t
(21)4447126/27-03
(22)22.06.88
(46) 30.03.90. Бюл. 8 12
(75) Ф.М. Усманов и Б.С. Мигапов
(53)621.767(088.8)
(56)Авторское свидетельство СССР 36441-3, кл. В 23 Q 7/18, 1971.
Авторское свидетельство СССР № 1222602, кл. В 65 G 47/24, 1984.
(54)УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ С ПАЗОМ НА ОБРАЗУЮЩЕЙ ПОВЕРХНОСТИ
(57)Изобретение относится к конвейерному машиностроению и позволяет повысить надежность ориентации длинномерных деталей. Устройство содержит смонтированную на основании 5 с возможностью размещения в пазу 2 детали . (Д) 1 направляющую (Н) 4, подающее приспособление 3 и передающий механизм в виде ползуна (П) 7. Последний осуществляет возвратно-поступательное перемещение от привода 6. В П 7 выполнены поперечный паз 8 для размещения Д 1 и продольный паз 9 для Н 4. Последняя расположена вдоль направления перемещения П 7. С приспособления 3 осуществляется подача Д 1 в паз 8 П 7. При перемещении П 7 от привода 6 происходит обкатывание Д 1 по Н 4 до взаимодействия паза 2 с последней. Далее Д 1 проскальзывает вдоль Н 4 до рабочей позиции. 9 ил.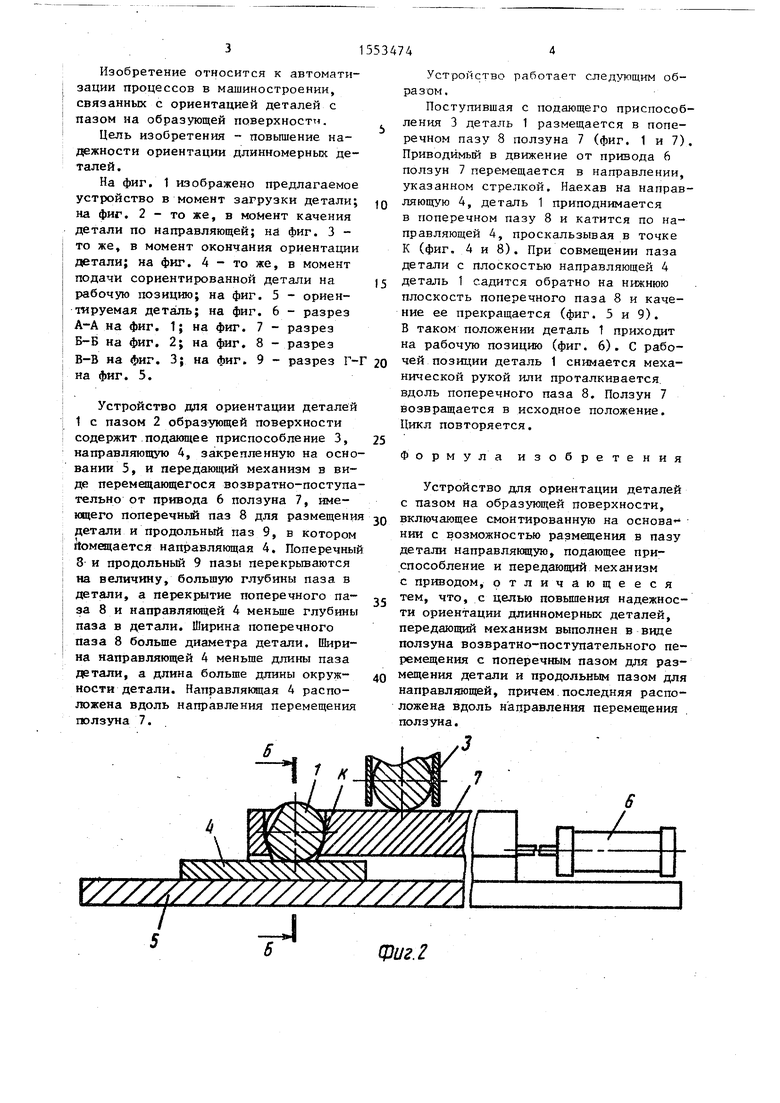
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Автоматическая сборочная линия спутникового типа | 1988 |
|
SU1625558A1 |
| Автоматическая линия для обработки концов длинномерных деталей | 1985 |
|
SU1337236A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Ориентирующее устройство | 1990 |
|
SU1745510A1 |
| Автоматическая роторно-конвейерная линия для сборки медицинской иглы однократного применения | 1990 |
|
SU1775266A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Роторный автомат питания | 1987 |
|
SU1530407A1 |
| Транспортная система гибкой автоматической линии | 1976 |
|
SU722731A1 |
Изобретение относится к конвейерному машиностроению и позволяет повысить надежность ориентации длинномерных деталей. Устройство содержит смонтированную на основании 5 с возможностью размещения в пазу 2 детали (Д) 1 направляющую (Н) 4, подающее приспособление 3 и передающий механизм в виде ползуна (П) 7. Последний осуществляет возвратно-поступательное перемещение от привода 6. В П 7 выполнены поперечный паз 8 для размещения Д 1 и продольный паз 9 для Н 4. Последняя расположена вдоль направления перемещения П 7. С приспособления 3 осуществляется подача Д 1 в паз 8 П 7. При перемещении П 7 от привода 6 происходит обкатывание Д 1 по Н 4 до взаимодействия паза 2 с последней. Далее Д 1 проскальзывает вдоль Н 4 до рабочей позиции. 9 ил.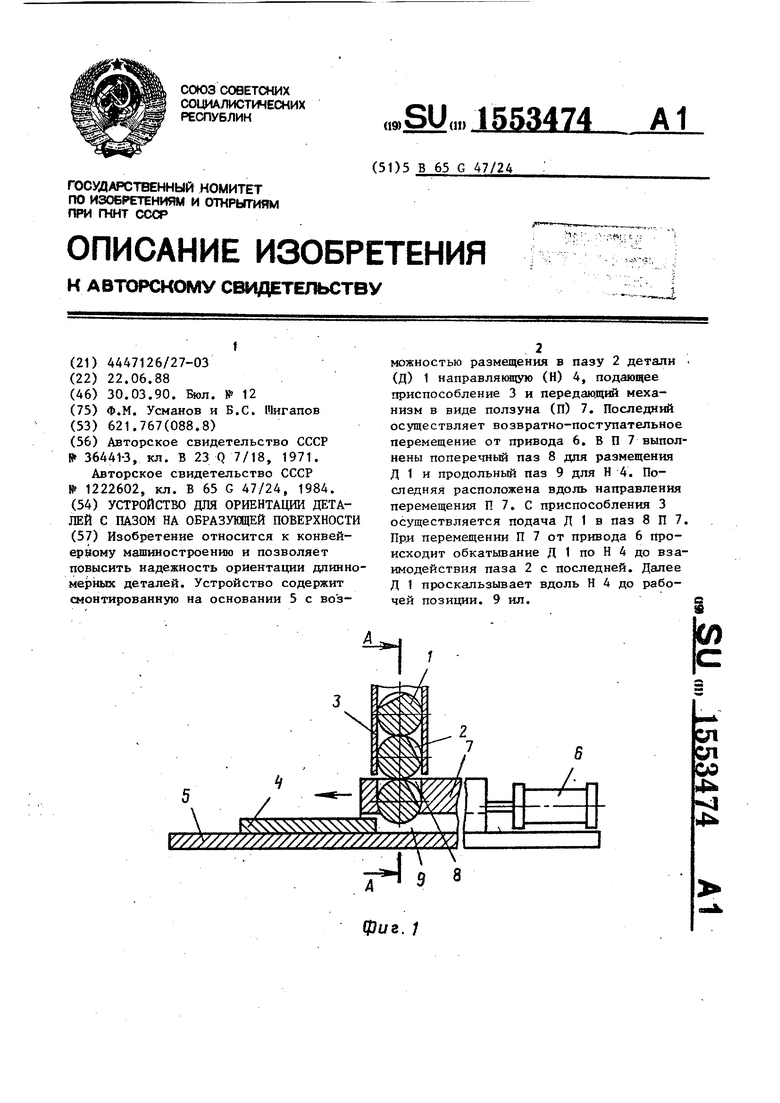
/
SSSSSSSS SSS
у//у//////////////////////л//ж
(Л
фиг.;
Изобретение относится к автоматизации процессов в машиностроении, связанных с ориентацией деталей с пазом на образующей поверхности.
Цель изобретения - повышение надежности ориентации длинномерных деталей.
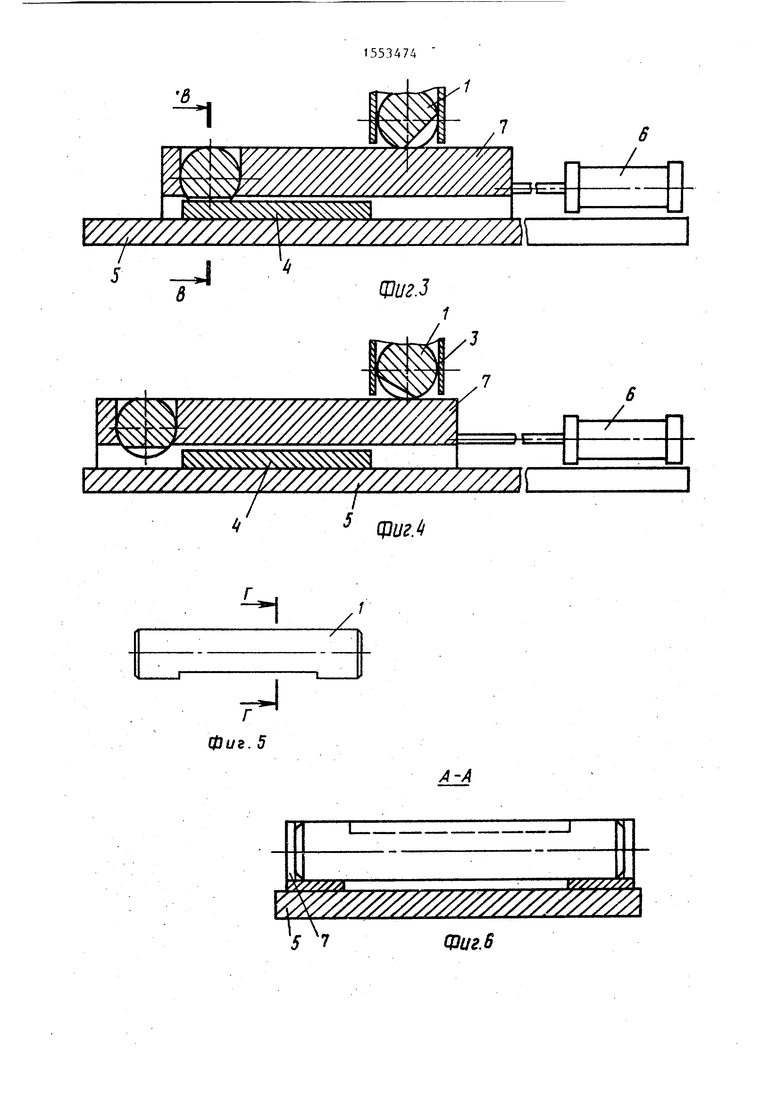
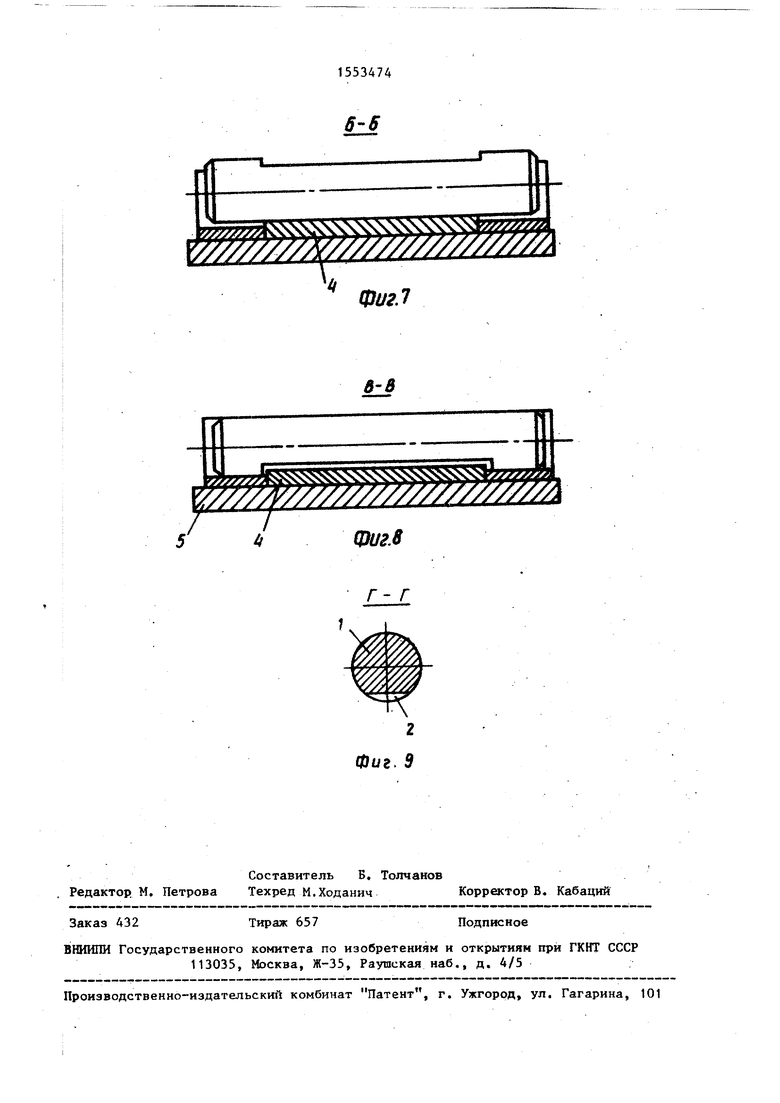
На фиг. 1 изображено предлагаемое устройство в момент загрузки детали; на фиг. 2 - то же, в момент качения детали по направляющей; ни фиг. 3 - то же, в момент окончания ориентации детали; на фиг. 4 - то же, в момент подачи сориентированной детали на рабочую позицию; на фиг. 5 - ориентируемая деталь; на фиг. 6 - разрез А-А на фиг. 1; на фиг. 7 - разрез Б-Б на фиг. 2; на фиг. 8 - разрез В-В на фиг. 3; на фиг. 9 - разрез Гна фиг. 5.
Устройство для ориентации деталей 1 с пазом 2 образующей поверхности содержит подающее приспособление 3, направляющую 4, закрепленную на основании 5, и передающий механизм в виде перемещающегося возвратно-поступательно от привода 6 ползуна 7, имеющего поперечный паз 8 для размещени детали и продольный паз 9, в котором помещается направляющая 4. Поперечный 8 и продольный 9 пазы перекрываются на величину, большую глубины паза в детали, а перекрытие поперечного паза 8 и направляющей 4 меньше глубины паза в детали. Ширина поперечного паза 8 больше диаметра детали. Ширина направляющей 4 меньше длины паза детали, а длина больше длины окруж- ности детали. Направляющая 4 расположена вдоль направления перемещения ползуна 7.
Y////X///77///////7/7/A
7
г
фиг.2
5
о
5
Устройство работает следующим образом.
Поступившая с подающего приспособления 3 деталь 1 размещается в поперечном пазу 8 ползуна 7 (фиг. 1 и 7). Приводимый в движение от привода 6 ползун 7 перемещается в направлении, указанном стрелкой. Наехав на направляющую 4, деталь 1 приподнимается в поперечном пазу 8 и катится по направляющей 4, проскальзывая в точке К (фиг. 4 и 8). При совмещении лаза детали с плоскостью направляющей 4 деталь 1 садится обратно на нижнюю плоскость поперечного паза 8 и качение ее прекращается (фиг. 5 и 9). В таком положении деталь 1 приходит на рабочую позицию (фиг. 6). С рабочей позиции деталь 1 снимается механической рукой или проталкивается вдоль поперечного паза 8. Ползун 7 возвращается в исходное положение. Цикл повторяется.
Формула изобретения
Устройство для ориентации деталей с пазом на образующей поверхности, включающее смонтированную на основа нии с возможностью размещения в пазу детали направляющую, подающее приспособление и передающий механизм с приводом, отличающееся тем, что, с целью повышения надежности ориентации длинномерных деталей, передающий механизм выполнен в виде ползуна возвратно-поступательного перемещения с поперечным пазом для размещения детали и продольным пазом для направляющей, причем последняя расположена вдоль направления перемещения ползуна.
фиг.2
I Г-
Y/////////////J////////////////////A(
I
H
/
и
фиг. 5
5 7
фиг. 4
07г/г5
ШФЗ$$Ш$$Н у/ ///////////////// 7л
5 4фиг.8
Составитель Б. Толчанов Редактор М. Петрова Техред М.Ходанич Корректоре. Кабаций
Заказ 432
Тираж 657
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
ФигЛ
г- г
Подписное
