ственно первая каретка - ползун 3 н вторая каретка - ползун 9. При этом первая каретка - ползун 3 имеет горизонтальную направляющую 4, в которой установлена механическая рука 5, кинематически связанная с приводом посредством трособлочной передачи, системы рычагов и приводного вала. Система направления тросов 17 и 18 трособлочной передачи обеспечивает
Изобретение относится к области машиностроения, а именно к оборудованию для привода перемещения механической руки манипулятора в двух взаимно перпендикулярных плоскостях, отдельные движения которых взаимосвязаны.
Известный манипулятор с электроприводом и передаточными механизмами осуществляющими движение механической руки (Авторское свидетельство СССР№ 1024268, кл. В 25 J 11/00, 03.82) имеет значительные энергозатраты при повышении грузоподъемности и плохие динамические характеристики
Цель изобретения - улучшение динамических характеристик и снижение энергозатрат при повышении грузоподъемности .
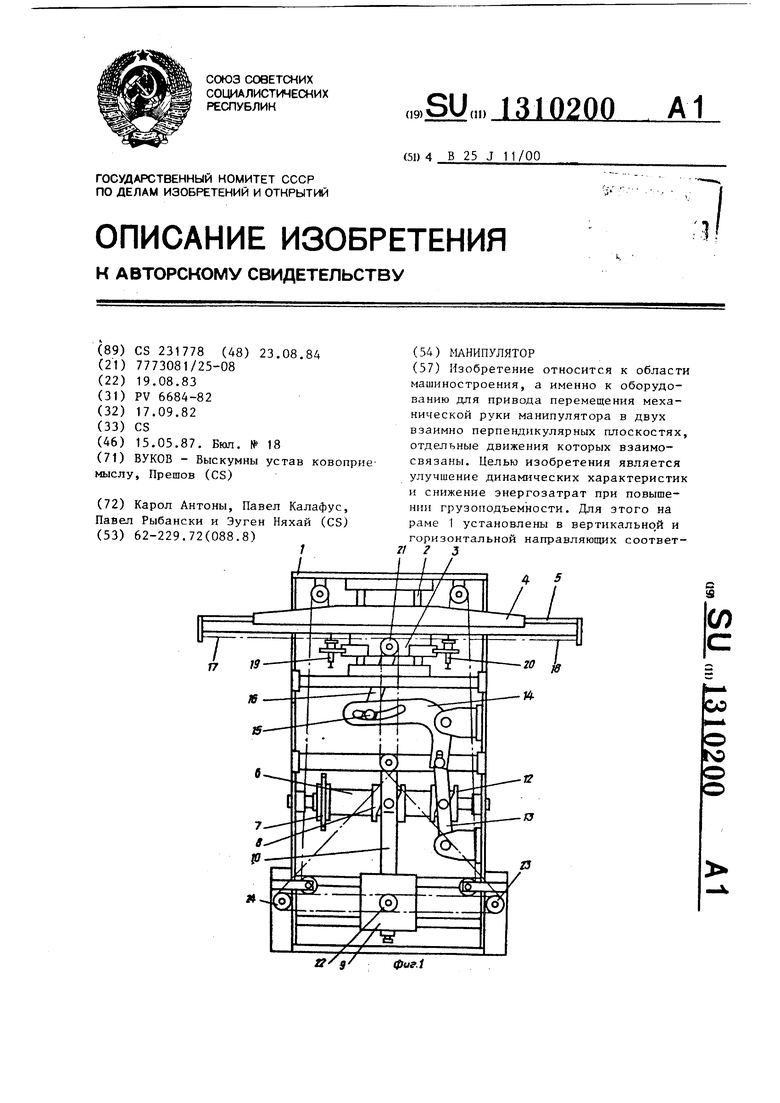
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - соединение рычага с второй кареткой.
Манипулятор имеет корпус, выпол- ненный в виде рамы 1 с вертикальными направляющими 2, на которых расположена первая каретка-ползун 3, имеющая горизонтальную направляющую 4. Механическая рука 5 установлена в горизонтальной направляющей 4 и кинематически связана с приводом посредством трособлочной передачи, системы рычагов и приводного вала. На приводном валу 6, имеющем приводное колесо 7, находится кулачок го- ризонтального перемещения 8, соединенный с второй кареткой-ползуном 9 Эта связь осуществляется с помощью ролика, расположенного в копирном
.-
пазу кулачка горизонтального переменезависимость Ешртикального перемещения механическо руки 5, осуществляемого от кулачка 12 вертикального перемещения через качающий рычаг 13, двуплечий рьмаг (балансир) 14 и шатун 16 от горизонтального перемещения механической руки 5, осуществляемого от кулачка горизонтального перемещения 8 через рычаг 10 и передачу, образованную тросами 17 и 18. 2 ил.
щения 8, шарр{ирно установленного на рычаге 10. Один конец рычага 10 шар- нирно связан с рамой 1, а другой посредством ползуна 11 - с второй кареткой-ползуном 9. Кроме того, на приводном валу 6 находится кулачок вертикального перемещения 12. При этом ролик, расположенный в копирном пазу кулачка вертикального перемещения 12, шарнирно установлен на качающемся рычаге 13.
Рычаг 13 одним кондом связан с рамой 1 , а pyгим кондом взаимодействует с одним плечом двуплечего рычага (балансира) 14. Двуплечий рычаг (балансир) 14 шарннрно закреплен на раме и имеет на другом своем плече криволинейный паз, в котором расположен палед 15 шатуна 16, шарнирно закрепленного на первой каретке-ползуне 3. Причем трособлочная передача образована двумя тросами (тяговыми элементами) 17 и 18 и системой блоков (роликов). На противоположных концах механической руки закреплены соответственно задний трос (тяговый элемент) 17 и передний трос (тяговый элемент) 18, которые проходят через систему блоков (роликов), установленных на дапфах. Концы тросов 17 и 18 закреплены посредством крепежных болтов 19 и 20 на первой каретке-ползуне 3, установленной на вертикальных направля- Ю1цих 2.
Первый блок 21 находится в центральной части первой каретки-ползуна 3, второй блок 22 - на второй каретке-ползуне 9. Папфы остальных блоков жестко соединены с рамой 1 и установлены симметрично относительно ее вертикальной оси. Трос 17 находится на блоках 22 и 23, а трос 18 - на блоках 22 и 24, обмотанный хотя бы один раз.
Манипулятор работает следующим образом.
Движение второй каретки-ползуна 9 передается от кулачка горизонтального перемещения 8 приводного вала 6 с помощью рычага 10, а также тросов 17 и 18 на механическую руку 5. Причем траектория механической руки 5 представляет двукратное значение траектории второй каретки-ползуна 9, умноженное на число обмоток тросов 17 и 18 на блоках 22-24.
Система направления тросов 17 и 18 обеспечивает независимость вертикального перемещения механической руки 5, осуществляемого от кулачка вертикального перемещения 12 через качающийся рычаг 13, двуплечий рычаг (балансир) 14 и щатун 16 от горизонтального перемещения механической руки 5, осуществляемого от кулачка горизонтального перемещения 8 через рычаг 10 и передачу тросами 17 и 18.
Эти движения могут производиться совместно или постепенно друг за другом в любой последовательности, причем их траектория определяется формой и взаимной установкой кулачков 8 и 12 приводного вала 6.
Формула изобретения
Манипулятор, содержащий корпус, выполненный в виде рамы с вертикальными направляющими, на которых расположена первая каретка-ползун, имеющая горизонтальную направляющую, а
механическая рука установлена в них и кинематически связана с приводом, отличающийся тем, что, с целью улучшения динамических харак- теристик и снижения энергозатрат при повышении грузоподъемности, он снабжен второй кареткой-ползуном, установленной в дополнительных горизонтальных направляющих, выполненных на
раме, а кинематическая связь механической руки с приводом выполнена в виде трособлочной передачи, системы рычагов и приводного вала, имеющего кулачки горизонтального и вертикального перемещений, при этом ролик,
расположенньш в копирном пазу кулачка вертикального перемещения, шарнир- но установлен на рычаге, одним концом шарнирно связанным с рамой, а другим
концом взаимодействующим с одним плечом двуплечего рычага (балансира), который шарнирно закреплен на раме, и имеющим на другом своем плече криволинейный паз, в котором расположен палец шатуна, шарнирно закрепленного на первой каретке, а ролик, расположенный в копирном пазу кулачка горизонтального перемещения, шарнирно установлен на рычаге, один конец которого шарнирно связан с рамой, а другой посредством ползуна - с второй кареткой-ползуном, причем тросо- блочная передача образована двумя тросами, закрепленными одними своими
концами на противоположных концах механической руки, а другими посредством крепежных болтов - на первой каретке, при этом блоки этой передачи посредством цапф установлены соответственно в центральной части кареток и на раме симметрично относительно ее вертикальной оси.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МАНИПУЛЯТОР | 1989 |
|
SU1584290A1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Установка для очистки емкостей с узкой горловиной | 1983 |
|
SU1187970A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| ВЕЛОСИПЕД С ДВИЖЕНИЕМ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 2007 |
|
RU2348563C2 |
| Установка для укладки керамических камней на сушильные вагонетки | 1983 |
|
SU1133104A1 |
| Устройство для подачи грузов в оконные проемы | 1986 |
|
SU1379428A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |

Изобретение относится к области машиностроения, а именно к оборудованию для привода перемещения механической руки манипулятора в двух взаимно перпендикулярных плоскостях, отдельные движения которых взаимосвязаны. Целью изобретения является улучшение динамических характеристик и снижение энергозатрат при повышении грузоподъемности. Для этого на раме 1 установлены в вертикальнрй и горизонтальной направляющих соответ- 3 (Л