Фи& 1
10
15
20
25
Изобретение относится к средствам программного управления и может быть использовано в системах управления механизированными накопительными уст- оойствами (конвейерами, транспортерами, стеллажами) с замкнутым контуром движения для оптимального поиска грузов требуемой номенклатуры (вида, сорта).
Цель изобретения - упрощение устройства и повышение его быстродействия,
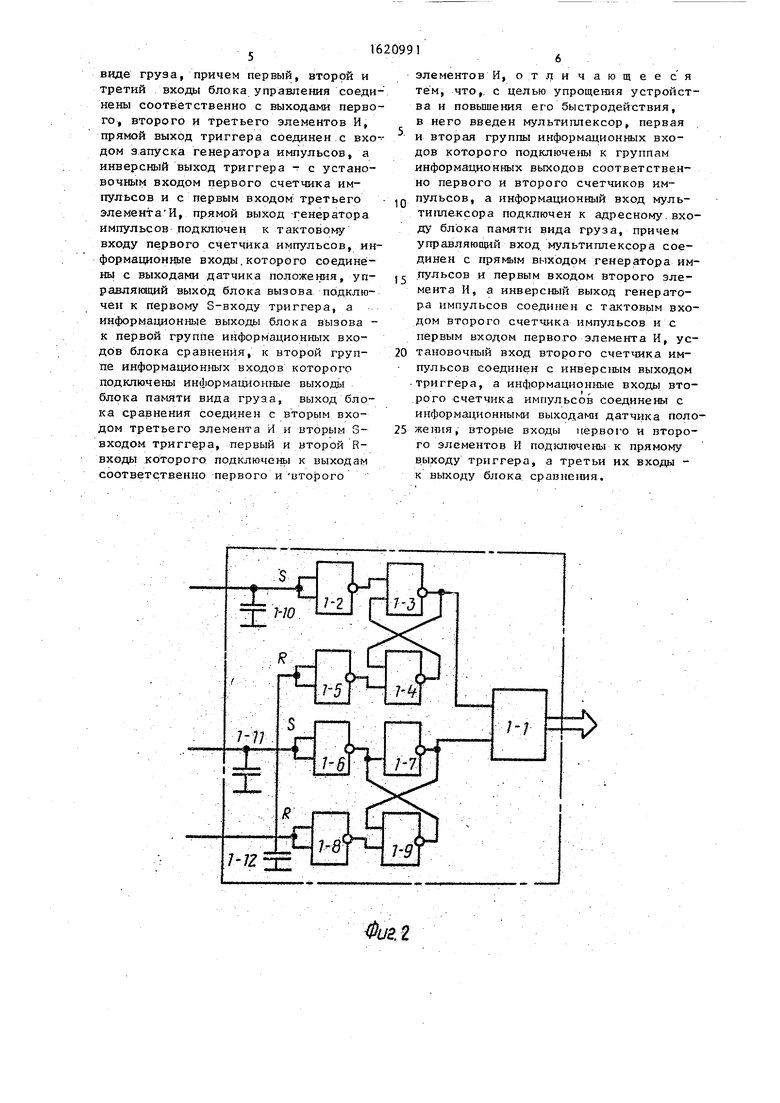
На фиг, 1 приведена структурная функциональная схема устройства; на иг, 2 - схема блока управления приводом,
Устройство содержит блок 1 управения приводом, элементы И 2-1-2-3, блок 3 вызова, датчик 4 положения, генератор 5 импульсов, счетчики 6-1 6-2, блок 7 сравнения, триггер 8, блок 9 памяти и мультиплексор 10, лок 1 включает элементы И-НЕ 1-i - 1-9, образующие триггеры, конденсаторы 1-10 и 1-12.
Устройство работает следующим обазом
В исходном состоянии до подачи команы вызова груза требуемого вида триггер 8, счетчики 6-1 и 6-2 находятся в нулевом состоянии, генератор 5 импульсов отключен, состояние счетчиков 6-1 и 6-2 однозначно повторяет код номера ячейки, находящейся на линии выдачи, т.е. выходной сигнал датчика 4 положения. Определение направления движения груза требуемого вида по кратчайшему пути к линии выдачи начинается с момента подачи управляющего импульса с выхода блока 3 вызова на первый S-вход триггера 8. При этом код на информационных выходах блока 3 вызова,соединенных с первой группой информационных входов блока 7 сравнения, соответствует виду вызываемого груза. Если груз требуемого вида находится на линии выдачи, то на выходе блока 7 сравнения присутствует Г% что соответствует равенству кодов на входах блока 7 сравнения и на второй S-вход триггера 8 поступает сигнал, запрещающий переход в единичное состояние. Если груза требуемого вида на линии выдачи нет, то триггер 8 переключается в единичное состояние, В результате этого за-j пускается генератор 5 импульсов, информационные входы счетчиков 6-1 и
35
40
45
50
10
15
20
25
j
6209914
6-2 отключаются от выходов датчика 4 положения и начинается опрос блока 9 памяти. При этом счетчик 6-1 переключается в прямом направлении по заднему фронту импульсов с генератора 5 импульсов, а счетчик 6-2 - в обратном направлении по переднему фронту импульсов. На выход мультиплексора 10 поочередно подается код с информационных выходов счетчика 6-2 (1 на выходе генератора 5 импульсов) и счетчика 6-1 (О на прямом выходе генератора 5 импульсов), происходит реверсивный опрос блока 9 памяти, В каждой строке блока 9 памяти, соответствующей ячейке транспортера-накопителя записан (при загрузке транспортера-накопителя) код вида находящегося в ней груза.
Пусть опрос блока 9 памяти начинается с i-й строки, соответствующей номеру ячейки на линии выдачи, и грузы требуемого вида находятся только в К-й и Р-й ячейках, причем и К-т N-P+i, где N - количество ячеек в транспортере-накопителе. Тогда на линию выдачи должна быть перемещена К-я ячейка, что соответствует подаче на блок 1 управления приводом команды Вперед. Обеспечивается это следующим образом. После того, как на информационном выходе счетчика 6-1 появится код соответствующий К-й ячейке, на выходе блока 7 сравнения появляется 1 и, следовательно, 1 будет на выходе элемента И 2-1.
Когда на линию выдачи будет подана ячейка с грузом требуемого вида на выходе блока сравнения, а следователь35
40
45
50
но, и на выходе элемента И 2-3 появляется 1 и на блок 1 управления приводом подается команда Стоп, При загрузке транспортера-накопителя с блока вызова подается код, соответствующий отсутствию груза, и на линию выдачи передвигаются ближайшие пустые ячейки.
Формула изобретения
Устройство для программного управления перемещением объекта по замкнутому контуру, содержащее блок управления приводом, первый, второй и третий элементы И, блок вызова, датчик положения, генератор импульсов, первый и второй счетчики импульсов, блок сравнения, триггер и блок памяти в
виде груза, причем первый, второй и третий входы блока управления соединены соответственно с выходами первого, второго и третьего элементов И, прямой выход триггера соединен с входом запуска генератора импульсов, а инверсный выход триггера - с установочным входом первого счетчика импульсов и с первым входом третьего элемента И, прямой выход генератора импульсов подключен к тактовому входу первого счетчика импульсов, информационные входы.которого соединены с выходами датчика положения, уп- равляющий выход блока вызова подключен к первому S-входу триггера, а информационные выходы блока вызова - к первой группе информационных входов блока сравнения, к второй труп- пе информационных входов которого подключены информационные выходы блока памяти вида груза, выход блока сравнения соединен с вторым входом третьего элемента И и вторым S- входом триггера, первый и второй R- входы которого подключены к выходам соответственно первого и -второго
элементов И, отличающееся тем, что, с целью упрощения устройства и повышения его быстродействия, в него введен мультиплексор, первая и вторая группы информационных входов которого подключены к группам информационных выходов соответственно первого и второго счетчиков импульсов, а информационный вход мультиплексора подключен к адресному входу блока памяти вида груза, причем управляющий вход мультиплексора соединен с прямым выходом генератора импульсов и первым входом второго элемента И, а инверсный выход генератора импульсов соединен с тактовым входом второго счетчика импульсов и с первым входом первого элемента И, установочный вход второго счетчика импульсов соединен с инверсным выходом триггера, а информационные входы второго счетчика импульсов соединены с информационными выходами датчика положения, вторые входы первого и второго элементов И подключены к прямому выходу триггера, а третьи их входы - к выходу блока сравнения.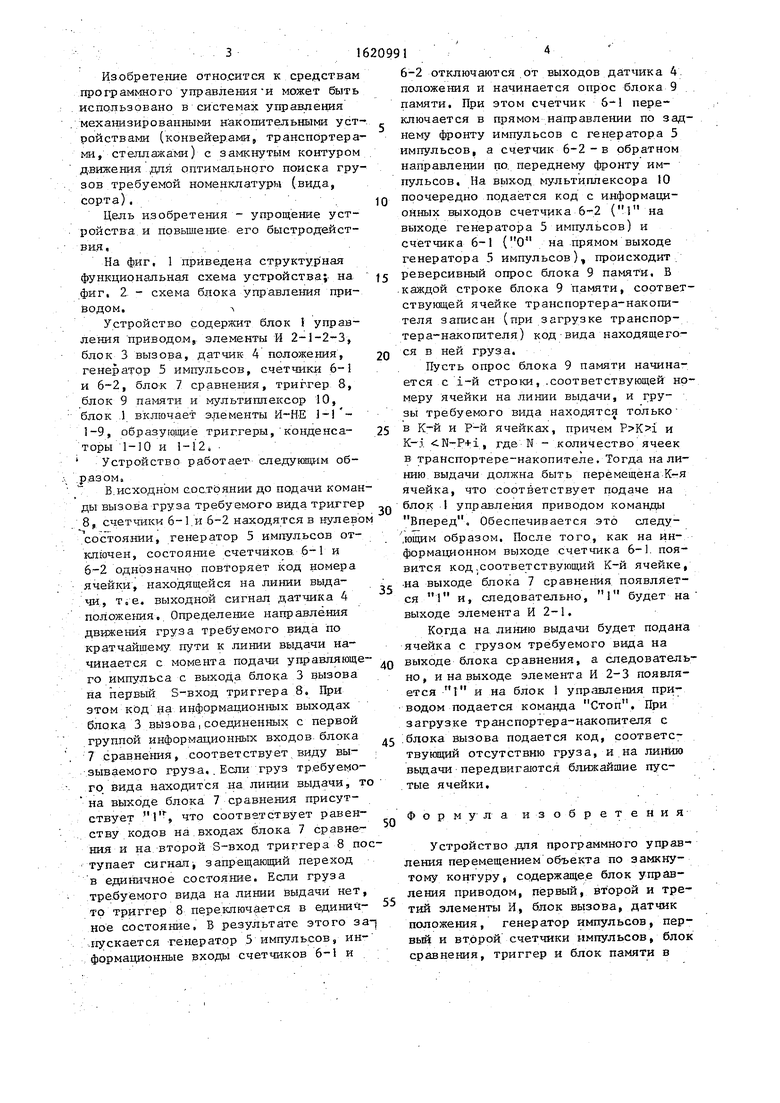
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления перемещением объекта по замкнутому контуру | 1988 |
|
SU1550478A1 |
| Устройство для программного управления перемещением груза по замкнутому контуру | 1989 |
|
SU1721588A1 |
| Буферное оперативное запоминающее устройство | 1988 |
|
SU1559379A1 |
| Узел управления в сортирующих устройствах | 1983 |
|
SU1125070A2 |
| Буферное запоминающее устройство | 1989 |
|
SU1654875A1 |
| Многоканальное устройство для сопряжения ЭВМ | 1988 |
|
SU1695311A1 |
| Буферное запоминающее устройство | 1990 |
|
SU1833918A1 |
| Многоканальное устройство для сбора, обработки и выдачи информации | 1990 |
|
SU1753482A1 |
| Устройство для преобразования Хо изображения | 1990 |
|
SU1785004A1 |
| Устройство оперативной громкоговорящей связи | 1984 |
|
SU1170628A1 |
Изобретение относится к средствам программного управления и может быть использовано в системах управления механизированными накопительными устройствами (конвейерам, транспортерами, стеллажами) с замкнутым контуром движения для оптимального поиска грузов требуемой номенклатуры. Цель изобретения - упрощение устройства и повышение его быстродействия. Устройство содержит бпок 1 управления приводом, элементы И 2-1-2-3, блок 3 вызова, датчик 4 положения, генератор 5 импульсов, счетчики 6-1, 6-2, блок 7 сравнения, триггер 8, блок 9 памяти, мультиплексор 10. Устройство позволяет за минимальное время выбрать такое направление движения транспортера накопителя дня перемещения груза требуемого вида на линию выдачи, при котором расстояние перемещения будет минимально возможным. 2 ил. g
| Деэмульгатор для разрушения нефтяных эмульсий | 1959 |
|
SU131431A1 |
| Устройство для программного управления | 1984 |
|
SU1211693A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
