t
(21)4444264/25-08
(22)27.06.88
(46) 07.05.90. Бюл. № 17
(71)Рижский завод промышленных роботов, Институт машиноведения
им. А.А.Благонравова АН СССР и Московское станкостроительное производственное объединение Красный Пролетарий
(72)Т.С.Акинфиев, В.А.Беляков, Ю.Д.Клименко, Б.Н.Новогранов, В.Г.Пет- ряков, С.Ф.Сидорко и Б,И.Стожков
(53) 621.229.7(088.8)
(56)Авторское свидетельство СССР № 1329961, кл. В 25 J 9/00, 1987.
С54) РЕЗОНАНСНЫЙ РОБОТ
(57)Изобретение относится к машиностроению, а именно к промышленным
роботам резонансного типа. Целью изобретения является упрощение настройки за счет обеспечения независимой регулировки положения точек позиционирования. Перемещение подвижного звена 1 происходит под действием упругих элементов 3 и 4 и привода, обес- печивающего покрытие потерь на трение, возникающих при движении этого звена. Позиционирование звена осуществляется с помощью фиксаторов 5 и 6, при этом для настройки положения по крайней-мере одной точки позиционирования один из фиксаторов, например фиксатор 5, и конец упругого элемента 3 установлены на основании с возможностью одновременного перемещения и фиксации вдоль направления перемещения подвижного звена 1. 1 ил.
(Я
с: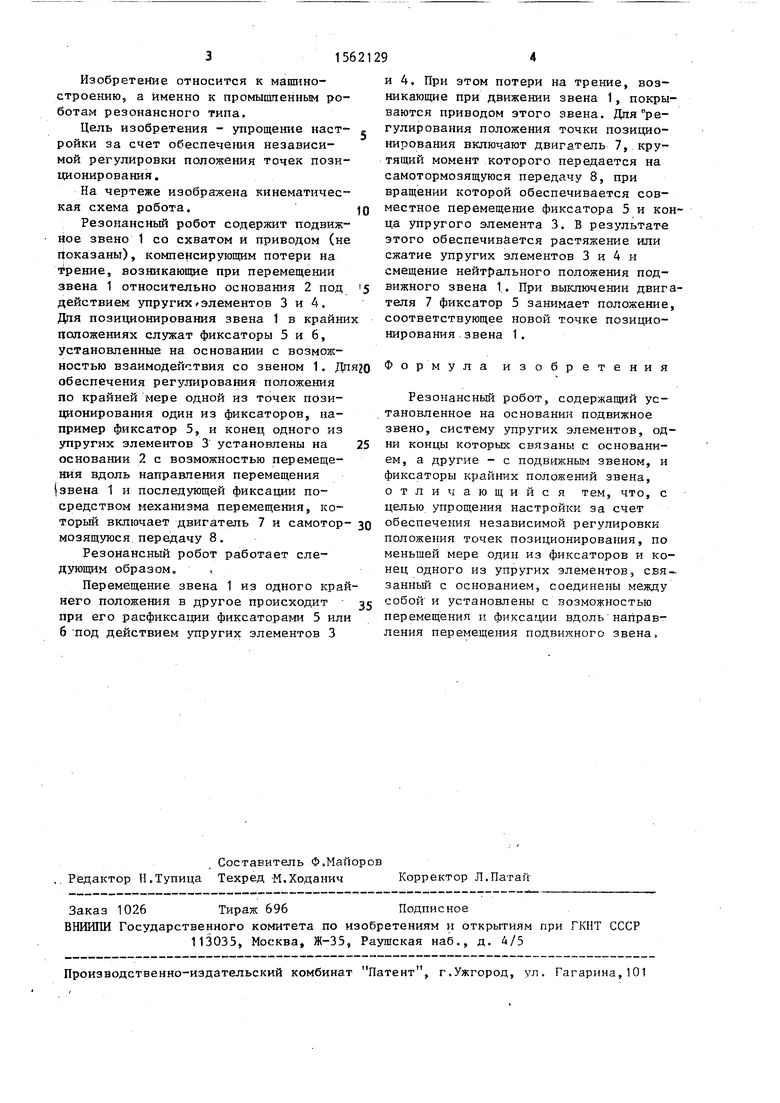
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Способ управления резонансным роботом и устройство для его осуществления | 1985 |
|
SU1329961A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам резонансного типа. Целью изобретения является упрощение настройки за счет обеспечения независимой регулировки положения точек позиционирования. Перемещение подвижного звена 1 происходит под действием упругих элементов 3 и 4 и привода, обеспечивающего покрытие потерь на трение, возникающих при движении этого звена. Позиционирование звена осуществляется с помощью фиксаторов 5 и 6, при этом для настройки положения по крайней мере одной точки позиционирования, один из фиксаторов, например фиксатор 5, и конец упругого элемента 3 установлены на основании с возможностью одновременного перемещения и фиксации вдоль направления перемещения подвижного звена 1. 1 ил.
Л
iLjaj:
8
- X/N/X/V
7/////V/1
/
5Л
Э №
/
/
//////
Изобретение относится к машиностроению, а именно к промышленным роботам резонансного типа.
Цель изобретения - упрощение наст- ройки за счет обеспечения независимой регулировки положения точек позиционирования.
На чертеже изображена кинематическая схема робота.
Резонансный робот содержит подвижное звено 1 со схватом и приводом (не показаны), компенсирующим потери на трение, возникающие при перемещении звена 1 относительно основания 2 под действием упругих элементов 3 и 4. Дня позиционирования звена 1 в крайни положениях служат фиксаторы 5 и 6, установленные на основании с возможностью взаимодействия со звеном 1. Дл обеспечения регулирования положения по крайней мере одной из точек позиционирования один из фиксаторов, например фиксатор 5, и конец одного из упругих элементов 3 установлены на основании 2 с возможностью перемещения вдоль направления перемещения (звена 1 и последующей фиксации посредством механизма перемещения, который включает двигатель 7 и самотор- мозящуюся передачу 8.
Резонансный робот работает следующим образом.
Перемещение звена 1 из одного крайнего положения в другое происходит при его расфиксации фиксаторами 5 или 6 под действием упругих элементов 3
и 4, При этом потери на трение, возникающие при движении звена 1, покрываются приводом этого звена. Для регулирования положения точки позиционирования включают двигатель 7, крутящий момент которого передается на самотормозящуюся передачу 8, при вращении которой обеспечивается совместное перемещение фиксатора 5 и конца упругого элемента 3. В результате этого обеспечивается растяжение или сжатие упругих элементов 3 и 4 и смещение нейтрального положения подвижного звена 1. При выключении двигателя 7 фиксатор 5 занимает положение, соответствующее новой точке позиционирования звена 1.
Формула изобретения
Резонансный робот, содержащий установленное на основании подвижное звено, систему упругих элементов, одни концы которых связаны с основанием, а другие - с подвижным звеном, и фиксаторы крайних положений звена, отличающийся тем, что, с целью упрощения настройки за счет обеспечения независимой регулировки положения точек позиционирования, по меньшей мере один из фиксаторов и конец одного из упругих элементов, связанный с основанием, соединены между собой и установлены с возможностью перемещения и фиксации вдоль направления перемещения подвижного звена,
