Изобретение относится к робототехнике и может быть использовано при созда сии дистантщонных копирую- манипуляторов, вьшапняюи -тх опе- ращш с объект aMHj на которые :ла.гю-- жены внешние связи,.
Изобретение является ycoBe-pzie si- стйованием устройства для управления дистанционным маннпулятороь-; по авт.. св. № 1120278
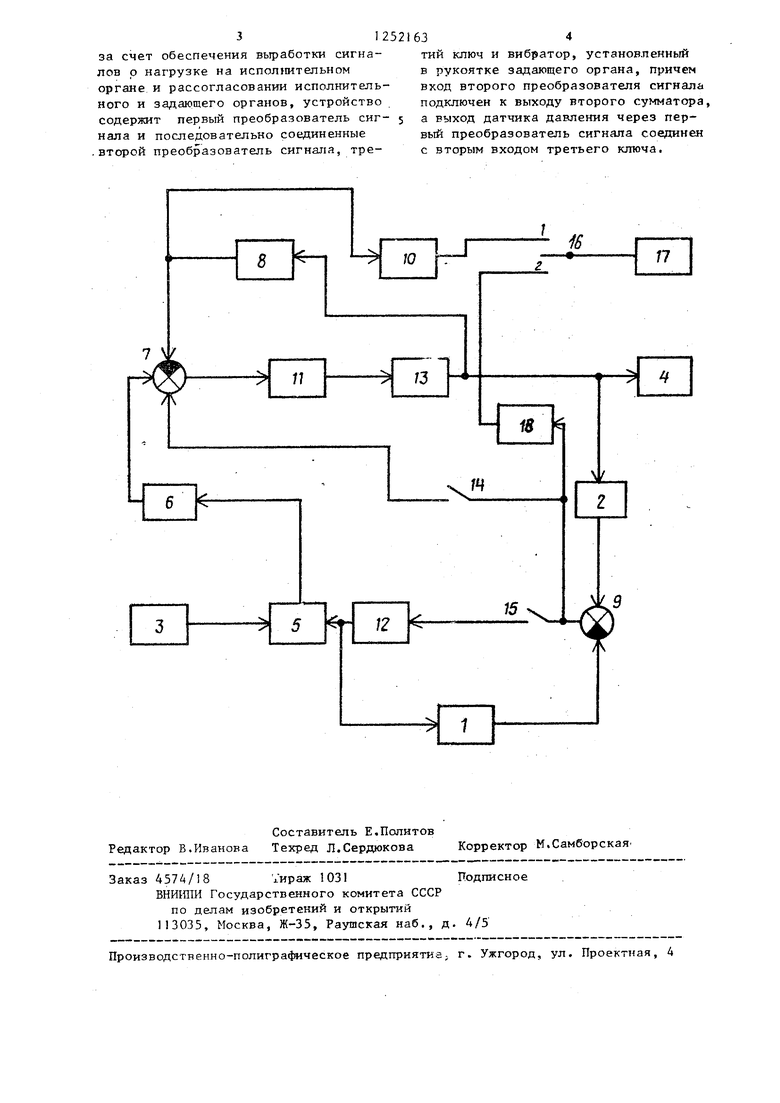
Целью изобретения является рас-- Ьгирение функционапькых воаножностек; „устройства за счет обеспечкга-ш выработки сигналов о нагрузке на ис- нолнительном органе и рассогласовании исполнитепьного и задагощего органов при работе с гунструментом На че ртеже представлена функцио - нальная схема устройства.
Устройство содержит 1 угла задающего органа; датчик 2 уг.па исполнительного opraHia, згдлн дий О р- ган 3, иснолнктельньш оргш-; 4, упругий элемент 5, датчик 6 момантг, первьп. сумматор 7. датчик В давле-- ния, второй сумматор 9, первьл-i лре- образователь 10 сигнала, з гектро- гидроусилитель- 11 , ,1гр01гривод 12,, гидропривод 13,;, первый., в гэпон и третий ключи 14., 5 к 16 соотват- ственно, вибратор s, втсзроя лреобра зоваталь 18 сю-палг;,
У с гр ой с ТВ о р .3 с от а ет с.п . образом.
В ре)симе Инструмент оператор ттереводит ключ 5 в положение Быкл ключ li в по.пожекне Вьлк.л ., ключ 16 в положение I . зад,.кпдс:тч- органа в зтом пет,, гак электрогфивод 12 отключен, При BOS-действии оператора со :,а
дающего органа 3 на упруг гтй эле:-1еп-г- 5 сигнал с датчика & момента, пропорциональный дефоркациьз упругого элемента 5, поступает на й ерзьп: .оц нерног о сумматора 7, на в орой его вход постунает сигпаг с 1:5 давления, пропорциональный мог-имггу нагрузки на исполнитапьнО -: органе 4, Снт нал с выхода первого сугчматора 7, пронорциопальный разности- моментов , постунает через последоБа ельнс сг-в- днненньш э,:1ектрогидроусилитеагь i 1 на-гидропривод КЗ, в полостях -сото- рого соз,дается. перепах , давотений,, -чО торый вызьгоает перемегп.ение выходиorr вала гидродпигателя 13., связанного ; испо,П Штельньм органом 4 :; ,о cKopcurvT 32
протгорнргог- альной разности моментов ji:a задающем и испо.пиительном органах 3 и -4с Одновременно си1 нал с датчика 1 ДсГг5ления поступает на вход первого преобразователя О, с его выхода че-- рез ршюч 16 этот сиг Н ап., частота ко- -1 (v,;oj o пропср,дион,дльна моменту нагрузки на ис1топ)дательном органе 4, 1Юступает на вибратор 17, который преобразует его Б механические коле ба шя (щшючки в рукоятке) , воздей- ст:в:,/юшие на руку оператора. Чем больше -гастота ко,п,ебаний, тем больше момент нагрузки на иснолнительком ор- :г,:ат;е 4 . Та.ким образом оператор полу - 5-1 йт гагформацию о зепичине момента -;а 5i:crsorniHT ел ьном органе 4 при вы- п ;,:1иенки рабочих онерат);ий,
Дня перехода из рехшма Инстру- мен г в основной работы Копи- Г овашге необуэдямо сог:- ассвать ноло- жеГгИе гадающего органа 3 с положением :;1СГ аанительного органа 4, Для этого устанавливаг 1 ся реяа- к Согласование. 3 режиме Согласование оператор
ререлодит ключ 14 в положение Вкл., к, i5 в положение Выкл., ключ 16 соед-лняется с выхол.ом 19. Задающий о-;-.ган 3 остается )1(ным. Гид.ро- привод 13,. управляемый сигналом, пропорциональным разности углов за- .апюте.го У исгхшнктельного органов 3 и 4, который пост упает с выхода :о тор о г о с vMH; t т о р а 9 ,, о б е с п е чк в а е т с;)1, 1асование их поло/кения, Олновре- меино ЭТОТ разностный сигнап через гк/слещовательно соединенный второй пйеобразоватодть 18,. :к:люч 16 посту- ..ler на вибратор i ,, жоторый пре- образует его в механические колебя- fiiiji, воздействующие на руку операто- ::: ;и Чтобь не произошло резкого движения задающего органа 3, оператор, тгрегсде чел перейти в режим Когшро нaj -ие ., ,::(олже11 доаздаться ;, когда
iacTora колебаний будет минимальна/ П;,;реход в режк Копирование кэ |:ежчма Согласование осуществляется переводом ключа 1А в положение ВыкЛ- З, ключа 15 и положение Вкл., ;-,1-;;пча- 16 Б нейтральное положение,
й г; р м у ,г а изобретения Устройство ,; управления дистан- ггионным манипулятором по авт. ев ; i i /0278, о т л и ч а fo ш, е е с я г ем,, ЧТО;, с Д(глью расамрения функ- хиойапьньгг возможностей устройства
312521
за счет обеспечения вьфаботки сигналов р нагрузке на исполнительном органе и рассогласовании исполнительного и задающего органов, устройство содержит первый преобразователь сиг- 5 нала и последовательно соединенные .второй преобразователь сигнала, тре634
тий ключ и вибратор, установленный в рукоятке задающего органа, причем вход второго преобразователя сигнала подключен к выходу второго сумматора, а выход датчика давления через первый преобразователь сигнала соединен с вторым входом третьего ключа.
ю
.i6
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1987 |
|
SU1565679A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
Изобретение относится к области робототехники и может быть использовано при создании iдистанционных копирующих маиипулятбров, выполняющих операции с объектами, на которые наложены внешние связи. Изобретение расширяет функциональные возможности устройства. В устройстве за счет введения двух преобразователей сигнала, ключа и вибратора, установленного в рукоятке задающего бргана, обеспечивается вьфаботка сигналов о нагрузке на исполнительном органе и величине рассогласования задающего и исполнительного органов при работе с инструментом. 1 ил. i (Л С
- 18
Щ
15
Составитель Е.Политов Редактор В.Иванова Техред Л.СердюковаКорректор М.СамборскаЯ
Заказ 4574/18Тираж 1031Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1120278A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
