ел
3 1
Изобретение относится к машиностроению, в частности к технологическому оборудованию, применяемому для механизации и автоматизации про- йзводственных процессов, и может быть использовано в конструкциях промышленных роботов, погрузочных манипуляторов и механических рук.
Целью изобретения является расши- рение технологических возможностей захвата путем обеспечения захвата деталей различных форм, ; На чертеже представлен захват манипулятора, общий вид. , : Захват манипулятора состоит из неподвижного корпуса I, перемещающегося в нем штока 2, на котором находятся пружина 3 и ползун 4 с шарнирно установленными на нем собачками 5. Ко- ромысло 6, жестко закрепленное на щтоке 2, при помощи серег 7 кинематически связано с захватньми рычагами 8, на концах которых расположены ролики 9 и губки 10.
Захват манипулятора работает следующим образом.
Вначале положения шток 2 находится в крайнем верхнем положении, а ползун 4 под действием пружины 3 упирается в коромысло 6, жестко закрепленное на штоке 2. При этом собачки 5 отжаты, а связанные серьгами 7 с коромыслом 6 захватные рычаги 8 и зажимные губки 10, между которыми расположена деталь, разведены.
При опускании штока 2 ползун 4 и кинетически связанные с ним захватные рычаги 8 с закрепленными на
174
них роликами 9 перемещаются вниз. При упирании роликов 9 в базовую поверхность, на которой находится деталь, ползун 4 смещается вверх относительно штока 2, заставляя сдвигаться захватные рычаги 8. После того как шток 2 опустится, собачки 5 фиксируют захватные рычаги 8. Деталь зажата и может транспортироваться.
При движении штока 2 вверх все устройство, за исключением неподвижного корпуса 1, поднимается. При этом собачки 5 поверхностью 11 упираются в поверхность 12 неподвижного корпуса 1 и происходит расфиксация захватных рычагов 8, которые под действием пружины 3 на ползун 4 раздвигаются и освобождают деталь.
ормула изобретения
Захват манипулятора, содержащий неподвижный корпус, расположенный в нем шток, на котором установлены ползун и коромысло, причем ползун связан шарнирно с зажимными рычагами непосредственно, а коромысло - через серьги, отличающийся тем, что, с целью расширения технологических возможностей, ползун подпружинен относительно корпуса и на ползуне шарнирно установлены собачки, имеющие возможность располагаться в пазах, выполненных на захватных рычагах, а на концах захватных рычагов смонтированы ролики, имеющие возможность взаимодействовать с базовой поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU812567A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ИЗДЕЛИЙ С КОНВЕЙЕРА И ИХ УКЛАДКИ В ТАРУ | 2014 |
|
RU2549319C1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Автоматическое вакуумное захватное устройство | 1988 |
|
SU1588681A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях промышленных роботов, манипуляторов и механических рук. Целью изобретения является расширение технологических возможностей захвата. В исходном положении шток 2 находится в крайнем верхнем положении, ползун 4 упирается в коромысло 6, при этом собачки 5 отжаты, а захватные рычаги 8 разведены. При опускании штока 2 ролики 9 упираются в базовую поверхность, на которой находится деталь, ползун 4 смещается вверх, заставляя сдвигаться захватные рычаги 8. Собачки 5 фиксируют захватные рычаги после зажатия детали. Раскрытие захвата осуществляется следующим образом. Шток 2 перемещается вверх, собачки 5 упираются в корпус 1, и рычаги 8 в результате воздействия пружины 3 на ползун 4 раздвигаются, освобождая деталь. 1 ил.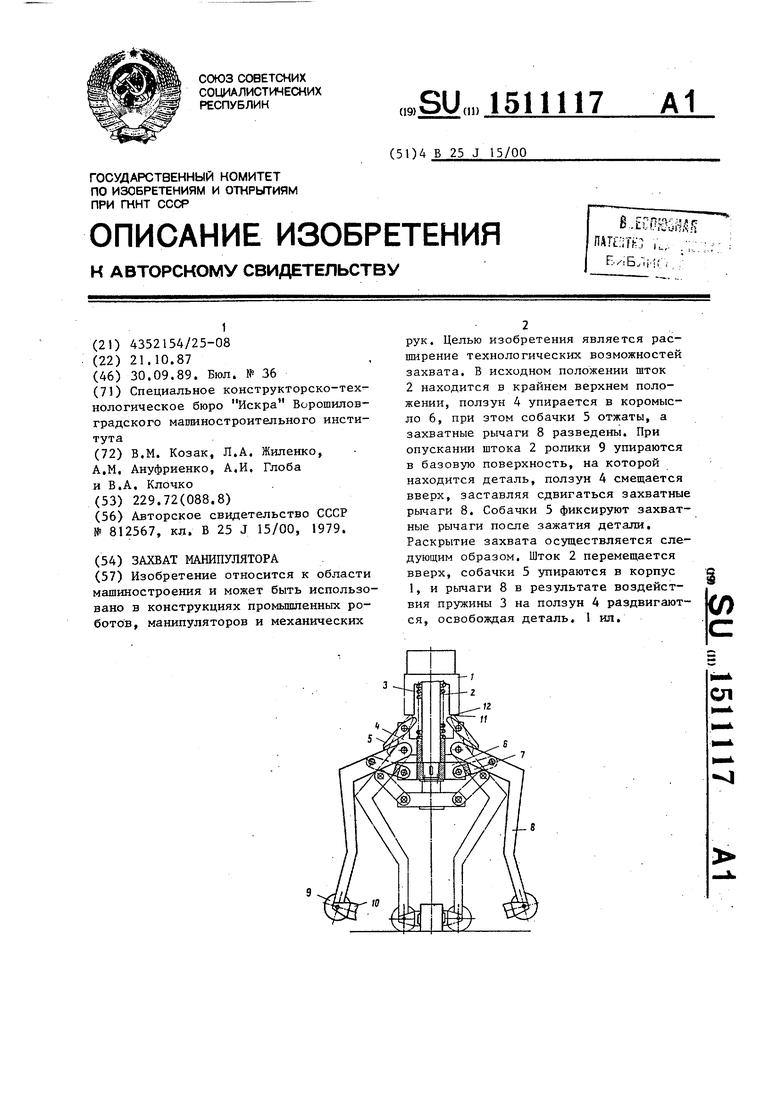
| Захват манипулятора | 1979 |
|
SU812567A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
