// 8
10
re
/J
22 20 1B // /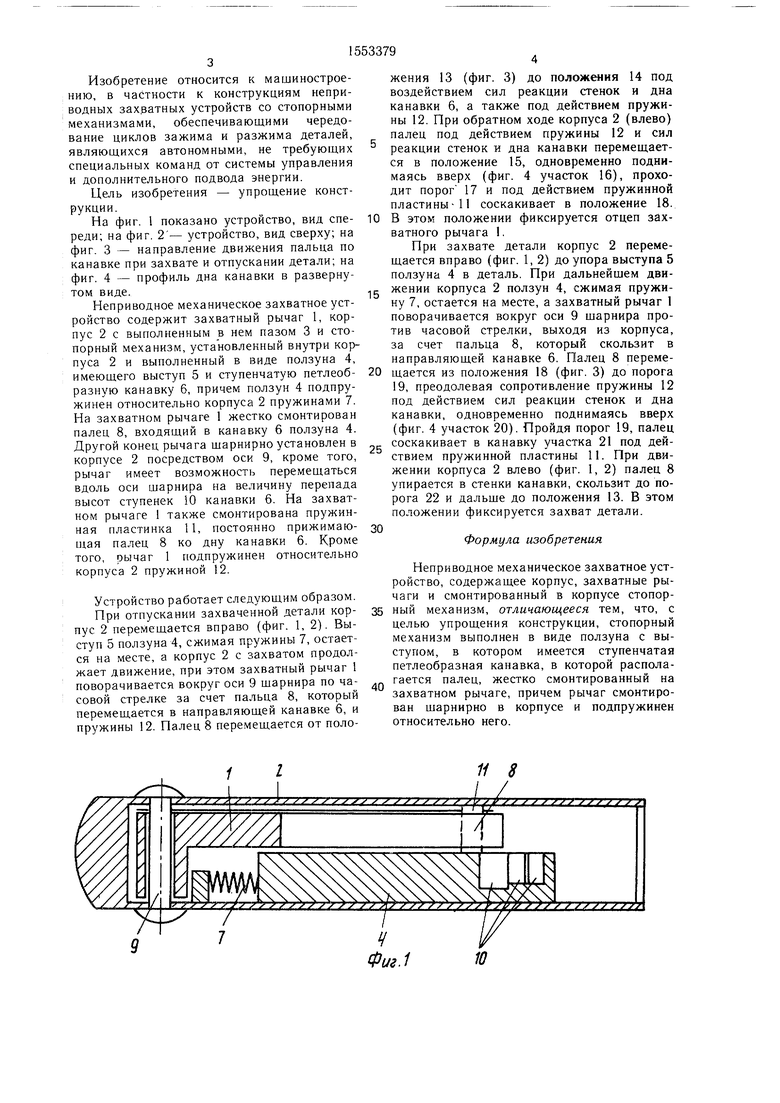
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1511117A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОЙ ОТТЯЖКИ ПОЛОТНА НА АВТОМАТИЧЕСКОЙ ТРИКОТАЖНОЙ МАШИНЕ, ПРЕИМУЩЕСТВЕННО ПЛОСКОВЯЗАЛЬНОЙ | 1992 |
|
RU2078861C1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1978 |
|
SU766727A1 |
| Захват механической руки для пере-МЕщЕНия пОлыХ КОРпуСНыХ издЕлий | 1979 |
|
SU812570A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Выключатель подачи | 1990 |
|
SU1794559A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
Изобретение относится к машиностроению, в частности к конструкциям неприводных захватных устройств. Целью изобретения является упрощение конструкции. Устройство содержит корпус 2 с пазом 3, захватный рычаг 1, шарнирно смонтированный в корпусе. На рычаге 1 жестко смонтирован палец 8, а сам рычаг подпружинен относительно корпуса пружиной 12 и пружинной пластинкой. Внутри корпуса 2 установлен ползун 4, имеющий выступ 5. В ползуне 4 выполнена петлеобразная канавка, дно которой имеет ступенчатую форму. Ползун 4 подпружинен относительно корпуса 2 пружинами 7. Для захвата детали корпус 2 перемещается вправо до упора выступа 5 ползуна 4 в деталь. При дальнейшем движении корпуса 2 ползун 4, сжимая пружину 7, остается на месте,а захватный рычаг 1 поворачивается вокруг оси шарнира против часовой стрелки. При движении корпуса 2 влево происходит доворот рычага 1 и фиксируется захват детали. Отпускание детали происходит аналогичным образом. 4 ил.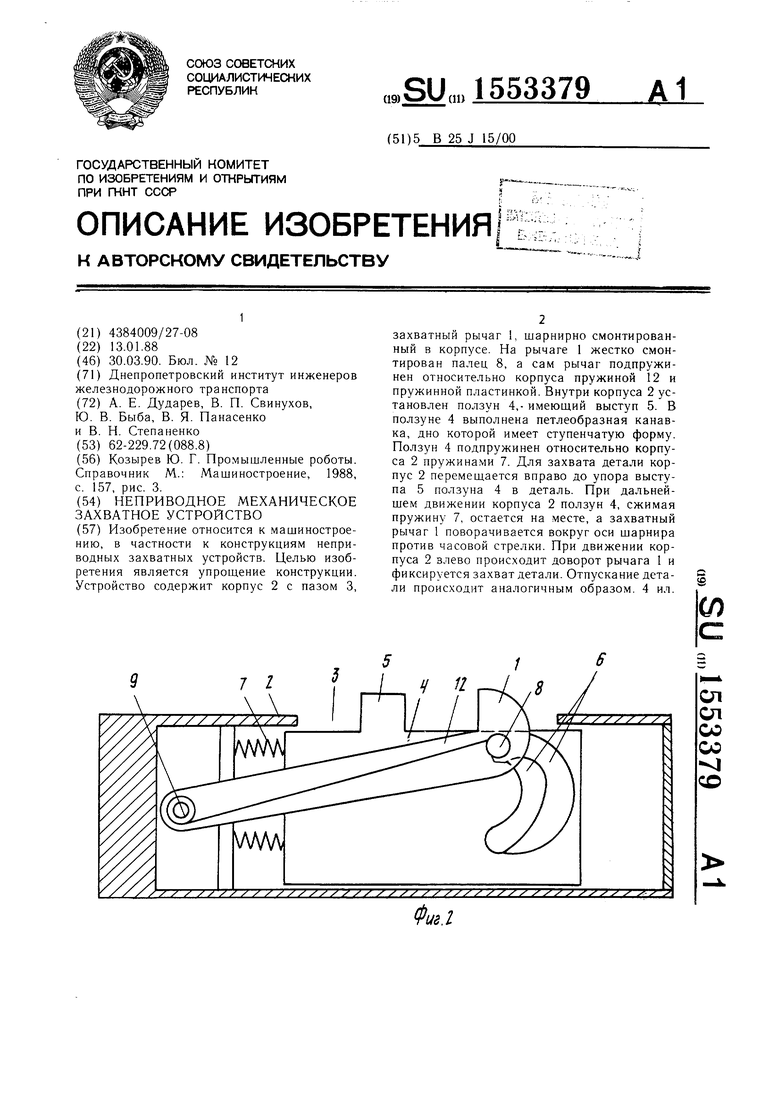
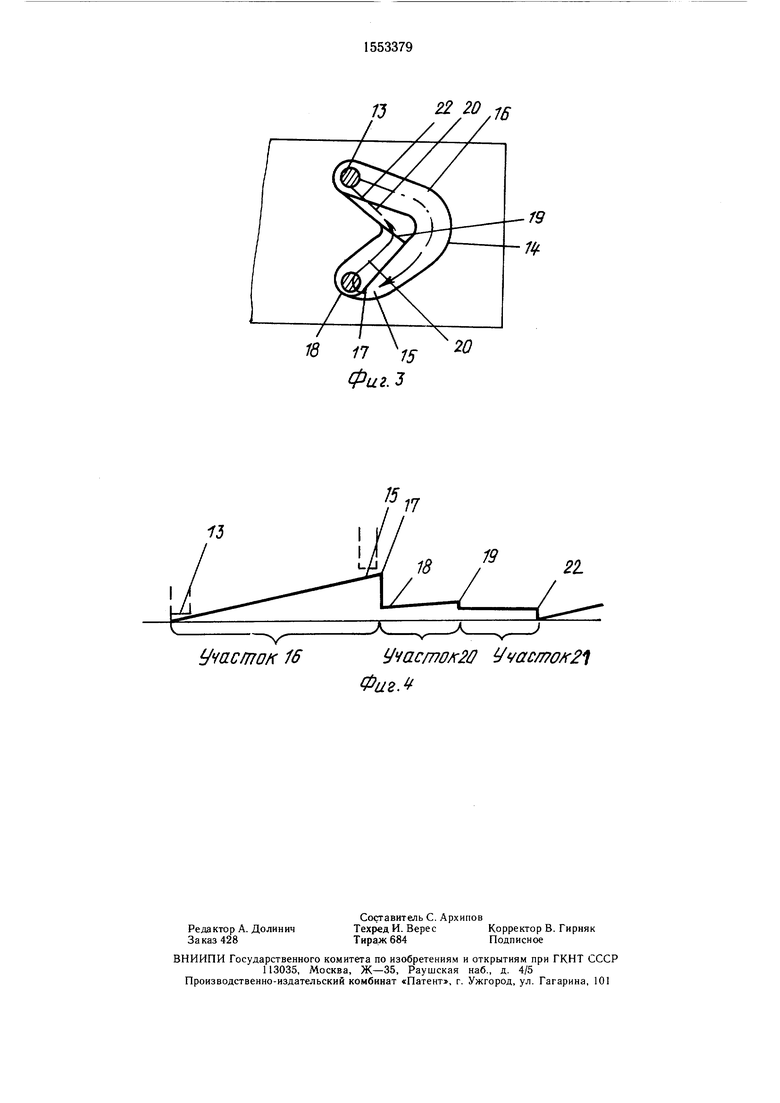
Фиг.З
fj
л
Участок 16
Учасл7ох2в Учасл ох21 Фи2.4
| Козырев Ю | |||
| Г | |||
| Промышленные роботы | |||
| Справочник М.: Машиностроение, 1988, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
