Фиг.З
ключения связаны между собой кинематической связью, выполненной в виде последовательно соединенных между собой посредством тяг 11-14 трех уз- лов. Первый узел предназначен для преобразования перемещений рычага 8 управления в два независимых параллельно направленных возвратно-поступательных движения тяг 11 и 12. Вто- рой узел предназначен для передачи движения тяг 11 и 12, находящихся на передней полураме9 на тяги 13 и 14, находящиеся на задней полураме. Третий узел преобразует одно из па- раллельно направленных возвратно-ло- ступательных движений (например, движение тяги 13)„во вращательное движение вала 15э которое передается рычаг гу 10 переключения. Одновременно с этим рычагу 10 переключения передается также возвратно-поступательное движение через толкатель 47, на ко- торый воздействует Г-образный двуплчий рычаг, связанный с тягой 14. Второй узел может быть выполнен в двух вариантах В первом варианте перемещение тяг 11 и 12 передается тягам 13 и 14 через Г-образные двуплечие рычаги 30,31,36 и 37 с горизонтальными осями вращения и диски 24 и 25, размещенные на оси 5 с возможностью перемещения вдоль нее. Во втором варианте узел выполняется в виде гибких реверсивных тросов. В автодорожном шасси обеспечивается переключение передач при его маневрровании, когда изменяется расстояние между рычагами 8 и 10, т.е. при складывании полурам. 2 з.п. ф-лы, 4 ил„


| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для дистанционного ручного управления коробкой передач | 1988 |
|
SU1523413A1 |
| Дистанционное управление коробкой передач землеройно-транспортной машины с шарнирно-сочлененной рамой | 1988 |
|
SU1523414A1 |
| Дисковый узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно сочлененной рамой | 1988 |
|
SU1593998A1 |
| Шарнирный узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно сочлененной рамой | 1988 |
|
SU1593999A1 |
| Дисковый узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно-сочлененной рамой | 1989 |
|
SU1684117A1 |
| Рычажный механизм управления для автодорожного шасси с ходоуменьшителем | 1990 |
|
SU1729840A1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2326773C2 |
| Снегоочиститель роторный | 1989 |
|
SU1752590A1 |
| Универсальное колесное шасси для ремонта и содержания автомобильных дорог | 1988 |
|
SU1539118A1 |


Изобретение относится к транспортному машиностроению, в частности к автодорожным шасси с шарнирно-сочлененной рамой. Цель изобретения - повышение надежности механического переключения передач при расположении коробки передач и кабины с рычагом управления на разных полурамах. Автодорожное шасси содержит колесный движитель, шарнирно-сочлененную раму, состоящую из соединенных между собой посредством шарнира передней и задней полурам. На передней полураме установлены двигатель и кабина с расположенным внутри нее рычагом 8 управления коробкой 9 передач, которая размещена на задней полураме. На коробке 9 передач имеется рычаг 10 переключения, перемещающийся в двух взаимно перпендикулярных направлениях. Рычаг 8 управления и рычаг 10 переключения связаны между собой кинематической связью, выполненной в виде последовательно соединенных между собой посредством тяг 11 - 14 трех узлов. Первый узел предназначен для преобразования перемещений рычага 8 управления в два независимых параллельно направленных возвратно-поступательных движения тяг 11 и 12. Второй узел предназначен для передачи движения тяг 11 и 12, находящихся на передней полураме, на тяги 13 и 14, находящиеся на задней полураме. Третий узел преобразует одно из параллельно направленных возвратно-поступательных движений (например, движение тяги 13) во вращательное движение вала 15, которое передается рычагу 10 переключения. Одновременно с эти рычагу 10 переключения передается также возвратно поступательное движение через толкатель 47, на который воздействует Г-образный двуплечий рычаг 42, связанный с тягой 14. Второй узел может быть выполнен в двух вариантах. В первом варианте перемещение тяг 11 и 12 передается тягам 13 и 14 через Г-образные двуплечие рычаги 30, 31, 36 и 37 с горизонтальными осями вращения и диски 24, 25, размещенные на оси 5 с возможностью перемещения вдоль нее. Во втором варианте узел выполняется в виде гибких реверсивных тросов. В описанном автодорожном шасси обеспечивается переключение передач при его маневрировании, когда изменяется расстояние между рычагами 8 и 10, т.е. при складывании полурам. 2 з.п. ф-лы, 4 ил.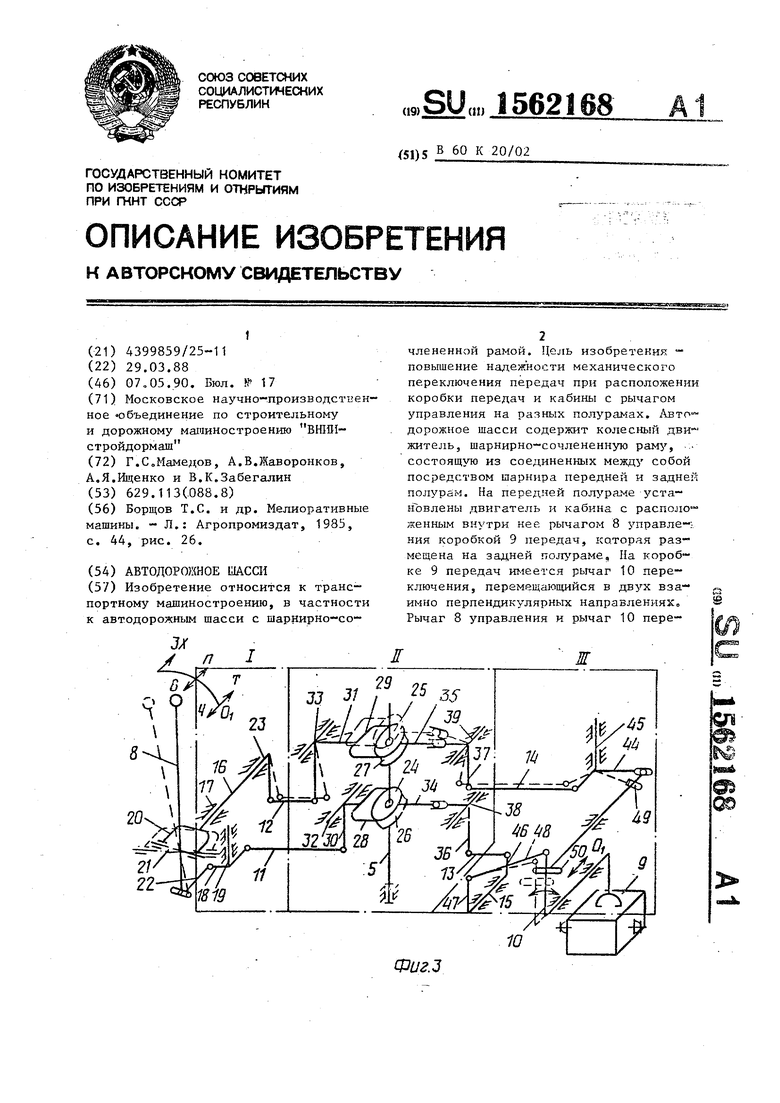
Изобретение относится к транспорт- ному машиностроению, в частности к автодорожным шасси с тарнирно-сочле- ненной рамойо
Цель изобретения повышение надежности механического переключения передач при расположении коробки передач и кабины с рычагом управления на разных полурамах,
На фиг. 1 изображено автодорожное шасси с шарнирно-сочлененной рамой; на фиг. 2 - то же, вид сверху; на фиг, 3 - вариант выполнения кинематической связи рычагов управления с рычагом переключения коробки передач; на фиг. 4 - связь рычагов с рычагом управления, выполненная гибкой.
Автодорожное шасси с шарнирно-сочлененной рамой включает колесный / движитель 1, шарнирно-сочлененную раму,,. состоящую из передней 2 и задней 3 полурам, которые соединены между собой посредством шарнира 4 с вертикальной осью 5. На передней по- лураме 2 установлен двигатель 6 и кабина 7 с размещенным внутри нее рычагом 8 управления. На задней полураме 3 установлена коробка 9 передач с рычагом 10 ее переключения. Рычаг 8 управления кинематически связан с рычагом 10 переключения коробЧ ки 9 передач. Кинематическая связь рычагов 8 и 10 выполнена в виде трех
«
0
j
5
последовательно соединенных между собой посредством тяг 11-14 трех узлов . Первый узел расположен на передней полураме 2 и предназначен для преобразования перемещений рычага 8 управления в два независимых параллельно направленных возвратно-поступательных движения тяг 11 и 12. Второй узел расположен над шарниром 4 соединения полурам 2 и 3 и предназначен для передачи движения тяг 11 и 12 с передней полурамы 2 на тяги 13 и 14, связывающие этот узел с третьим узлом, расположенным на задней полураме 3. Третий узел служит для преобразования одного из параллельно направленных возвратно-поступательных движений, например тяги 14, во вращательное движение вала 15. Первый узел выполнен в виде вала 16, установленного в опорах 17с возможностью вращения, и Г-образного двуплечего рычага 18 с вертикальной осью 19 вращения. Вал 16 через вилку 20 соединен с осью 21 качания рычага 8 управления, а Г-образный двуплечий рычаг 18 одним своим плечом кинематически связан через тягу 22 с нижним концом рычага 8 управления. Свободный конец вала 16 через рычаг 23 соединен с тягой 12, а свободное плечо F-образного двуплечего рычага 18 соединено с тягой 11. Тяги 11 и 12.
5
параллельны между собой и могут под воздействием рычагов 23 и 18 совершать независимые возвратно-поступательные движения.
Тяги 11 и 12 кинематически связы- вают первый узел с вторым узлом.
Второй узел может быть .выполнен в двух вариантах. При первом варианте выполнения второй узел (фиг. 3) содержит два диска 24 и 25 с пазами 26 и 27 на их торцовых поверхностях. Диски 24 и 25 размещены на вертикальной оси 5 с возможностью перемещения вдоль нее. Диски 24 и 25 охвачены вилками 28 и 29, концы которых входя соответственно в пазы 26 и 21 дисков 24 и 25. Вилки 28 и 29 жестко соединены с одним из плеч соответственно Г-образных двуплечих рычагов 30 и 31, другие концы рычагов 30 и 31 шарнирно соединены с тягами 11 и 12„ Кроме того, Г-образные двуплечие рычаги 30 и 31 снабжены горизонтальными осями 32 и 33 вращения. К дискам 24 и 25 прикреплены промежуточные элементы 34 и 35, которые взаимодействуют с другой парой Г-образных двуплечих рычагов 36 и 37, снабженных горизонтальными осями 38 и 39 враще- ния. Рычаги 36 и 37 шарнирно соединены также соответственно с тягами 13 и 14, связывающими второй и третий узлы.
Второй узел может быть также выполнен в виде двух гибких реверсив- ных тросов 40 и 41, работающих как на растяжение, так и на сжатие (фиг. 4). В этом случае тросы 42 и 4 соединяют между собой соответственно тяги 11-14.
Третий узел выполнен аналогично первому узлу и содержит вал 15 и Р-образный двуплечий рычаг 44 с вертикальной осью 45 вращения. Вал 15 через рычаг 46 соединен одним своим концом с тягой 13, а другим - через рычаг 47 с тягой 48, шарнирно соединенной с рычагом 10 переключения коробки 9 передаче Рычаг 10 переключе
ния совершает два независимых движения: качательное и возвратно-поступательное. Тяга 46 передает рычагу 10 качательное движение. Возвратно-поступательное перемещение рычаг 10 совершает под действием толкателя 49, который через кулису 50 воздействует на размещенные внутри нее рычаг 10, другим концом толкатель 49 шарнирно
п ,. 0 5 ,,
5
5
0
5
686
соединен с Г-образным двуплечим рычагом 44. С целью обеспечения работо- - способности кинематической связи направляющие вала 16, осей 19, 32 и 33 закреплены на передней полураме 2 автодорожного шасси, а направляющие осей 38, 39 и 45 и вала 15 - на задней полураме 3.
Автодорожное шасси работает следующим образом.
Начало движения шасси осуществляется путем запуска двигателя 6 и включением с помощью рычага 8 соответствующей передачи 9 коробки. Для включения выбранной передачи необходимо рычаг 8 управления переместить в нейтральном направлении 0-0, в положение, соответствующее выбранной передаче. Фиксатор (не показан) коробки 9 передач зафиксирует рычаг 8 управления в выбранном положении. Затем рычаг 8 переводится в положение включения соответствующей передачи. Для этого рычаг 8 поворачивают относительно оси 21. Передача движений от рычага 8 управления к рычагу 10 переключения при первом варианте выполнения кинематической связи происходит следующим образом. Перемещением рычага 8 в направлении О-0 через ось 21 воздействуют на вилку 20, ко- торая поворачивает вал 16, который в свою очередь через рычаг 23 перемещает тягу 12. Тяга 12 воздействует на дно плечо Г-образного двуплечего рычага 31 и поворачивает его на оси 33. При этом, поворачиваясь, рычаг 31 увлекает за собой жестко связанную с ним вилку 29, которая своими концами воздействует на диск 25, заставляя его перемещаться вдоль оси 5. Диск 25 увлекает за собой жестко связанный с ним промежуточный элемент 35, который поворачивает Г-образный двуплечий рычаг 37. Последний через тягу 14 воздействует на Г-образный двуплечий рычаг 42, поворачивая его на вертикальной оси - 45 вращения. Рычаг 44 перемещает толкатель 49. При этом кулиса 50 воздействует на рычаг 10 переключения, перемещая его в направлении 0-0 нейтрали коробки 9.
При повороте рычага 8 управления в положение одной из включенных передач З.Х,П,В,Т,4 происходит вращение рычага 8 вокруг оси 21. В этом случае конец рычага 8 через тягу 22 воздействует на Г-образный двуплечий рычаг 18, поворачивая его по вертикаль- ной оси 19. Рычаг 18 перемещает тягу 11, которая воздействует на Г-образный двуплечий рычаг 30 с горизонтальной осью 32 вращения. Далее вилка 28 воздействует на-диск 24, который посредством жестко связанного с ним промежуточного элемента 34 поворачивает Г-образный двуплечий рычаг 36. Последний через тягу 13 и рычаг 46 поворачивает вал 15, который через рычаг 47 и тягу 48 переводит рычаг 10 переключения в положение, соответствующее включению требуемой передачи.
Во втором варианте исполнения (фиг о 4) перемещение от тяги 12 к тяге 14 и от тяги 11 к тяге 13 передается посредством гибких реверсивных, т,е, одинаково работающих на растяжение и сжатие тросов 42 и 43. Этот вариант является с точки зрения конструктивного исполнения более простым, однако, сами реверсивные тросы отечественной промышленностью не выпускаются, конструкция их сложна и они требуют очень точной регулировки длины всех звеньев кинематической связи между рычагом 8 управления и рычагом 10 переключения. При этом, обладая упругостью, гибкие реверсивные тросы не передают руке водителя ощущение от фиксаторов положения рычага 10 переключения, что затрудняет выбор нужного положения по нейтрали рычага 8 управления, затрудняя тем самым включение передач,
V
При повороте автодорожного шасси происходит складывание полурам 2 и 3 на некоторый угол (это положение шасси изображено пунктирной линией на фиг. 2). Однако это не нарушает нормальной работы кинематической связи рычагов 8 и 10, хотя расстояние между ними изменяется. Сохранение работоспособности происходит благодаря возможности поворота вилок 2 и 29, охватывающих диски 24 и 25 относительно последних. При этом кинематическая связь рычагов 8 и 10 полностью сохраняет свою работоспособность, .
15621688
обеспечивая возможаостью нормального включения передачи и при маневрировании автодорожного шасси, т.е. при сложенном положении полурам 2 и 3,
10
15
20
25
30
35
40
45
50
Формула изобретения
и рычаг переключения передач, кинематически связанный с рычагом управления, отличающееся тем, что, с целью повышения надежности механического переключения передач при расположении коробки передач и кабины с рычагом управления на разных полурамах, кинематическая связь рычага управления с рычагом переключения передач выполнена в виде симметрично расположенных на разных полурамах параллельных тяг и Г-образных двуплечих рычагов, установленных на осях вращения, и снабжена узлом передачи движения с одной полурамы на другую, установленным над шарниром соединения полурам, причем тяга одной полурамы кинематически связана с рычагом управления, а другой с рычагом переключения передач.
5
0
5
0
5
0
5
0
Формула изобретения
и рычаг переключения передач, кинематически связанный с рычагом управления, отличающееся тем, что, с целью повышения надежности механического переключения передач при расположении коробки передач и кабины с рычагом управления на разных полурамах, кинематическая связь рычага управления с рычагом переключения передач выполнена в виде симметрично расположенных на разных полурамах параллельных тяг и Г-образных двуплечих рычагов, установленных на осях вращения, и снабжена узлом передачи движения с одной полурамы на другую, установленным над шарниром соединения полурам, причем тяга одной полурамы кинематически связана с рычагом управления, а другой с рычагом переключения передач.
6
6 8
Фиг.1
2 4
Фиг. 2
z
Редактор В.Вугренкова
Составитель В.Яковлев
Техред М.Ходанич Корректор Э.Лончакова
Заказ 1028
Тираж 419
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
№
ФигМ
Q
Подписное
| Борщов Т.С | |||
| и др | |||
| Мелиоративные машины | |||
| - Л.: Агропромиздат, 1985, с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
