Изобретение относится к строительству и дорожному машиностроению, в частности к системам управления коробками передач землеройно-транспортных машин с шарнир- но-сочлененной рамой.
Цель изобретения - упрощение управления путем обеспечения постоянства кинематической связи управляюш,его и управляемого органов при изменяюш,емся угле передачи усилия.
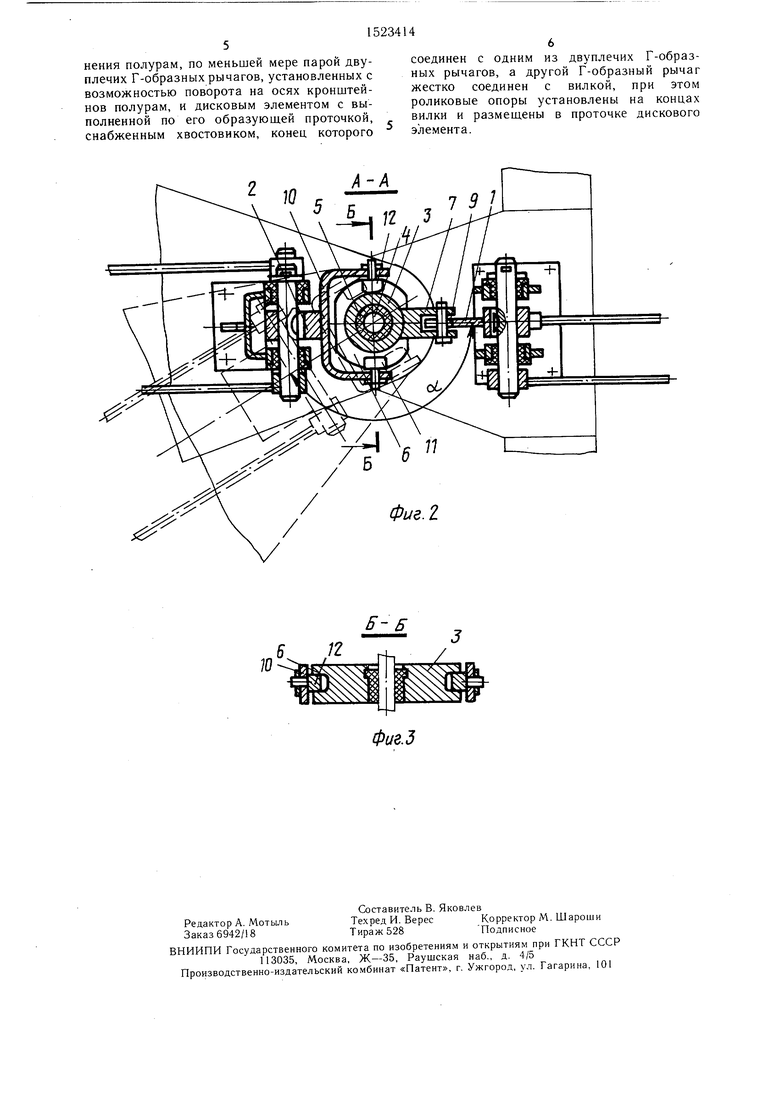
На фиг. 1 показана система дистанционного управления коробкой передач земле- ройно-транспортной машины с шарнирно- сочлененной рамой, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Дистанционное управление коробкой пе- редач содержит по меньшей мере пару двуплечих Г-образных .рычагов 1, 2 и соответ- ствуюший им дисковый элемент 3, который размешен на цилиндрическом стержне 4 с возможностью перемещения вдоль него. С этой целью дисковый элемент 3 снабжен втулкой 5, которая при перемещениях дискового элемента 3 скользит по поверхности цилиндрического стержня 4. Тело дискового элемента 3 выполнено с проточкой 6 на его торцовой поверхности и снабжено хвостовиком 7, который соединен с двуплечим Г-образным рычагом 1 посредством пальца 8, размещенного в пазу 9 рычага 1. Второй двуплечий Г-образный рычаг 2 жестко соединен с вилкой 10, на концах которой установлены роликовые опоры 11 и 12, размещенные в проточке 6. Двуплечие Г-образ- ные рычаги 1 и 2 установлены с возможностью вращения соответственно на осях 13 и 14, которые в свою очередь установлены в кронштейнах 15 и 16. При этом кронштейн 15 жестко прикреплен к задней .полураме 17, а кронштейн 16 - к передней полураме 18. Полурамы 17 и 18 соединены между собой посредством шарнира 19 и образуют щарнирно-сочлененную раму зег лерой- но-транспортной машины (не показана). Шарнирно-сочлененные рамы являются наиболее характерными для землеройно- транспортных машин. Для обеспечения соосности цилиндрического стержня 4 и шарнира 19 они выполнены за одно целое, что суше- ственно повышает надежность в работе. Двуплечие Г-образные рычаги 1 и 2 связаны соответственно с тягами 20 и 21, которые соединены с управляюшим и управляемым органами (не показаны). В качестве управляющего органа может быть, например, рычаг управления, установленный в кабине землеройно-транспортной мащины, а в качестве управляемого органа - рычаг переключения передач, установленный на коробке. При необходимости передачи от одного управляющего органа двух и более управляющих воздействий или же передачи управляющих воздействий от двух и более управляющих органов к соответствующим им
управляемым органам узел системы дистанционного управления должен содержать пропорциональное количество двуплечих Г-образных рычагов и дисковых элементов. На фиг. 1 изображен узел для передачи двух управляющих воздействий, состоящий из двух одинаковых дисковых элементов 2, размещенных на одном цилиндрическом стержне 4 и соответствующих им парам двуплечих Г-образных рычагов 1, 2 и 1,2, взаимодей0 ствующих между собой соответственно посредством вилок 10 и хвостовиков 7. Узел системы дистанционного управления коробкой передач землеройно-транспортной машины с щарнирно-сочлененной рамой
5 работает следующим образом.
При перемещении управляющего органа (рычага управления) происходит перемещение связанной с ним тяги 21, которая воздействует на двуплечий Г-образный рычаг 2, поворачивая его вокруг оси 14. При этом,
0 поворачиваясь, рычаг 2 увлекает за собой жестко связанную с ним вилку 10, которая роликовыми опорами 11 и 12, размещенными в проточке 6, воздействует на дисковый элемент 3, перемещая последний вдоль
, цилиндрического стержня 4 вверх или вниз в зависимости от направления перемещения тяги 21. Перемещаясь вдоль цилиндрического стержня 4, дисковый элемент 3 своим хвостовиком 7 воздействует на двуплечий Г-образный рычаг 1, поворачивая его вокруг
0 оси 13. При этом рычаг 1 увлекает за собой тягу 20, которая воздействует на управляемый орган. Дналогичным образом происходит передача управляющего воздействия через тягу 21 на тягу 20.
5 При повороте транспортного средства происходит складывание передней 18 и задней 17 полурам на некоторый угол (фиг. 2, сложенное положение полурам представлено пунктиром). В этом случае роликовые опоры 11 и 12 и дисковый элемент 3 беспрепят- ственно поворачивается относительно друг друга, сохраняя свое положение на цилиндрическом стержне 4.
Формула изобретения
Дистанционное управление коробкой передач землеройно-транспортной мащины с щарнирно-сочлененной рамой, содержащее управляющий и управляемый органы, установленные на полурамах,кинематически связанные друг с другом, отличающееся тем, что, с целью упрощения управления путем обеспечения постоянства кинематической связи управляющего и управляемого органов при изменяющемся угле передачи усилия, оно снабжено вилкой с роликовыми опорами,
кронштейнами с осями, один из которых установлен на передней, а другой - на задней полурамах, цилиндрическим стержнем, выполненным за одно с осью шарнира сочленения полурам, по меньшей мере парой двуплечих Г-образных рычагов, установленных с возможностью поворота на осях кронштейнов полурам, и дисковым элементом с выполненной по его образуюш.ей проточкой, снабженным хвостовиком, конец которого
соединен с одним из двуплечих Г-образных рычагов, а другой Г-образный рычаг жестко соединен с вилкой, при этом роликовые опоры установлены на концах вилки и размеш,ены в проточке дискового элемента.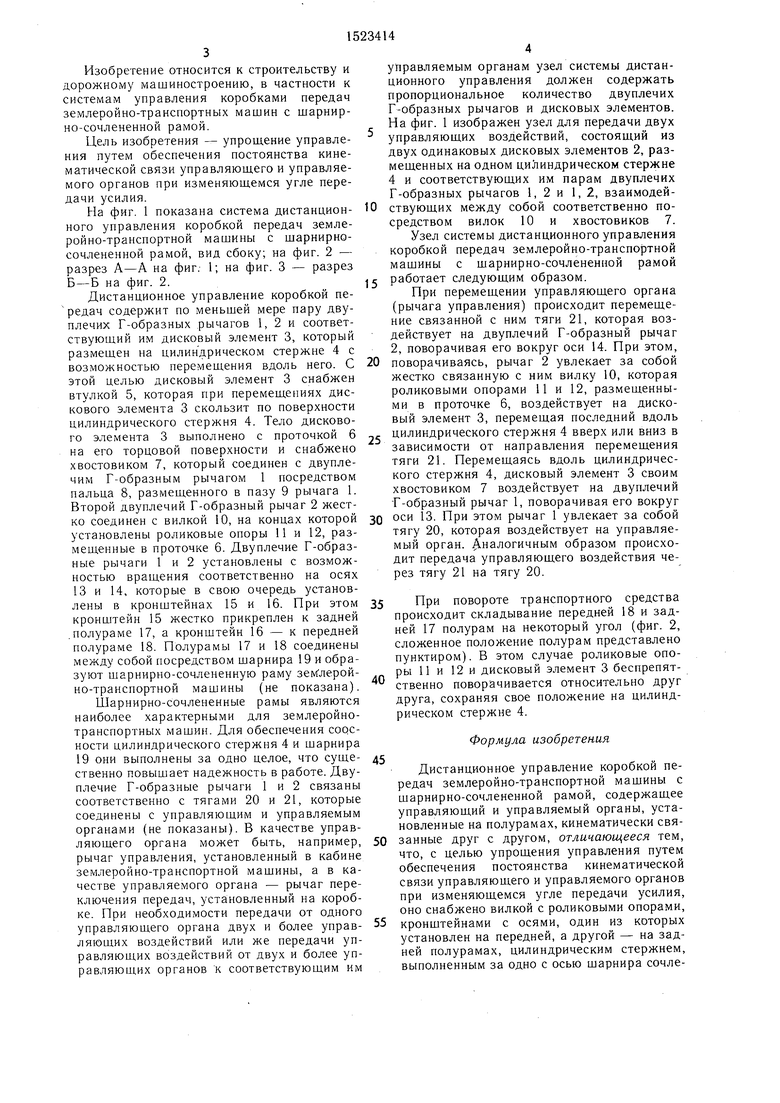
| название | год | авторы | номер документа |
|---|---|---|---|
| Дисковый узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно сочлененной рамой | 1988 |
|
SU1593998A1 |
| Дисковый узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно-сочлененной рамой | 1989 |
|
SU1684117A1 |
| Механизм для дистанционного ручного управления коробкой передач | 1988 |
|
SU1523413A1 |
| Шарнирный узел системы дистанционного управления коробкой передач землеройно-транспортной машины с шарнирно сочлененной рамой | 1988 |
|
SU1593999A1 |
| Автодорожное шасси | 1988 |
|
SU1562168A1 |
| Универсальное колесное шасси для ремонта и содержания автомобильных дорог | 1988 |
|
SU1539118A1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1992 |
|
RU2034961C1 |
| Источник сейсмических колебаний | 1984 |
|
SU1272294A1 |
| Трансмиссия шасси для ремонта и содержания дорог | 1988 |
|
SU1627427A1 |
Изобретение относится к строительному и дорожному машиностроению, в частности к системам управления коробками передач землеройно-транспортных машин с шарнирно-сочлененной рамой. Цель изобретения - упрощение управления путем обеспечения постоянства кинематической связи управляющего и управляемого органов при изменяющемся угле передачи усилия. При перемещении управляющего органа, например рычага управления (на чертеже не показан), происходит перемещение связанной с ним тяги 21, которая воздействует на двуплечий Г-образный рычаг 2, поворачивая его вокруг оси 14. Рычаг 2 увлекает за собой вилку 10, которая воздействует на дисковый элемент 3, перемещая его вдоль цилиндрического стержня 4. Цилиндрический стержень 4 выполнен заодно с шарниром 19, что обеспечивает их строгую соосность. Перемещаясь вдоль цилиндрического стержня 4, дисковый элемент 3 своим хвостовиком 7 воздействует на двуплечий Г-образный рычаг 1, который перемещает тягу 20 в заданном направлении. Тяга 20 воздействует на управляемый орган. Оси 13 и 14 вращения двуплечих Г-образных рычагов 1 и 2 закреплены соответственно на задней 17 и передней 18 полурамах землеройно-транспортной машины. Узел системы дистанционного управления обеспечивает свободное переключение управляемого элемента при складывании полурам 17 и 18 за счет свободного относительного перемещения дискового элемента 3 и вилки 10. 3 ил.
Б Б
Фие.З
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ, НАПРИМЕР, РАЗДАТОЧНОЙ КОРОБКОЙ АВТОМОБИЛЯ | 0 |
|
SU176494A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
