нию электромагнита возрастает элект- 25 сигнал 1. Это приведет к запуску
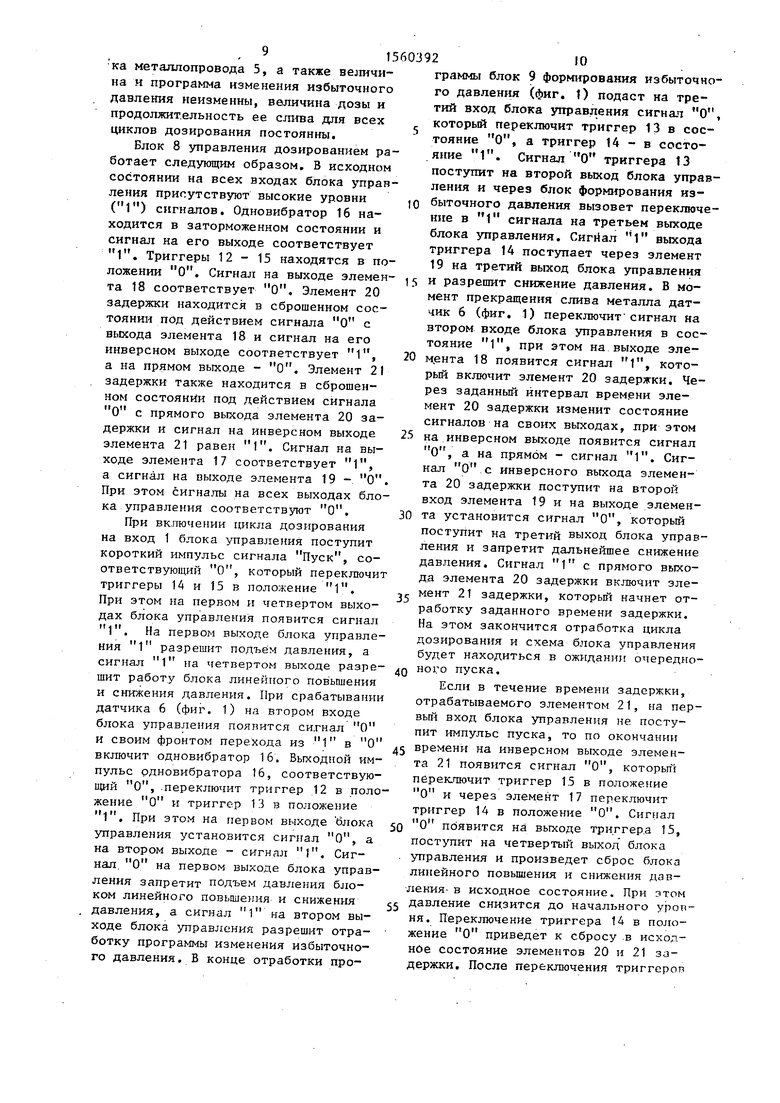
ромагнитное давление в дозаторе). Под действием этого давления (фиг. 6) металл поднимается по сливному метал- лопроводу 5 со скоростью, пропорциональной повышенному давлению.
в блоке 8 элемента 20 задержки. Пос ле отработки заданного времени этим элементом на третьем выходе блока 8 в момент t появится сигнал, прекра 30 щающий снижение давления блоком 7.
35
При прохождении расплавом контрольного участка на выходе сливного ме- таллопровода 5 срабатывает (момент времени t, фиг. 6) датчик 6, сигнал с которого поступает на второй вход блока 8 управления. При этом на первом входе блока 7 исчезает и одновременно возникает сигнал на входе блока 9. В соответствии с программой изменения давления, приведенной в ка- дд честве примера на фиг. 6, с момента времени t , начала слива металла с первого выхода блока 9 на второй вход блока 10 поступает сигнал в виде нарастающего напряжения. В момент t 2 д давление возрастает на заданную величину ДР, срабатывает компаратор 32 блока 9 и повышение давления (напряжения электромагнита) прекращается. В момент t3 сигнал на выходе интегра- CQ тора 40 блока 9 достигает уровня срабатывания компаратора 31, в результате чего напряжение на электромагните (давление-в дозаторе) и расход снижаются.
55
I .i
Под действием формируемого блоком
9 избыточного давления металл поступает в форму.
в блоке 8 элемента 20 задержки. После отработки заданного времени этим элементом на третьем выходе блока 8 в момент t появится сигнал, прекра- щающий снижение давления блоком 7.
5
дCQ
5
На выходе блока 10 установится сигнал, обеспечивающий через блок 11 и электромагнит 4 давление в дозаторе, удерживающее металл выше исходного уровня металла в металлотроводе, но ниже его сливного отверстия. Устройство готово к следующему циклу дозирования.
Во избежание частичной или полной кристаллизации металла в сливном ме- таллопроводе при удержании распла- ва у сливного отверстия предусмотрен сброс давления в дозаторе до исходного уровня Рну (момент t 7) в случае, если в течение времени задержки (1 - 1,5 мин), вырабатываемого элементом 21 блока 8, на первый вход этого блока не поступит команда Пуск.
При снижении уровня металла в тигле 1 (фиг. 1), изменении гидравлического сопротивления металлотракта вследствие зарастания канала окислами и т.п. при включении цикла дозирования автоматически увеличится напряжение на электромагните, обеспечивающее подъем металла к сливному от-| верстию. В связи с тем, что положение контролируемого датчиком 6 участ
ка металлопровода 5, а также величина и программа изменения избыточного давления неизменны, величина дозы и продолжительность ее слива для всех циклов дозирования постоянны.
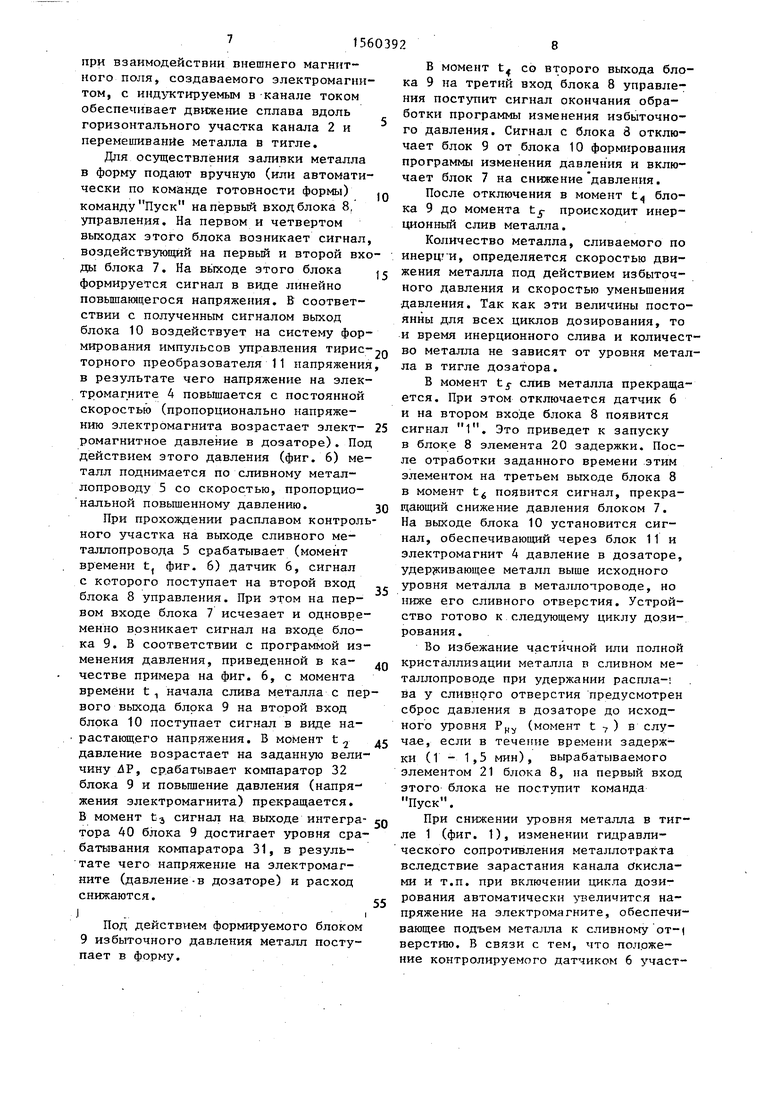
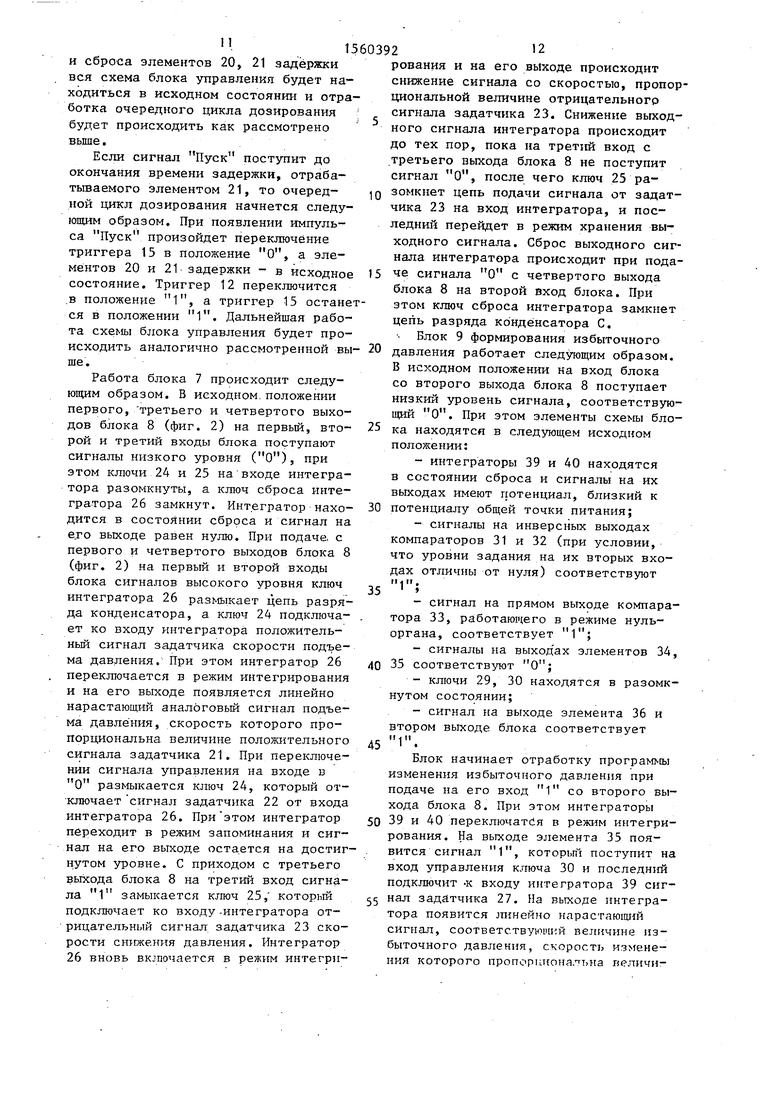
Блок 8 управления дозированием работает следующим образом. В исходном состоянии на всех входах блока управления присутствуют высокие уровни (1) сигналов. Одновибратор 16 находится в заторможенном состоянии и сигнал на его выходе соответствует 1. Триггеры 12 - 15 находятся в положении О. Сигнал на выходе элемен- та 18 соответствует О. Элемент 20 задержки находится в сброшенном состоянии под действием сигнала О с выхода элемента 18 и сигнал на его инверсном выходе соответствует 1, а на прямом выходе - О. Элемент 21 задержки также находится в сброшенном состоянии под действием сигнала О с прямого выхода элемента 20 задержки и сигнал на инверсном выходе элемента 21 равен 1. Сигнал на выходе элемента 17 соответствует 1, а сигнал на выходе элемента 19 - О. При этом сигналы на всех выходах блока управления соответствуют 0м.
При включении цикла дозирования на вход 1 блока управления поступит короткий импульс сигнала Пуск, соответствующий О, который переключит триггеры 14 и 15 в положение 1. При этом на первом и четвертом выходах блока управления появится сигнал 1. На первом выходе блока управления 1м разрешит польем давления, а сигнал 1 на четвертом выходе разрешит работу блока линейного повышения и снижения давления. При срабатывании датчика 6 (фиг. 1) на втором входе блока управления появится сигнал О и своим фронтом перехода из 1 в О включит одновибратор 16. Выходной импульс одновибратора 16, соответствующий О, переключит триггер 12 в положение О и триггер 14 в положение 1, При этом на первом выходе блока управления установится сигнал О, а на втором выходе - сигнал 1. Сигнал О на первом выходе блока управления запретит подъем давления блоком линейного повышения и снижения давления, а сигнал 1 на втором выходе блока управления разрешит отработку программы изменения избыточного давления. В конце отработки про
0
0
5
j
0
5
0
5
0
5
граммы блок 9 формирования избыточного давления (фиг. t) подаст на третий вход блока управления сигнал О, который переключит триггер 13 в состояние О, а триггер 14 - в состояние 1. Сигнал О триггера 13 поступит на второй выход блока управления и через блок формирования избыточного давления вызовет переключение в 1 сигнала на третьем выходе блока управления. Сигнал 1 выхода триггера 14 поступает через элемент 19 на третий выход блока управления и разрешит снижение давления. В момент прекращения слива металла датчик 6 (фиг. 1) переключит сигнал на втором входе блока управления в состояние 1, при этом на выходе элемента 18 появится сигнал 1, который включит элемент 20 задержки. Через заданный интервал времени элемент 20 задержки изменит состояние сигналов на своих выходах, лри этом на инверсном выходе появится сигнал О, а на прямом - сигнал 1. Сигнал О с инверсного выхода элемента 20 задержки поступит на второй вход элемента 19 и на выходе элемента установится сигнал О, который поступит на третий выход блока управления и запретит дальнейшее снижение давления. Сигнал 1 с прямого выхода элемента 20 задержки включит элемент 21 задержки, который начнет отработку заданного времени задержки. На этом закончится отработка цикла дозирования и схема блока управления будет находиться в ожидании очередно- ного пуска.
Если в течение времени задержки, отрабатываемого элементом 21, на первый вход блока управления не поступит импульс пуска, то по окончании времени на инверсном выходе элемента 21 появится сигнал О, который переключит триггер 15 в положение О и через элемент 17 переключит триггер 14 в положение О. Сигнал О появится на выходе триггера 15, поступит на четвертый выход блока управления и произведет сброс блока линейного повышения и снижения давления в исходное состояние. При этом давление снизится до начального уровня. Переключение триггера 14 в положение О приведет к сбросу в исходное состояние элементов 20 и 21 задержки. После переключения триггероп
и сброса элементов 20, 21 задержки вся схема блока управления будет находиться в исходном состоянии и отработка очередного цикла дозирования будет происходить как рассмотрено выше.
Если сигнал Пуск поступит до окончания времени задержки, отрабатываемого элементом 21, то очередной цикл дозирования начнется следующим образом. При появлении импульса Пуск произойдет переключение триггера 15 в положение О, а элементов 20 и 21 задержки - в исходное состояние. Триггер 12 переключится в положение 1, а триггер 15 останется в положении 1. Дальнейшая работа схемы блока управления будет происходить аналогично рассмотренной выше.
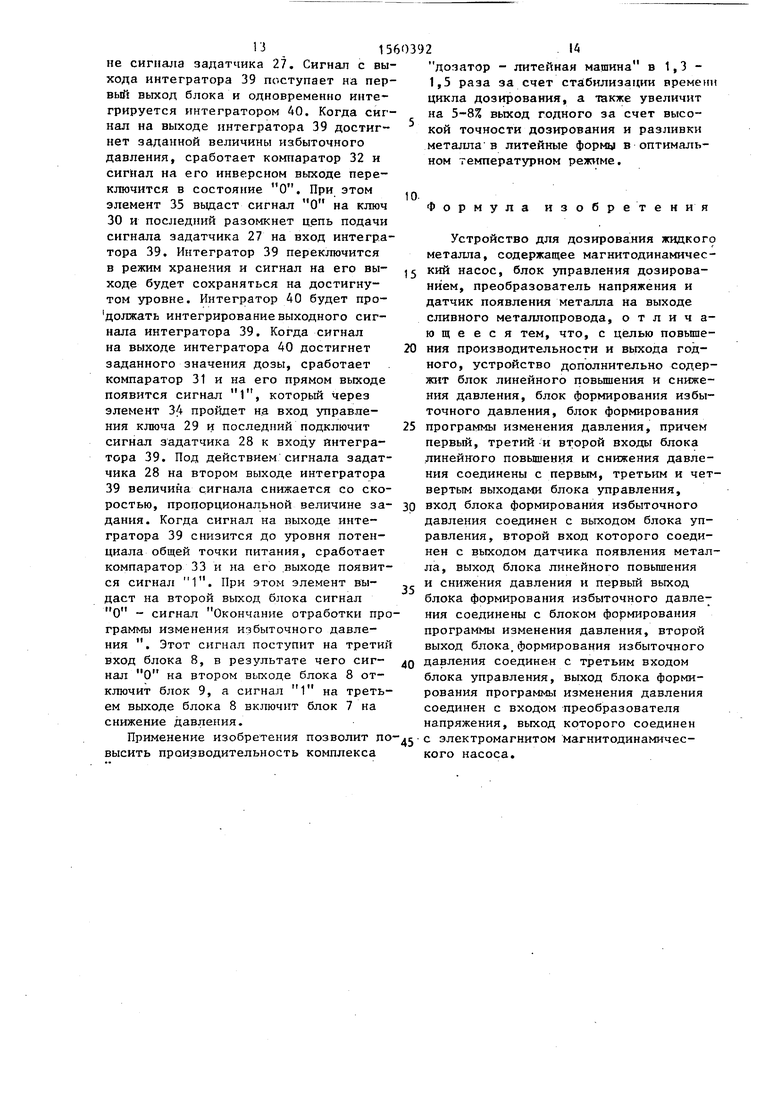
Работа блока 7 происходит следующим образом. В исходном положении первого, третьего и четвертого выходов блока 8 (фиг. 2) на первый, второй и третий входы блока поступают сигналы низкого уровня (О), при этом ключи 24 и 25 на входе интегратора разомкнуты, а ключ сброса интегратора 26 замкнут. Интегратор находится в состоянии сброса и сигнал на его выходе равен нулю. При подаче, с первого и четвертого выходов блока 8 (фиг. 2) на первый и второй входы блока сигналов высокого уровня ключ интегратора 26 размыкает цепь разряда конденсатора, а ключ 24 подключа- ет ко входу интегратора положительный сигнал задатчика скорости подъема давления. При этом интегратор 26 переключается в режим интегрирования и на его выходе появляется линейно нарастающий аналоговый сигнал подъема давления, скорость которого пропорциональна величине положительного сигнала задатчика 21. При переключении сигнала управления на входе в О размыкается ключ 24, который отключает сигнал задатчика 22 от входа интегратора 26. При этом интегратор переходит в режим запоминания и сигнал на его выходе остается на достигнутом уровне. С приходом с третьего выхода блока 8 на третий вход сигнала 1 замыкается ключ 25, который подключает ко входу-интегратора отрицательный сигнал задатчика 23 скорости снижения давления. Интегратор 26 вновь включается в режим интегри5
0
5
рования и на его выходе происходит снижение сигнала со скоростью, пропорциональной величине отрицательного сигнала задатчнка 23. Снижение выходного сигнала интегратора происходит до тех пор, пока на третий вход с третьего выхода блока 8 не поступит сигнал О, после чего ключ 25 ра- зомкнет цепь подачи сигнала от задатчика 23 на вход интегратора, и последний перейдет в режим хранения выходного сигнала. Сброс выходного сигнала интегратора происходит при подаче сигнала О с четвертого выхода блока 8 на второй вход блока. При этом ключ сброса интегратора замкнет цепь разряда конденсатора С.
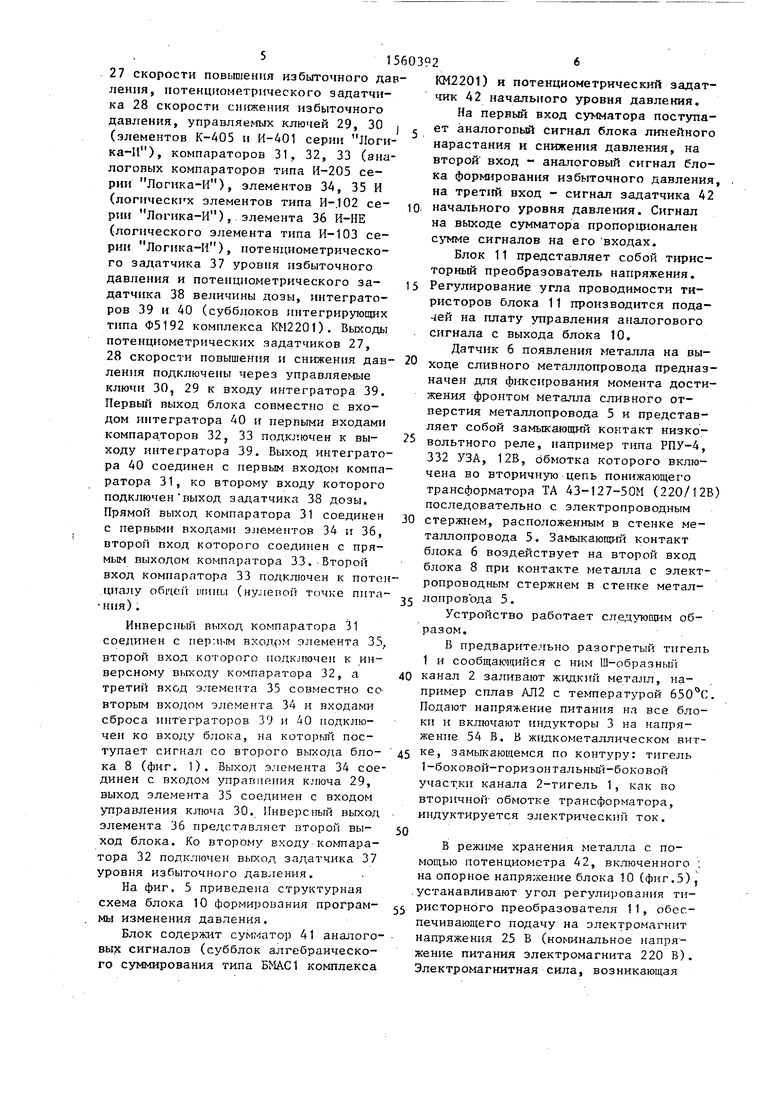
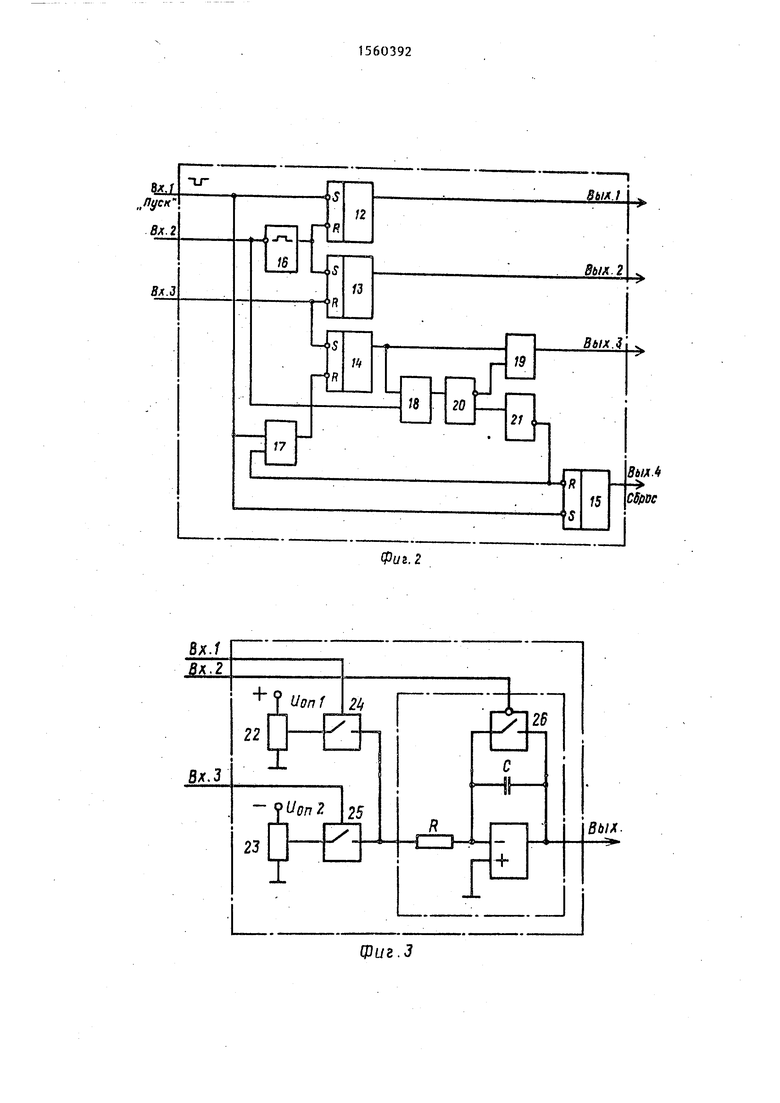
Блок 9 формирования избыточного давления работает следующим образом. В исходном положении на вход блока со второго выхода блока 8 поступает низкий уровень сигнала, соответствующий О. При этом элементы схемы блока находятся в следующем исходном положении:
-интеграторы 39 и 40 находятся в состоянии сброса и сигналы на их выходах имеют потенциал, близкий к
0 потенциалу общей точки питания;
-сигналы на инверсных выходах компараторов 31 и 32 (при условии, что уровни задания на их вторых входах отличны от нуля) соответствуют 1.
5 1
-сигнал на прямом выходе компаратора 33, работающего в режиме нуль- органа, соответствует
-сигналы на выходах элементов 34, 0 35 соответствуют
-ключи 29, 30 находятся в разомкнутом состоянии;
-сигнал на выходе элемента 36 и втором выходе блока соответствует
,с 1
5
Блок начинает отработку программы
изменения избыточного давления при подаче на его вход 1 со второго выхода блока 8. При этом интеграторы
0 39 и 40 переключатся в режим интегрирования. На выходе элемента 35 появится сигнал 1, который поступит на вход управления ключа 30 и последи™ подключит -к входу интегратора 39 сиг5 нал задатчика 27. На выходе интегратора появится линейно нарастающий сигнал, соответствующий величине избыточного давления, скорость изменения которого пропорциональна величине сигнала задатчика 27. Сигнал с выхода интегратора 39 поступает на первый выход блока и одновременно интегрируется интегратором 40. Когда сигнал на выходе интегратора 39 достигнет заданной величины избыточного давления, сработает компаратор 32 и сигнал на его инверсном выходе переключится в состояние О. При этом элемент 35 выдаст сигнал О на ключ 30 и последний разомкнет цепь подачи сигнала задатчика 27 на вход интегратора 39. Интегратор 39 переключится в режим хранения и сигнал на его выходе будет сохраняться на достигнутом уровне. Интегратор 40 будет про- должать интегрирование выходного сигнала интегратора 39. Когда сигнал на выходе интегратора 40 достигнет заданного значения дозы, сработает компаратор 31 и на его прямом выходе появится сигнал 1, который через элемент 34 пройдет на вход управления ключа 29 и последний подключит сигнал задатчика 28 к входу интегратора 39. Под действием сигнала задатчика 28 на втором выходе интегратора 39 величина сигнала снижается со скоростью, пропорциональной величине задания. Когда сигнал на выходе интегратора 39 снизится до уровня потенциала общей точки питания, сработает компаратор 33 и на его выходе появится сигнал 1. При этом элемент выдаст на второй выход блока сигнал О - сигнал Окончание отработки программы изменения избыточного давления . Этот сигнал поступит на третий вход блока 8, в результате чего сигнал О на втором выходе блока 8 отключит блок 9, а сигнал 1 на третьем выходе блока 8 включит блок 7 на снижение давления.
Применение изобретения позволит повысить производительность комплекса
до-затор - литейная машина в 1, 3 - 1,5 раза за счет стабилизации времени цикла дозирования, а также увеличит на 5-8% выход годного за счет высокой точности дозирования и разливки металла в литейные форму в оптимальном температурном режиме.
10
Формула изобретения
Устройство для дозирования жидкого металла, содержащее магнитодинамический насос, блок управления дозированием, преобразователь напряжения и датчик появления металла на выходе сливного металлопровода, отличающееся тем, что, с целью повышения производительности и выхода годного, устройство дополнительно содержит блок линейного повышения и снижения давления, блок формирования избыточного давления, блок формирования
программы изменения давления, причем первый, третий и второй входы блока линейного повышения и снижения давления соединены с первым, третьим и четвертым выходами блока управления,
вход блока формирования избыточного давления соединен с выходом блока управления, второй вход которого соединен с выходом датчика появления металла, выход блока линейного повышения и снижения давления и первый выход блока формирования избыточного давления соединены с блоком формирования программы изменения давления, второй выход блока,формирования избыточного
давления соединен с третьим входом блока управления, выход блока формирования программы изменения давления соединен с входом преобразователя напряжения, выход которого соединен
с электромагнитом магнитодинамичес- кого насоса.
Вх.З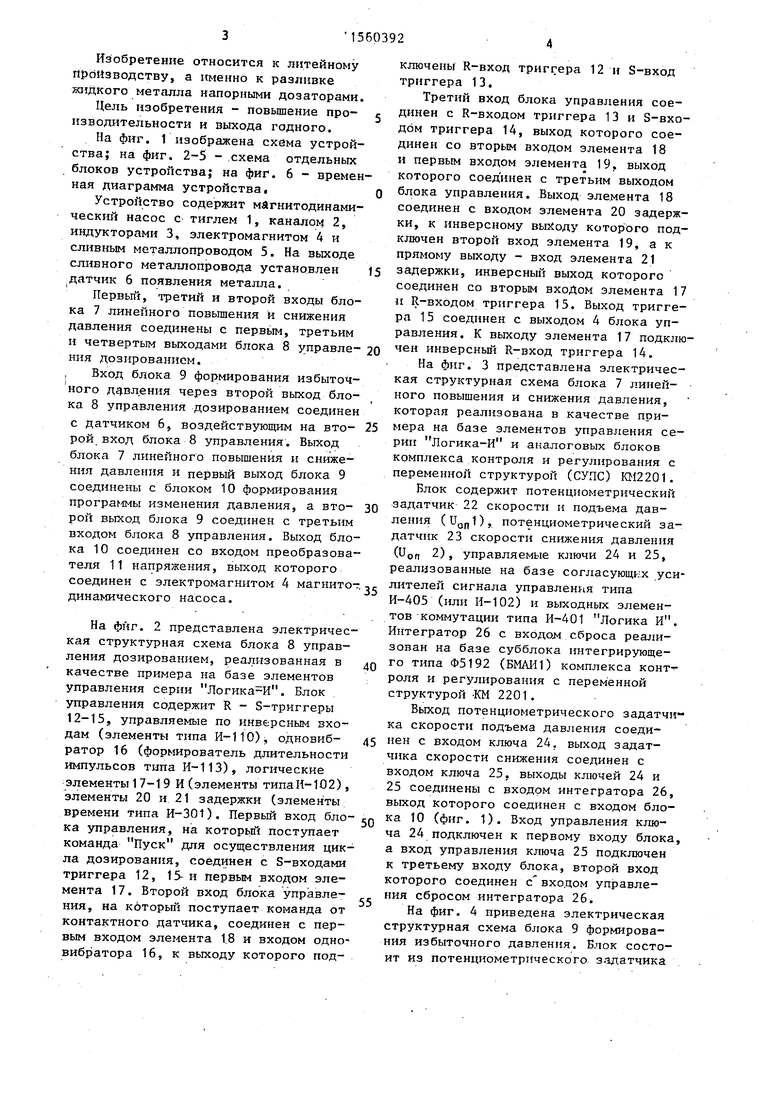
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования температуры полосы в процессе горячей прокатки | 1986 |
|
SU1319960A1 |
| УСТРОЙСТВО ПНЕВМАТИЧЕСКОГО НАГРУЖЕНИЯ ФЮЗЕЛЯЖА САМОЛЕТА ПРИ ПРОЧНОСТНЫХ ИСПЫТАНИЯХ НА РЕСУРС | 2015 |
|
RU2598778C1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления подачей технологических газов в конвертер при донной продувке | 1985 |
|
SU1312102A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Устройство для управления тормозамиСОЕдиНЕННыХ пОЕздОВ пРи иСпыТАНияХ | 1979 |
|
SU802110A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Система управления станом с порезкой проката на ходу | 1976 |
|
SU654934A1 |
| Зарядно-пусковое устройство | 1987 |
|
SU1534632A1 |
| Устройство для контроля времени выключения тиристоров | 1990 |
|
SU1725316A1 |

Изобретение относится к разливке жидкого металла напорными дозаторами. Цель изобретения - повышение производительности и выхода годного. Суть изобретения заключается в том, что устройство содержит магнитодинамический насос, блок 8 управления дозирования, преобразователь 11 напряжения, датчик 6 появления металла, а кроме того, блок 7 линейного повышения и снижения давления, блок 9 формирования избыточного давления, блок 10 формирования программы изменения давления. В связи с тем, что положение контролируемого датчика 6 участка металлопровода 5, а также величина и программа изменения избыточного давления неизменны, величина дозы и продолжительность ее слива для всех циклов дозирования постоянна. 6 ил.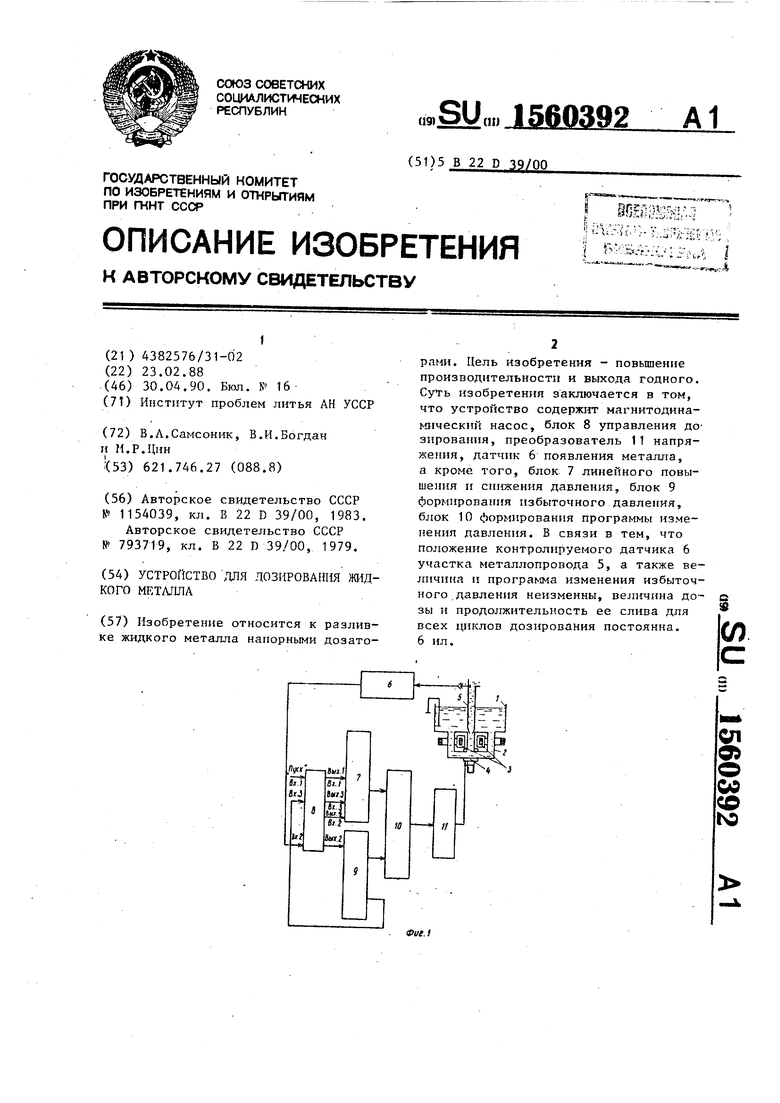
фиг.З
Bx.J Вх.2
Фиг.Ь
Г
Вых.
U
Фиг .5
Фиг. 6
РНУ
t
ty titts B
i
| Устройство для дозирования расплавленного металла | 1983 |
|
SU1154039A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Устройство для управления процессомдОзиРОВАНия жидКиХ МЕТАллОВ | 1979 |
|
SU793719A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
