f-a
сь со
Юо
«
Изобретение относится кробототехнике и может быть использовано при создании дистанционных манипуляторов .
По основному авт.св. № 582960 известно устройство для управления дистанционным манипулятором, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задагацего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен к входу первого сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен к второму входу второго сумматора, второй выход гидропривода с входом датчика угла исполнительного органа, а выход датчика момента подключен к второму входу первого сумматора 1.
Недостатком известного устройства является невозможность развязки движений задающего и исполнительного органов, например, при длительном удержании исполнительным органом в неподвижном состоянии объекта манипулирования, а также при обращении к другой аппаратуре вследствие того, что угловая координата задающего органа постоянно следит за угловой координатой исполнительного.
Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения развязки движений эадакхдего и исполнительного органов.
Поставленная цель достигается тем что устройство содержит два ключа, через первый из которых выход первого сумматора соединен с входом усилителя, а через второй - выход второго сумматора подключен к входу электропривода, причем второй вход второго ключа соединен с-выходом датчика момента.
На чертеже представлена функциональная схема устройства.
На схеме обозначены упругий элемент 1, датчик 2 момента, первый сумматор 3, первый ключ 4, усилитель 5, электрогидроусилитель 6, гидропривод 7, датчик 8 угла исполнительного органа, второй сумматор 9, второй ключ 10, электропривод 11/ оператор 12, датчик 13 давления, датчик 14 угла задающего органа, нагрузка 15.
Устройство работает следующим образом.
ак как оба ключа 4 и 10 могут быть конструктивно объединен, т.е. могут иметь одну клавишу (рукоятку)
управления, оператор 12 может одновременно замкнуть первый ключ 4, а выход второго ключа 10 подключить к его первому входу. При силовом воздействии оператора 12 на упругий элемент 1, угол закрутки которого замеряется датчиком 2 момента, вырабатывается сигнал, пропорциональный силовому воздействию оператора 12. Этот сигнал поступает на первый вход первого сумматора з; На второй вход первого сумматора 3 поступает сигнал с датчика 13 давления, пропорциональный силовому воздействию нагрузки 15 на гидропривод 7. Разностный сигнал с первого сумматора 3 подается через замкнутые контакты первого ключа 4, усилитель 5 и электрогидроусилитель 6 на гидропривод 7, выходной вал которого при этом перемещается со скоростью, пропорциональной разности силового воздействия оператора 1 и нагрузки 15. Электропривод 11 осуществляет слежение своего выходного вала за положением выходного вала гидропривода 7 по сигналу со второго сум иатора 9 через второй ключ 10, выход которого соединен с его первым входом. Информация о положениях -выходных валов гидропривода 7 и электропривода 11 снимается соответственно с датчиков 8 и 14 угла исполнительного и задающего органов.
При необходимости освободить объем места оператора 12 последний, используя е,циную клавишу (рукоятку) управления ключами 4 и 10, разкйкает первый ключ 4 и соединяет выход второго ключа 10с его вторым входом. Так как входная координата гидропривода 7 пропорциональна скорости перемещения его выходного вала, при разомкнутом первом ключе 4 этот вал неподвижен. Движение выходного вала электропривода 11 управляется при соединении выхода второго ключа 10 с его вторым входом по сигналу датчика 2 момента. Таким образом, оператор 12 может при неподвижном выходном вале гидропривода 7 управлять положением выходного вала электропривода 11,Т.е. он имеет возможност освободить объем места оператора 12 от задающего органа отведением задающего органа.
Когда необходимо снова.привести в движение исполнительный орган, оператор, воздействуя на единую клавишу (рукоятку) управления ключами 4 и 10, замыкает первый ключ 4, а выход второго ключа, 10 подключает к его первому входу.
Применение изобретения позволяет расширить функциональные возможности устройства за счет развязки движений задающего и исполнительного органов, вывести из объема места оператора задающий орган при неподвижном исполнительном органе, ввести в этот объем дополнительную аппаратуру, например кинокамеру, и работать с ней, а оператору покинуть рабочее место без потери объекта манипулирования.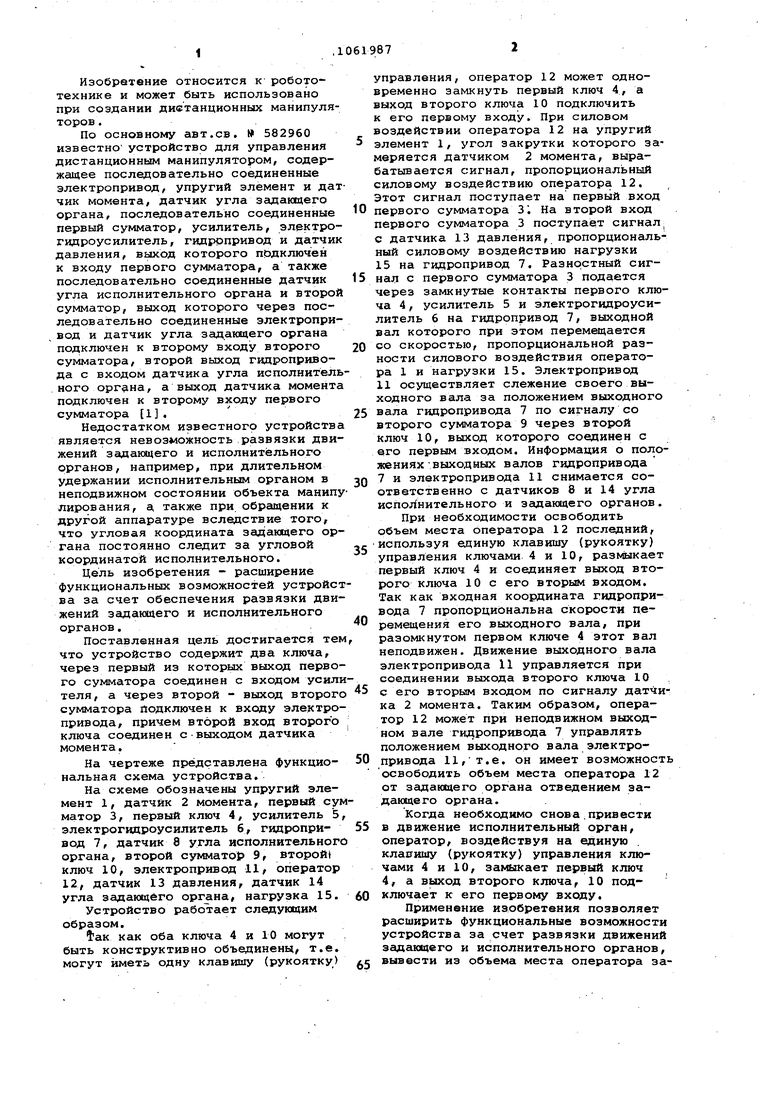
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ МАНИПУЛЯТОРОМ ПО авт. св. 582960, отличаюгЦее-, с я тем, что, с целью расширения функциональных возможностей устройства за счет обеспечения развязки движений задающего и исполнительного органов, устройство Содержит два ключа, через из которых выход первого сумматора соединен с входом усилителя, а через вторрй - выход второго сумматора подключен к входу электропривода, причем второй вход второго ключа соединен с выходом датчика момента.