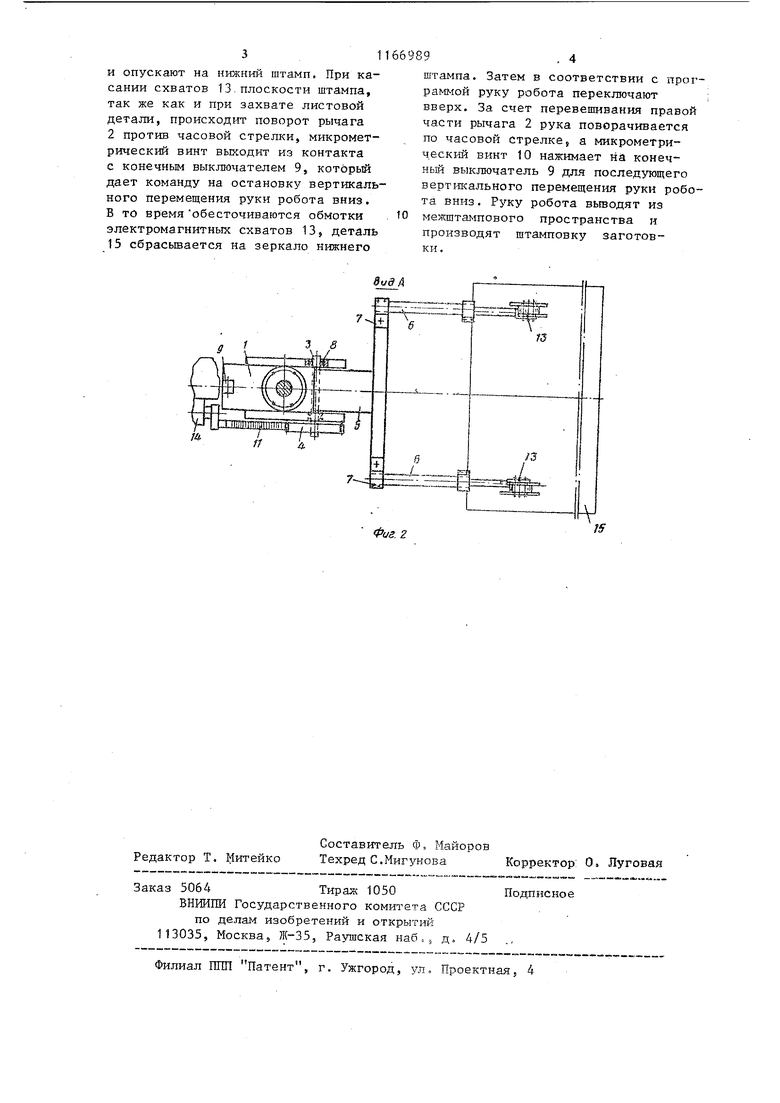
I1 Изобретение относится к автоматизации листовой штамповки с исполь зованием промышленных роботов. Целью изобретения является обеспечение наде5кности работы манипулятора за счет уменьшения сил инерции действующих на заготовку путем выполнения звена несущего схват поворотным , На фиг, 1 показана рука манипуля тора, общий вид; на фиг. 2 - вид А на фиг 1 Рука манипулятора содержит установленное на основании 1 звено, выполненное в виде двуплечего поворотного рычага 2, закрепленного на оси 3 зубчатого колеса 4, одно плечо 5 которого m-ieeT Т-образную форму . Стержни 6 выполнены в виде теле-скопически установленных трубок, чт обеспечивает возможность регулировки их длиныJ и закреплены шарнирно в обоймах 7, что позволяет изменять угловое положение рычагов н горизонтальной плоскости относитель но продольной оси робота Ось 3 установлена в подшипниках качения 8 на основании 1 кисти руки робота. На основании 1 закреплен конечньш выключатель 9 связанньш электрически или пневматически (в зависимости от системы управления), с системой управления роботом, и взаШЮдействующш- с микрометричесКИМ винтом 10, закрепленньп на другом плече рычага 2, Зубчатое колесо 4 кинематически связано с рейкой 11 привода поворота рычага 2; смонтированного на руке робота. На ры чаге 2 установлена регулируемая опо ра 12, позволяюпшя при ее упоре в основание 1 изменять углов.ое положение стержней 6 с двумя электромагнитными схватами 13 в вертикальной плоскости. Ось 3 смонтирована в основании 1 со смещением влево в плоскости чертежа относительно центра тяжести всей системы рычага, обойм, стержней и двух схватов, в результате чего за счет превьшения правой относительно оси 3 части указанной системы микрометрический винт 10 постоянно контактирует с конечным выключателем 9, Рейка 11 снабжена приводом 14,, обеспечивающш-1 ее перемещение и 9 вхождение в зацепление с зубчатым колесом 4. Рука манипулятора работает следующим образом. В соответствии с предусмотренным циклом работы в робото-техническ-ом комплексе для. листовой детали руку робота со схватами 13, угловое положение которых заранее отрегулировано посредством реТулируемой опоры 12 и установкой обойм 7 в соответствующее положение, а длина посредством установки телескопических трубок стержней 6 относительно друг друга, перемещают к стеллажу со стопой листовых деталей. Как только при вертикальном перемещении руки схваты 13 касаются верхней детали, плечо 5 вместе с обоймами 7 и стержнями 6 поворачивают против часовой стрелки. При повороте рычага 2 микрометрический втл 10, закрепленный на нем5 выходят из контакта с конечным выключателем 9s связанным с системой управления роботом. Конечный выключатель 9 дает команду на остановку вертикального перемещения руки робота вниз. Б это время включают питание электромагнитных схватов 13, производят захват ими верхней листовой детали 1 5 В соответствии с заданной программой руку робота перемещают вверх или назад в горизонтальном направлении. Включают привод 14, в результате чего рейка 11 входит в зацепление с зубчать колесом 4, устанавливая рычаг 2 вместе со стержнями 6, схватами 13 и деталью 15 в вертикальное положение. Затем рука робота поворачивается в направлении, например, к штампу пресса, транспортируя деталь в вертикальное положение, что снижает инерционные силы, стремящиеся сдвинуть заготовку относительно схватов, так как yi-ieHbшается значительно расстояние от центра тяжести детали до оси вращения руки робота и исключаются вертикальные прогибы и колебания дета:ш Затем вновь включают привод 14,, который устанавливает схват с деталью в горизонтальное положение, при этом рейка выходит из зацепления с колесом 4. Руку робота перемещают в межштамповое пространство
31
и опускают на нижний штамп. При касании схватов 13.плоскости штампа, так же как и при захвате листовой детали, происходит поворот рычага 2 против часовой стрелки, микрометрический винт выходит из контакта с конечным выклюг1ателем 9$ которьй дает команду на остановку вертикального перемещения руки робота вниз. В то время обесточиваются обмотки электромагнитных схватов 13, деталь 15 сбрасьтается на зеркало нижнего
/4
66989. 4
штампа. Затем в соответствии с программой руку робота переключают вверх. За счет перевешивания правой части рьтага 2 рука поворачивается по часовой стрелкеS а микрометрич.еский винт 10 нажимает на конечньй выключатель 9 для последующего вертикального перемещения руки робота вниз. Руку робота выводят из fO межштампового пространства и производят штамповку заготовки.
Фиг. 2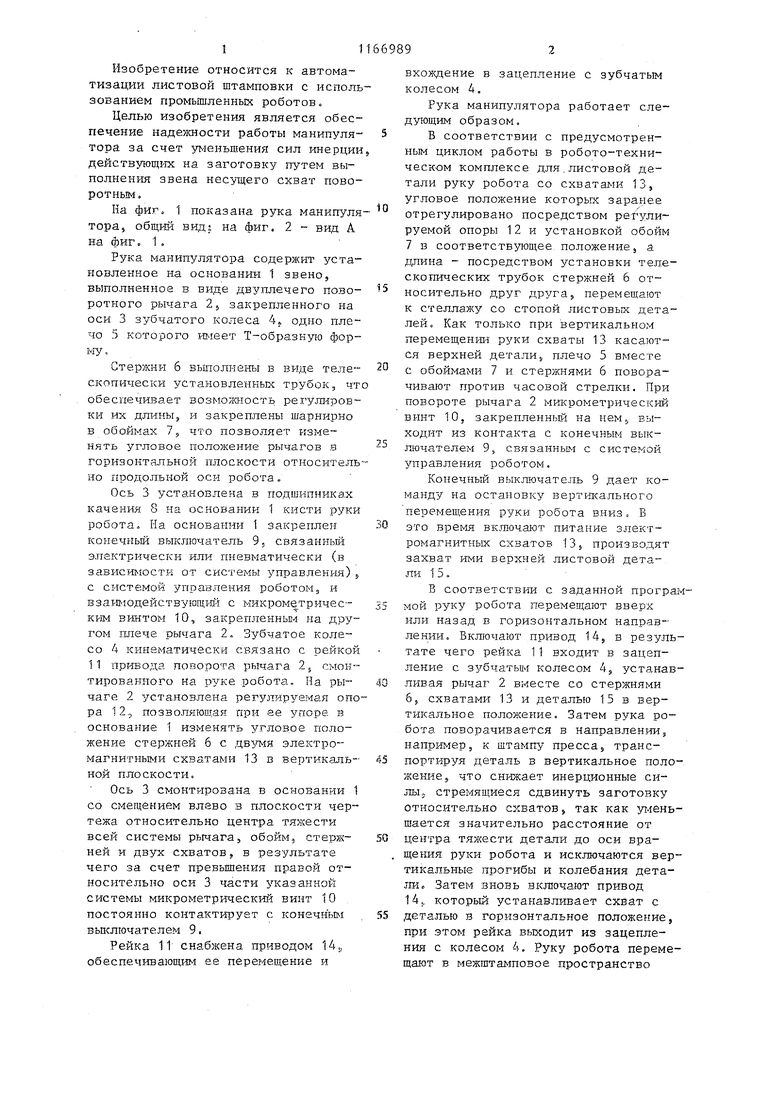
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1163943A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
1. РУКА МАНИПУЛЯТОРА для захвата плоских деталей из стопы, содержащая установленное на основании звено, несущее схват, конечный выключатель, зубчатое колесо и рбйку с приводом ее перемещения, о тличающаяся тем, что, с целью обеспечения надежности работы манипулятора за счет уменьшения сил инерции, действующих на заготовку при повороте руки, она снабжена дополнительным схватом и двумя стержнями, а звено выполнено в виде двуплечего рычага, закрепленного на оси зубчатого колеса, одно плечо которого имеет Т-образную форму, при этом рейка установлена на основании с возможностью зацепления с зубчатым колесом, конечный выключатель установлен на основании с возможностью взаимодействия с другим плечом рычага, стержни установлены на концах полки Т-образного плеча рычага, а схваты расположены на этих стержнях. 2. Рука манипулятора по п. 1, отличающаяся тем, что стержни шарнирно связаны с рычагом.
| Юревич Е.И | |||
| и др | |||
| Устройство промьшленньсх роботов | |||
| Л.: Машиностроение, 1980, с | |||
| СПОСОБ СОСТАВЛЕНИЯ ЗВУКОВОЙ ЗАПИСИ | 1921 |
|
SU276A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
