оси 9 с лимбами 10, иеремещая perVvTHpyeмыеПолупризмы 7 до касания с деталью 12. Фиксируют иоложение полупризм 7 и эксцентрикового вала 9 с лимбом 10, затягивая гайку 11.
Напротив стрелки лимба ианосят риску, соответствующую наибольшему оптимальному размеру зажимаемой детали.
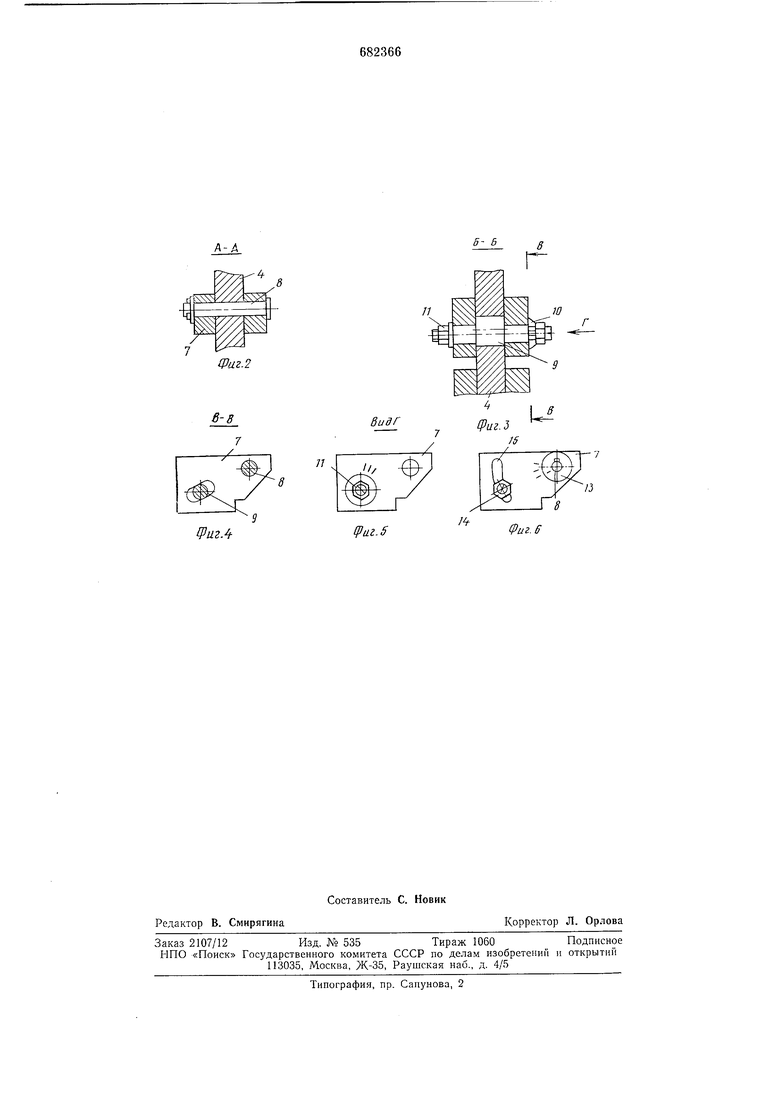
Эксцентриситет оси 9 рассчитан таким образом, чтобы обеспечить зажим оиределеиного диапазона деталей 12 при фиксированном положении их продольной оси. Положения стрелки лимба, соответствующие зажиму различных оптимальных размеров, отмечаются щтрихами на щкалах иолупризм 7 (фиг. 5).
В другом варианте предлагаемого захвата поворот регулирз емой призмы 7 (фиг. 6) производят вокруг цилиндрической оси 8, имеющей 13, и фиксируют нужное положение гайкой 14, сидящей на цилиндрической оси, размещенной в криволинейном пазу 15 полупризмы, очерченном по дуге окружности из центра оси 8. В остальном настройка захвата аналогична настройке по первому варианту.
Захват работает следующим образом.
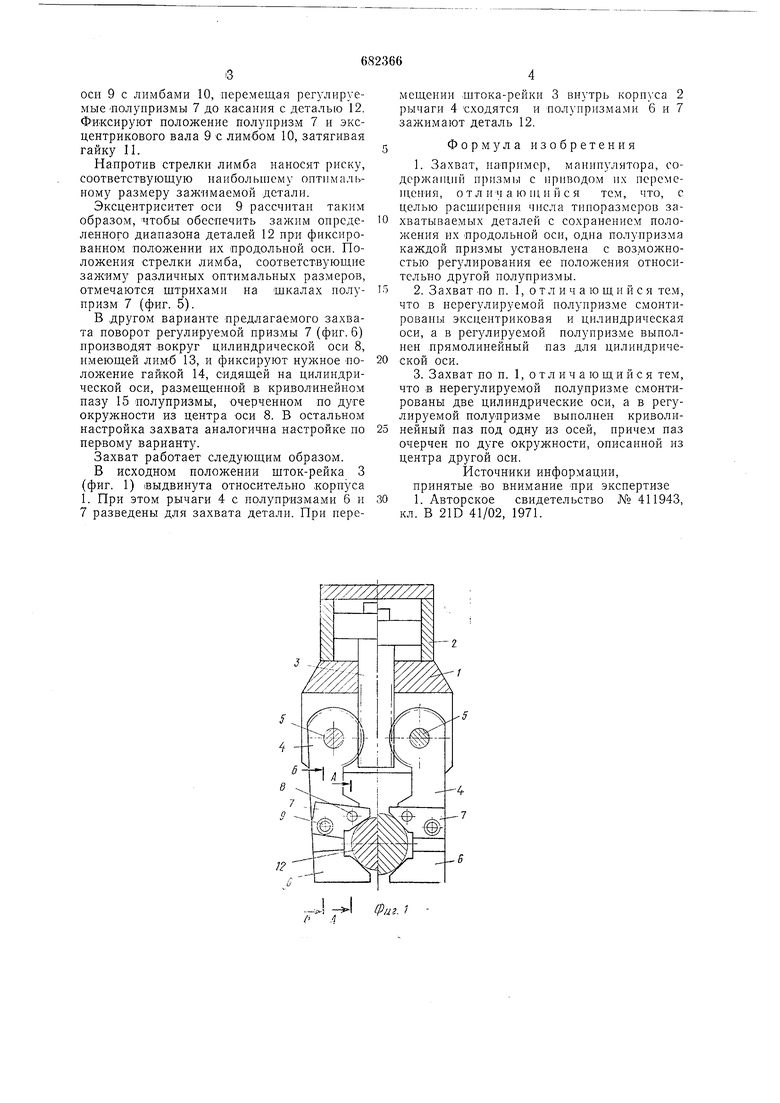
В исходном положении шток-рейка 3 (фиг. 1) выдвинута относительно корпуса 1. При этом рычаги 4 с полупризмами 6 и 7 разведены для захвата детали. При перемещении штока-рейки 3 внутрь корпуса 2 рычаги 4 сходятся и полуиризмами 6 и 7 зажимают деталь 12.
Формула изобретения
1.Захват, например, манипулятора, содержаии1Й призмы с приводом пх перемеП1,ения, о т л и ч а ю nui и с я тем, что, с целью расширения числа типоразмеров захватываемых деталей с сохранением положения их продольной оси, одна полупризма каждой призмы установлена с возможностью регулирования ее полол ения относительно другой иолупризмы.
2.Захват по п. 1, о тл и ч а ю щ и и с я тем, что в нерегулируемой иолуиризме смонтированы эксцентриковая и цилиндрическая оси, а в регзлируемой полупризме выполнен прямолинейный паз для цилиндрической оси.
3.Захват по п. 1, отличающийся тем, что в нерегулируемой полупризме смонтированы две цилиндрические оси, а в регулируемой полупризме выполнен криволинейный паз под одну из осей, причем паз очерчен по дуге окружности, описанной из центра другой оси.
Источники информации, принятые ВО внимание при экспертизе 1. Авторское свидетельство № 411943, кл. В 21D 41/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1977 |
|
SU704756A1 |
| Автооператор | 1979 |
|
SU844218A1 |
| Захват манипулятора | 1977 |
|
SU764976A1 |
| Автомат для фрезерования пазов | 1981 |
|
SU1000177A1 |
| Захват манипулятора | 1986 |
|
SU1414634A1 |
| Приспособление для определения линий реза на поверхности деталей типа труб | 1980 |
|
SU1006112A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для приварки цилиндрических деталей | 1979 |
|
SU863271A1 |
| Приспособление к металлорежущему станку для фрезерования пазов под твердый сплав в буровых коронках | 1985 |
|
SU1449247A1 |
| УСТРОЙСТВО ЦЕНТРИРОВАНИЯ И ЗАГРУЗКИ С УЗЛОМ ПРИЕМА И ПОДАЧИ ЧУРАКА В ЗОНУ ЦЕНТРОВКИ И МЕХАНИЗМОМ СИНХРОНИЗАЦИИ | 2008 |
|
RU2378107C1 |
..;.1 Фц2, 1
/Л
А-Д
/
Фаг.2
6-8
ВидГ
(Риг. 5
П
PU2.
JS
-т
г5
/3
XI
/
(риг. 6
Ipaz.S
