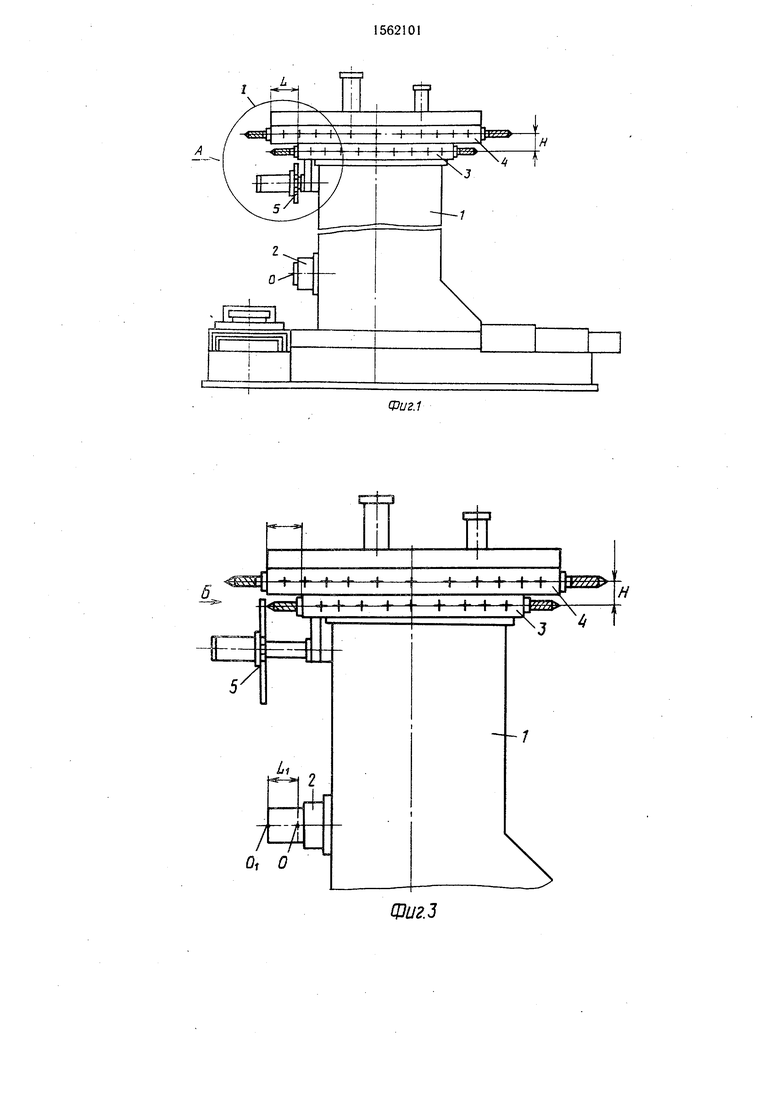
Фиг.2
Изобретение относится к станкостроению и может найти применение в многооперационных станках с автоматической сменой инструмента.
Целью изобретения является сокраще- ние времени смены инструмента.
На фиг. 1 показано положение механической руки многооперационного станка при смене инструмента из нижнего инструментального магазина; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - положение механической руки многооперационного станка при смене инструментов их верхнего инструментального магазина; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - узел I на фиг. 1, при смене инструментов из нижнего инструмен- тального магазина; на фиг. 6 - то же, при смене инструментов из верхнего инструментального магазина.
Мноооперационный станок содержит стойку 1 с горизонтальным шпинделем 2, на которой один над другим установлены два соосных инструментальных магазина в виде барабанов, нижнего 3 и верхнего 4, четы- рехплечую поворотную механическую руку 5 с захватами под инструмент на концах плеч, установленную с возможностью перемещения при помощи двухггазиционного гидроцилиндра по вертикальным направляющим стойки (не показано).
Радиус окружности, описываемой вершиной установленного в нижнем барабане 3 инструмента с максимальным вылетом, меньше радиуса верхнего барабана 4.
Механическая рука 5 содержит два основных плеча 6 и два дополнительных пле
ча /. оси захватов которых расположены в
одной плоскости, перпендикулярно друг другу, причем разница длин основного 6 и дополнительного 7 плеча равно расстоянию Н между плоскостями осей гнезд барабанов 3 и 4.
Оси захватов основных 6 и дополнитель- ных 7 плеч могут быть расположены и в параллельных плоскостях, расстояние S между которыми равно разнице радиусов L верхнего и нижнего барабанов.
Шпиндель 2 выполнен с возможностью перемещения относительно стойки 1 и фиксации в точках О и Oi, соответствующие смене инструментов из нижнего 3 и верхнего 4 барабанов. При этом расстояние между точками О и О| равно L - разнице радиусов верхнего и нижнего барабанов, а позиция смены верхнего 4 и нижнего барабанов совпадают.
Для смены инструментов из верхнего барабана используются основные плечи 6, а из нижнего - дополнительные плечи 7.
0
д 5
0
5
0
5
0
Многооперационный станок работает следующим образом.
При смене инструментов из нижнего инструментального магазина механическая рука 5 по заданной программе поднимается в точку смены, и захватами, расположенными на дополнительных плечах 7, захватывает инструмент, вытаскивает его из магазина, поворачивается на заданный угол и устанавливает инструмент в шпиндель 2, который находится в точке О.
При смене инструментов из верхнего инструментального магазина механическая рука 5 по заданной программе поднимается в ту же точку смены, что и при смене инструментов из нижнего инструментального магазина, и захватами, расположенными на основных плечах 6, захватывает инструмент, вытаскивает его из магазина, поворачивается на заданный угол и устанавливает инструмент в шпиндель 2, который также по заданной программе выдвинулся и зафиксировался в точке О|.
Формула изобретения
1.Мцогооперационный станок, содержащий стойку с горизонтальным шпинделем, расположенные на стойке соосно о,с:лч над другим два инструментальных ,лагэ зкна в виде барабанов с вертикальной осью вращения и гнездами под инструмент, ос:- которых расположены в горизонтальных плоскостях, двуплечую поворотную механическую руку с захватами под инструмент, установленную с возможностью перемещения в. вертикальных направляющих стойки на величину, соответствующую расстоянию между шпинделем и позицией смены верхнего барабана, отличающийся тем, что, с целью сокращения времени смены инструмента, механическая рука снабжена двумя дополнительными плечами, оси захватов которых расположены в одной плоскости перпендикулярно основным плечам, причем радиус верхнего барабана больше радиуса нижнего барабана, а разница длин основного и дополнительного плеча равна расстоянию между плоскостями осей гнезд барабанов, при этом позиции смены для верхнего и нижнего барабанов совпадают, а шпиндель выполнен с возможностью перемещения вдоль своей оси и фиксации в двух точках, расстояние между которыми равно разнице радиусов верхнего и нижнего барабанов.
2.Станок по п. 1, отличащийся тем, что оси захватов основных и дополнительных плеч расположены в параллельных плоскостях, расстояние между которыми равно разнице радиусов верхнего и нижнего барабанов.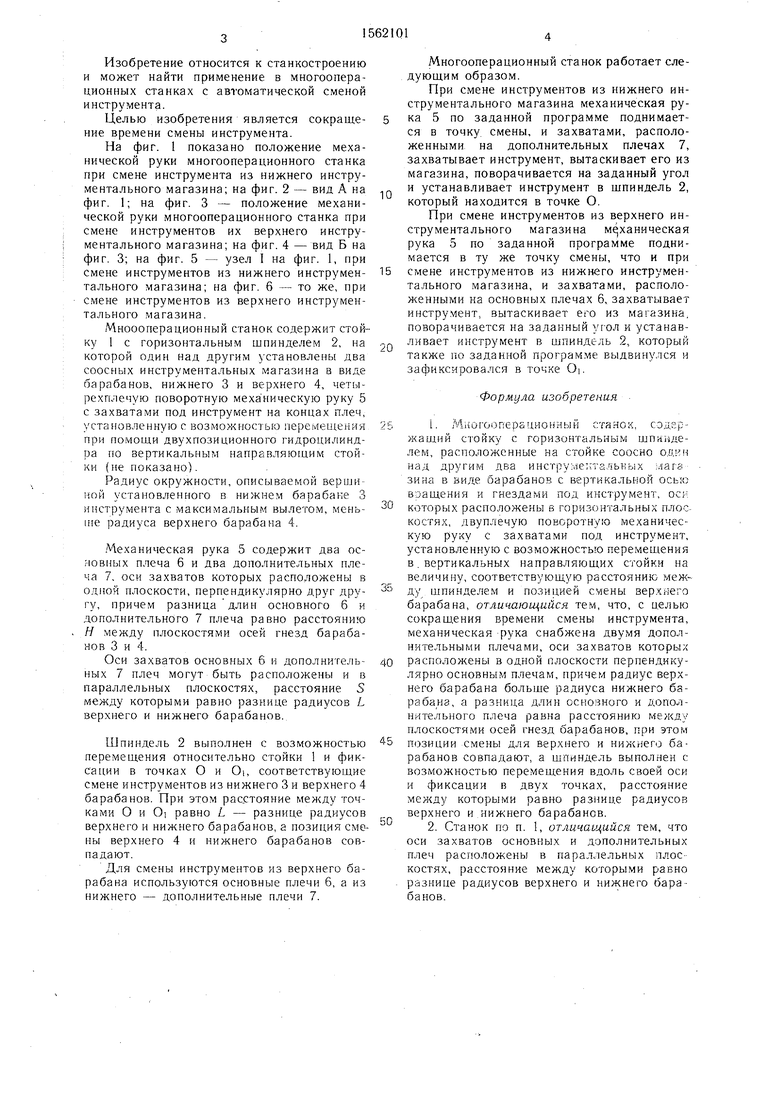
| название | год | авторы | номер документа |
|---|---|---|---|
| Многошпиндельный обрабатывающий станок для одновременной обработки сверлением и (или) фрезерованием нескольких одинаковых деталей с устройствами смены инструментов и для приема заготовок на палеты | 1985 |
|
SU1471937A3 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
| Многооперационный станок с автоматической сменой инструмента | 1983 |
|
SU1133799A1 |
| Многооперационный станок | 1979 |
|
SU880689A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Многоцелевой металлорежущий станок | 1981 |
|
SU1047648A1 |
| Многооперационный фрезерно-расточный станок | 1982 |
|
SU1065134A1 |

Изобретение относится к станкостроению и может найти применение в многооперационных станках с автоматической сменой инструмента. Целью изобретения является сокращение времени смены инструмента. Многооперационный станок содержит стойку 1 с горизонтальным шпинделем, на которой один над другим смонтированы два соосных инструментальных магазина в виде нижнего 3 и верхнего 4 барабанов, четырехплечую поворотную механическую руку 5 с захватами под инструмент на концах плеч, установленную с возможностью перемещения при помощи двухпозиционного гидроцилиндра по вертикальным направляющим стойки. Радиус окружности, описываемой вершиной установленного в нижнем барабане 3 инструмента с максимальным вылетом, меньше радиуса верхнего барабана 4. Механическая рука 5 содержит два основных плеча 6 и два дополнительных плеча 7, оси захватов которых расположены в одной плоскости перпендикулярно друг другу, причем разница длин основного 6 и дополнительного 7 плеча равна расстоянию между плоскостями осей гнезд барабанов 3 и 4. Оси захватов основных 6 и дополнительных 7 плеч могут быть расположены и в параллельных плоскостях, расстояние между которыми равно разнице радиусов верхнего и нижнего барабанов. Шпиндель выполнен с возможностью перемещения относительно стойки 1 и фиксации в точках О и О1, соответствующих смене инструментов из нижнего 3 и верхнего 4 барабанов. Для смены инструментов из верхнего барабана используются основные плечи 6, а из нижнего - дополнительные плечи 7. 1 з.п. ф-лы, 6 ил.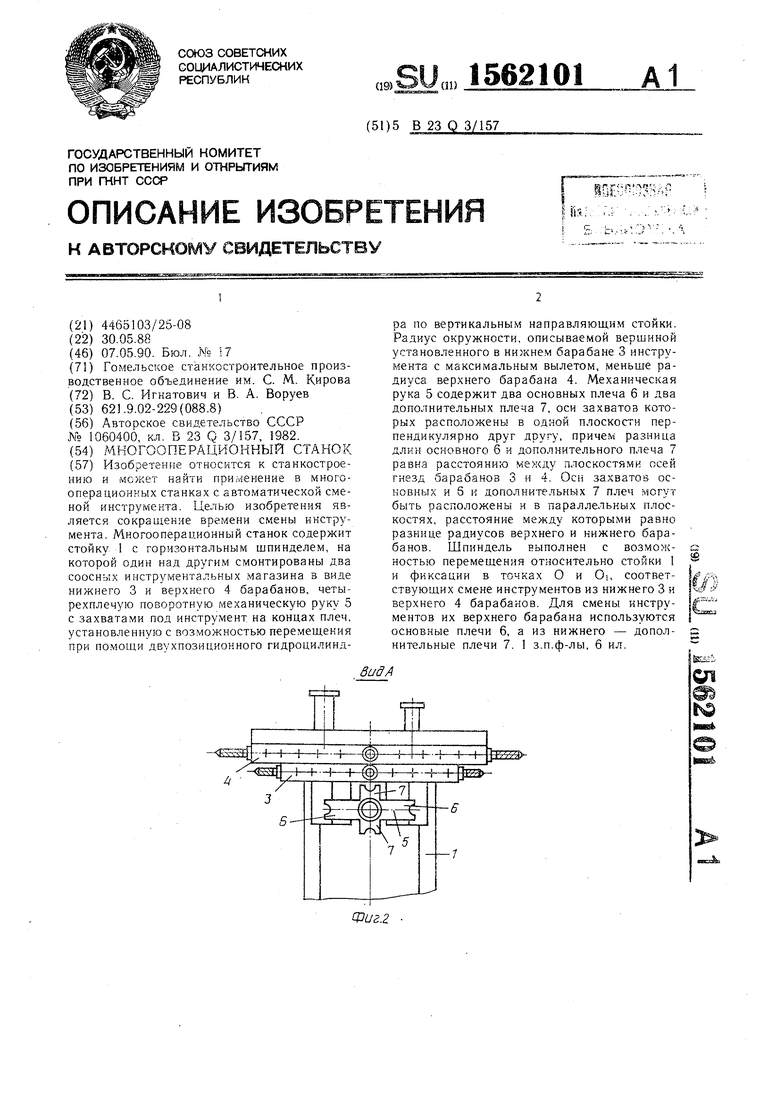
5
I- -t- + +
.р:
7
тцч
Dt О
т
&
н-f + -и//
JXJ
№г5
qiuzM
I
Фиг.5
ОЗиг.6
| Многоцелевой станок | 1982 |
|
SU1060400A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
