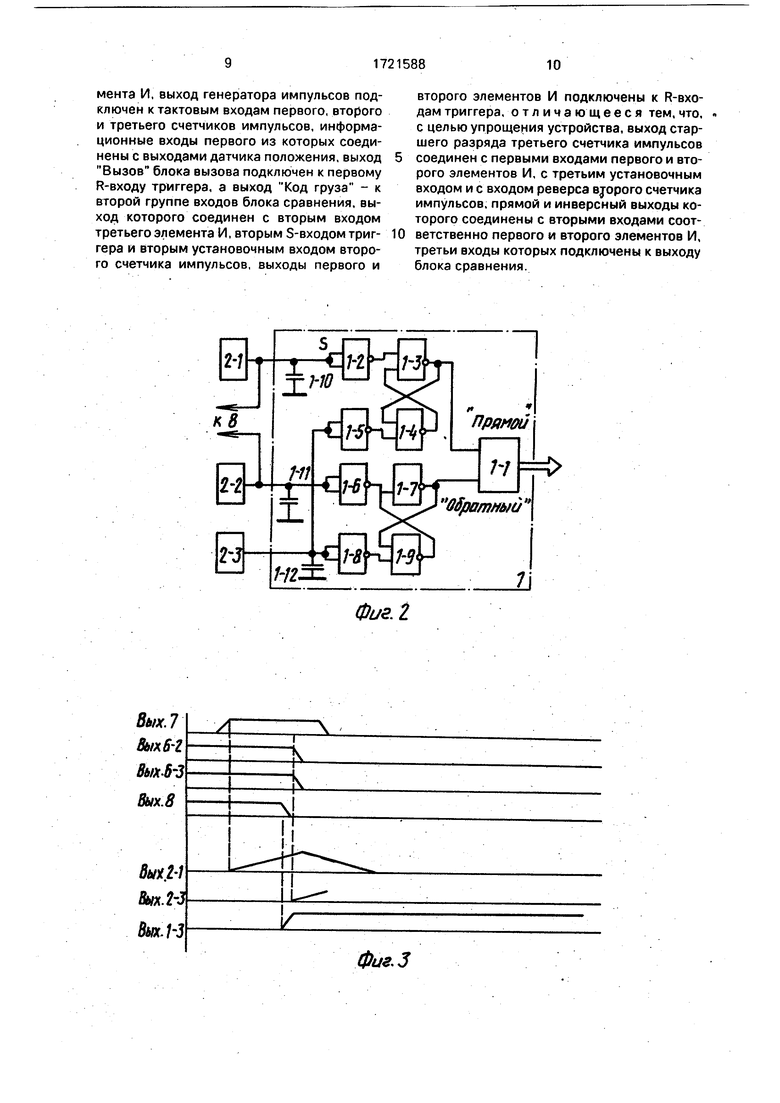
5 На фиг. 1 приведена структурная функциональная схема устройства для программного управления перемещением объекта по замкнутому контуру; на фиг. 2 - схема блока управления приводом; на фиг. 3 0 временные диаграммы работы выходного
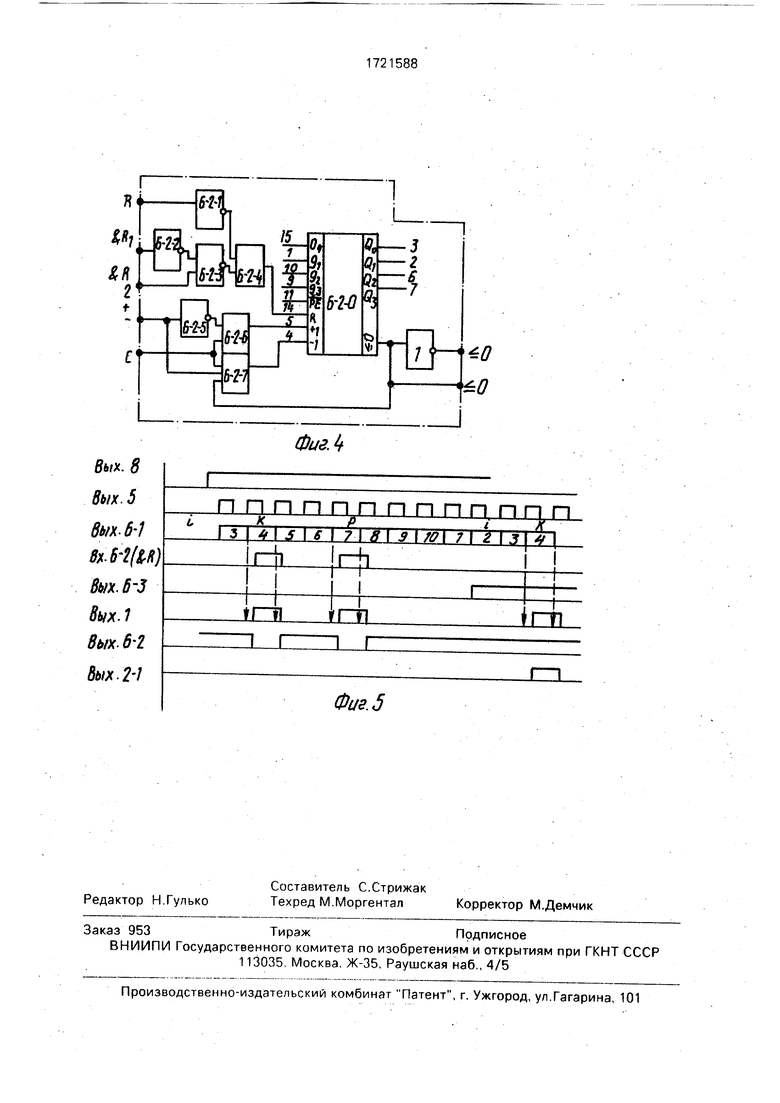
каскада устройства; на фиг. 4 - вариант
схемной реализации счетчика; на фиг. 5 временная диаграмма работы устройства.
Устройство содержит блок 1 управления
5 приводом, элементы И 2, блок 3 вызова, датчик 4 положения, генератор 5 импульсов, счетчик 6 импульсов, блок 7 сравнения, триггер 8, блок 9 памяти кодов грузов.
Все блоки устройства являются информационными элементами автоматики и могут быть выполнены на интегральных схемах адекватных наименований, например 155 и других серий (реализация счетчика 6-2).
Блок 1 управления приводом (фиг. 2) содержит реверсивный усилитель 1-1 мощности, подключенный к двигателю транспортера, два триггера-на базе элементов И-НЕ 1-2...1-9 и конденсаторы 1-10...1-12 на входах.
Устройство работает следующим образом.
В исходном состоянии до подачи команды вызова груза требуемого вида триггер 8, счетчики 6-2, 6-3 импульсов в нулевом со- стоянии, генератор 5 импульсов отключен, состояние счетчика 6-1 импульсов однозначно повторяет код номера ячейки, находящейся на линии выдачи, т. е. выходной сигнал датчика 4 положения. Определение направления движения груза требуемого вида по кратчайшему пути к линии выдачи начинается с момента подачи импульса с выхода блока 3 вызова на S-вход триггера 8. При этом код на выходах блока 3 вызова, соединенных с входами блока 7 сравнения, соответствует виду вызываемого груза. Если груз требуемого вида находится на линии выдачи, то на выходе блока 7. сравнения присутствует логическая 1, что соответст- вует равенству кодов на входах блока 7 сравнения, и на второй S-вход триггера 8 поступает сигнал, запрещающий переход в единичное состояние. Если груза требуемого вида на линии выдачи нет, то триггер 8 переключается в единичное состояние. В результате этого запускается генератор 5 импульсов, информационные входы счетчика 6-1 импульсов отключаются от выходов датчика 4 положения и начинается построч- ный опрос блока 9 памяти кодов грузов. В каждой строке блока 9 памяти кодов грузов, соответствующей ячейке транспортера-накопителя, записан (при загрузке транспортера-накопителя) код вида находящегося в ней груза.
Опрос блока 9 памяти кодов грузов начинается с 1-й строки, соответствующей номеру ячейки на линии выдачи. Одновременно с этим разрешается изменение состояния счетчиков 6-2, 6-3 импульсов.
Пусть грузы требуемого вида находятся только в К-й и Р-й ячейках, причем Р Ж i и K-i N - Р + I, где N - количество ячеек в транспортере-накопителе. Тогда на линию выдачи должна быть перемещена К-ячейка, что соответствует подаче на блок 1 управления приводом импульсной команды Вперёд. Обеспечивается это следующим образом. После того, как на выходе счетчика
6-1 импульсов появится код, соответствующий К-й ячейке, на выходе блока 7 сравнения появится логическая 1, счетчик 6-2 импульсов обнулится, и цикл счета возобновится. Нулевому состоянию счетчика 6-2 импульсов соответствует логический 0 на его прямом выходе О.
С появлением на выходе счетчика 6-1 импульсов кода, соответствующего Р-й ячейке, счетчик 6-2 импульсов вновь обнулится, т. е. пока на п выходе счетчика 6-3 импульсов логический 0, счетчик 6-2 импульсов обнуляется каждой логической 1 на выходе блока 7 сравнения. Счетчик 6-3 импульсов имеет емкость 2N и с приходом N импульсов с начала цикла на выходе счетчика 6-1 импульсов вновь появится код i-й ячейки, счетчик 6-2 импульсов в состоянии N-P + i, нап-М выходе счетчика 6-3 импульсов логическая 1 с выхода блока 7 сравнения и изменено направление его счета на вычитание. С приходом К - i импульсов на выходе блока 7 сравнения появится логическая 1 и будет разрешена подача сигнала на блок 1 управления приводом через элементы И 2-1, 2-2. Учитывая, что (К -.1) импульсов, пришедших на счетчик 6-2 импульсов в режиме вычитания, меньше (IM- - Р + i) импульсов, пришедших в режиме сложения на прямом выходе 0 счетчика 6-2 импульсов будет логическая 1, что приведет к появлению логической 1 на выходе элемента И 2-1, на блок 1 управления приводом будет подан сигнал Вперед.
Если бы К ячейка находилась на большем расстоянии от линии выдачи, чем Р, то количество импульсов, изменивших состояние счетчика 6-2 импульсов после реверса, было бы больше, чем количество импульсов, поступивших после последнего обнуления. Тогда логическая 1 появилась бы на выходе элемента И 2-2, что соответствует сигналу Назад, так как счетчик 6-2 импульсов некольцевой и на его инверсном выходе О присутствовала бы логическая 1 после прихода (N - Р + i) импульсов в режиме вычитания. С появлением логической 1 на выходах элементов И 2-1 и 2-2 начинается перемещение груза требуемого вида на линию выдачи, триггер 8 обнуляется и состояние счетчика 6-1 импульсов вновь начинает повторять код на выходе датчика 4 положения. Когда на линию выдачи будет подана ячейка с грузом требуемого вида, на выходе блока 7 сравнения, а следовательно, и на выходе элемента И 2-3 появится логическая 1 и на блок 1 управления приводом будет подана команда Стоп. При загрузке транспортеpa-накопителя с блока 3 вызова подается код, соответствующий отсутствующему грузу, и на линию выдачи будут передвигаться ближайшие пустые ячейки.
На фиг. 5 приведена временная диаграмма для варианта N 10,1 2, К 4, Р 7.
При заполнении ячейки грузом автоматически либо оператором с пульта производится запись соответствующего виду груза кода в строку блока памяти (цель записи- стирания как несущественный признак на схеме не показана). При повторном вызове пустой ячейки транспортер начнет двигаться в сторону следующей ближней пустой ячейки, так как в строке блока памяти соответствующей ячейке на линии выдачи будет записан код груза определенного вида и запрета на поворот не будет.
Логика работы устройства для всех вариантов однозначно определена выражениями.
Вращение вперед, если
i К Р. K-i N- P + i;
К i Р, Р - i i - К:
, + P:
I Р К, + i.
Вращение назад, если
i К Р. K-i N-P + I;
К l Р. РЧ i-K:
Р К i,l-K N-i + P,
i Р К; Р - i N - К + i.
Принцип определения направления вращения основан на оценке разности между количеством шагов от последней ячейки с грузом требуемого вида до ячейки на линии выдачи в первом цикле опроса и от ячейки на линии выдачи до первой ячейки с грузом требуемого .вида во втором цикле опроса блока памяти. При этом не играет роли-какие номера будет иметь ячейка на линии выдачи и ближайшие слева и справа к ней ячейки.
Каждая операция по загрузке транспортера-накопителя связана с перепрограммированием блока памяти. Причем, учитывая, с одной стороны необходимость оперативного занесения информации, а с другой дли- тельного ее хранения с возможным отключением питающего напряжения блока памяти выполняют на базе ППЗУ, например 519 РЕ1 или 1601 РР1. В режиме Разгрузка информация автоматически стирается, а в режиме Загрузка записывается в ППЗУ.
Сигналы Вперед, Назад являются импульсами, которые запускают R, S-тригге- ры блока 1 управления приводом таким образом, что после прихода импульса Вперед (выход элемента И-2 -1) устанавливается логическая 1 на выходе элемента И НЕ 1-3, что обеспечивает вращение двигателя в прямом направлении, а после прихода импульса Назад -логическая 1 на
выходе элемента И-НЕ и 1-7, и соответственно вращение двигателя в обратном направлении. Для того, чтобы не происходило ложных срабатываний триггеров блока 1 управления приводом, обусловленных различ0 ным быстродействием взаимозависимых цепей устройства, установлены конденсаторы 1-10.. .1-12.
Как показано на временной диаграмме (фиг. 3), триггер 8 переключается после того,
5 как потенциал на конденсаторе 1-10 или 1-11 достигнет значения, соответствующего логической 1. После переключения триггера 8 на выходе блока 7 сравнения некоторое время сохраняется логическая 1,
0 следовательно, на входах элемента И 2-3 присутствуют логические 1, однако это не будет восприниматься как команда Стоп, так как потенциал на выходе элемента И 2-3 будет меньшим соответствующего логиче5 ской 1 (фиг. 3). Величина конденсатора 1-12 выбирается с учетом быстродействия цепи: счетчик 6-1 импульсов, блок 9 памяти кодов грузов, блок 7 сравнения так, чтобы до появления логического 0 на выходе блока 7срав0 нения после переключения триггера 8 потенциал конденсатора 1-12 существенно не изменился и соответствовал логическому 0.
Технико-экономический эффект, дости5 гаемый в предлагаемом устройстве по сравнению с известным, обеспечивается за счет исключения счетчика импульсов, триггера и блока сравнения, что приводит к существенному упрощению устройства при прочих
0 равных технических характеристиках. Достигнутое упрощение позволяет снизить стоимость устройства на 20%.
Формула изобретения Устройство для программного управле5 ния перемещением грузов по замкнутому контуру, содержащее блок управления приводом, входы которого соединены с выходами трех элементов И, блок вызова, датчик положения, генератор импульсов, три счет0 чика импульсов, блок сравнения, триггер, блок, памяти кодов груза, к входам которого подключены выходы первого счетчика импульсов, выходы блока памяти кодов груза подключены к первой группе входов блока
5 сравнения, прямой выход триггера соединен с входом генератора импульсов и первыми установочными входами второго и третьего счетчиков импульсов, а инверсный - с установочным входом первого счетчика импульсов и первым входом третьего элемента И, выход генератора импульсов подключен к тактовым входам первого, второго и третьего счетчиков импульсов, информационные входы первого из которых соединены с выходами датчика положения, выход Вызов блока вызова подключен к первому R-входу триггера, а выход Код груза - к второй группе входов блока сравнения, выход которого соединен с вторым входом третьего элемента И, вторым S-входом триггера и вторым установочным входом второго счетчика импульсов, выходы первого и
0
второго элементов И подключены к R-вхо- дам триггера, отличающееся тем, что, с целью упрощения устройства, выход старшего разряда третьего счетчика импульсов соединен с первыми входами первого и второго элементов И, с третьим установочным входом и с входом реверса второго счетчика импульсов, прямой и инверсный выходы которого соединены с вторыми входами соответственно первого и второго элементов И, третьи входы которых подключены к выходу блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления перемещением объекта по замкнутому контуру | 1988 |
|
SU1550478A1 |
| Устройство для программного управления перемещением объекта по замкнутому контуру | 1988 |
|
SU1620991A1 |
| Устройство для формирования импульсных последовательностей | 1981 |
|
SU1019600A1 |
| Устройство для управления памятью | 1984 |
|
SU1265754A1 |
| Многоканальное устройство для подключения источников информации к общей магистрали | 1985 |
|
SU1290325A1 |
| Устройство для управления параллельным выполнением команд в электронной вычислительной машине | 1982 |
|
SU1078429A1 |
| Устройство для программного реверса движения люлечного конвейера | 1981 |
|
SU1008112A1 |
| Устройство для задания программы обучения | 1985 |
|
SU1320830A1 |
| Устройство для преобразования языков | 1983 |
|
SU1111176A1 |
| Устройство для регистрации эксплуатационных показателей автотранспортных средств | 1988 |
|
SU1566392A1 |
Изобретение относится к средствам программного управления и может быть использовано в системах управления механизированными накопительными устройствами с замкнутым контуром движения. Цель изобретения -упрощениеустройства. Устройство содержит блок управления приводом 1, элементы И 2, блок вызова 3, датчик положения 4, генератор импульсов 5, счетчики 6. блок сравнения 7, триггер 8, блок памяти 9. Устройство обеспечивает более высокий уровень автоматизации управления процессом транспортировки и хранения грузов и существенно проще устройств на базе универсальных микро-ЭВМ, выполняющих аналогичные функции. 5 ил. СО с
Фиг. 2
Фиг.З
ФигЛ
Фие.5
