Фиг.1
9 15 14 11
i / i /
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU831516A1 |
| Захват | 1975 |
|
SU682366A1 |
| Устройство для загрузки деталей | 1976 |
|
SU860995A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Устройство для подрезки соединительных концов бурильных труб | 1975 |
|
SU733865A1 |
| Устройство для подачи заготовок | 1976 |
|
SU573306A1 |
| Автооператор | 1979 |
|
SU844218A1 |
| Устройство для зажима тонкостенных деталей | 1984 |
|
SU1255365A1 |
| Манипулятор | 1988 |
|
SU1537510A1 |
| Магнитное переключаемое устройство для закрепления деталей | 1989 |
|
SU1692803A1 |
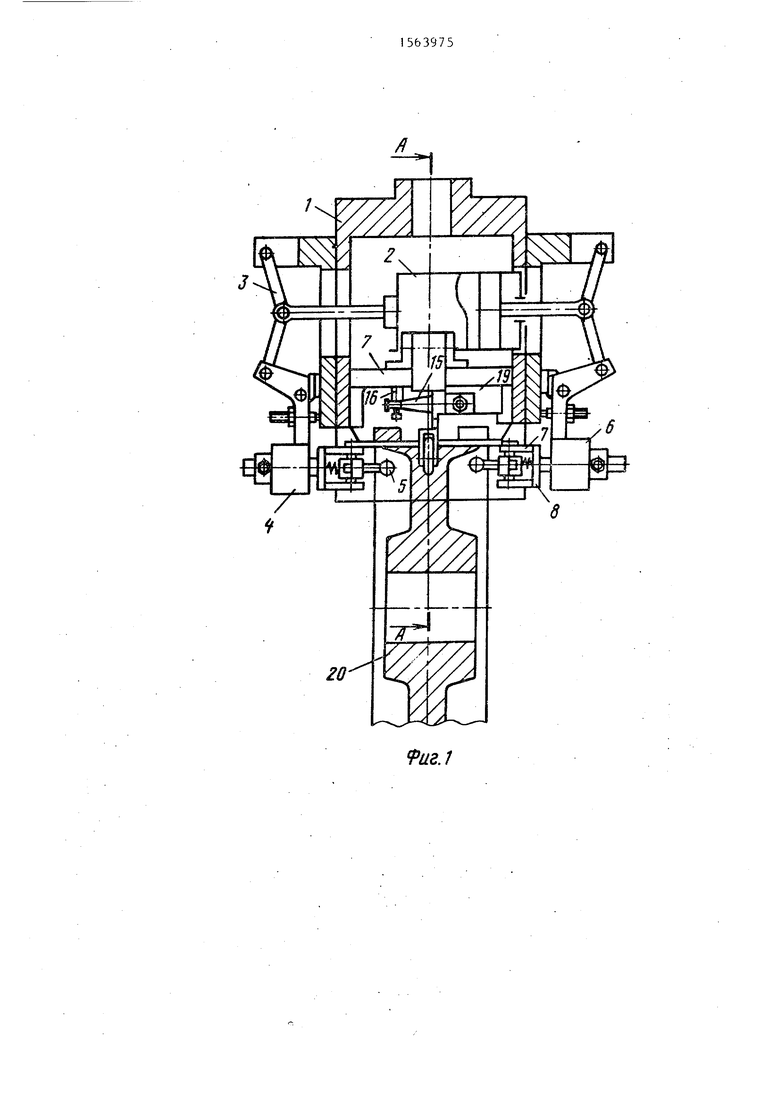
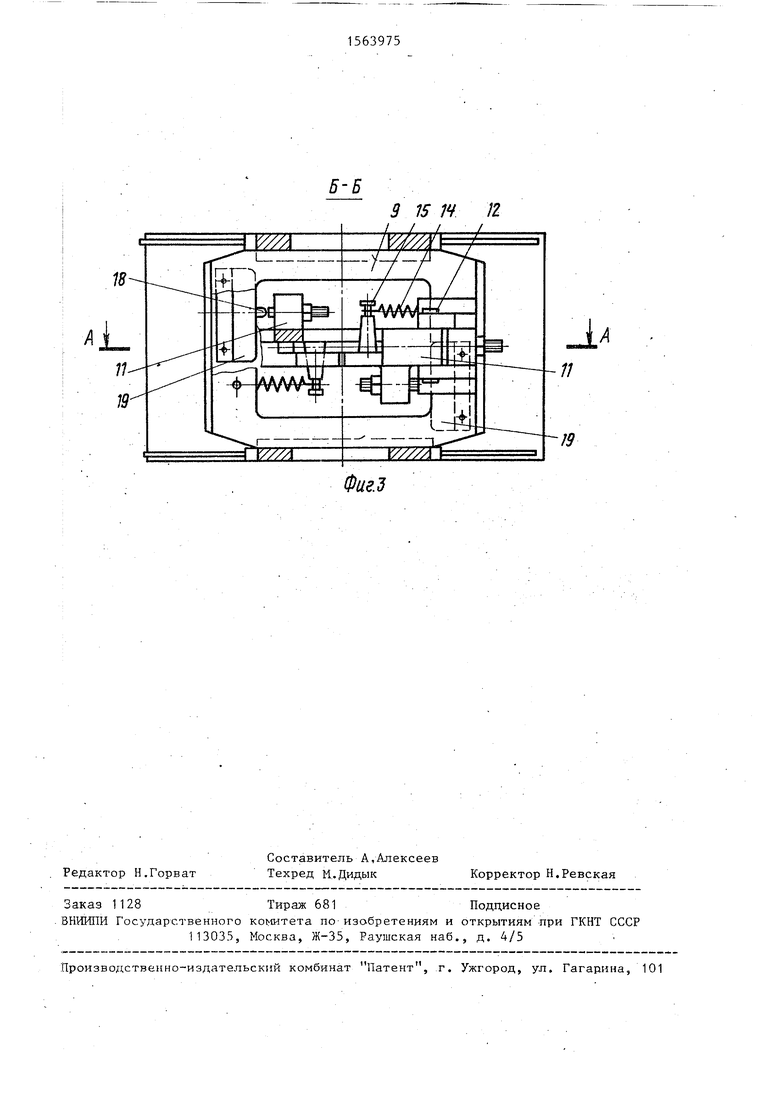
Изобретение относится к машиностроению, в частности к станкостроению. Целью изобретения является повышение надежности и расширение технологических возможностей. В исходном положении рычаги 11 занимают определенное угловое положение. При опускании схвата на деталь ролики 13 контактируют с поверхностью детали и расходятся, при этом рычаги 11, поворачиваясь на осях 12, преодолевают сопротивление пружин. Концы винтов отходят от датчиков 19, дающих сигнал о наличии детали в схвате. Схват останавливается, причем между деталью и полупризмами 10 имеется зазор. После этого деталь подхватывается захватными элементами и поджимается к полупризмам 10 корпуса 1. 3 ил.
Фие.З
| Схват робота | 1983 |
|
SU1117205A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
