Изобретение относится к сельскохозяйственному машиностроению, а именно к средствам загрузки корнеклубнеплодов в хранилища на хранение или в автомобильные,, железнодорожные и т.п. средства транспорта.
Цель изобретения - повышение производительности путем автоматизации процесса закладки корнеклубнеплодов на хранение и предотвращения поломок загрузчика.
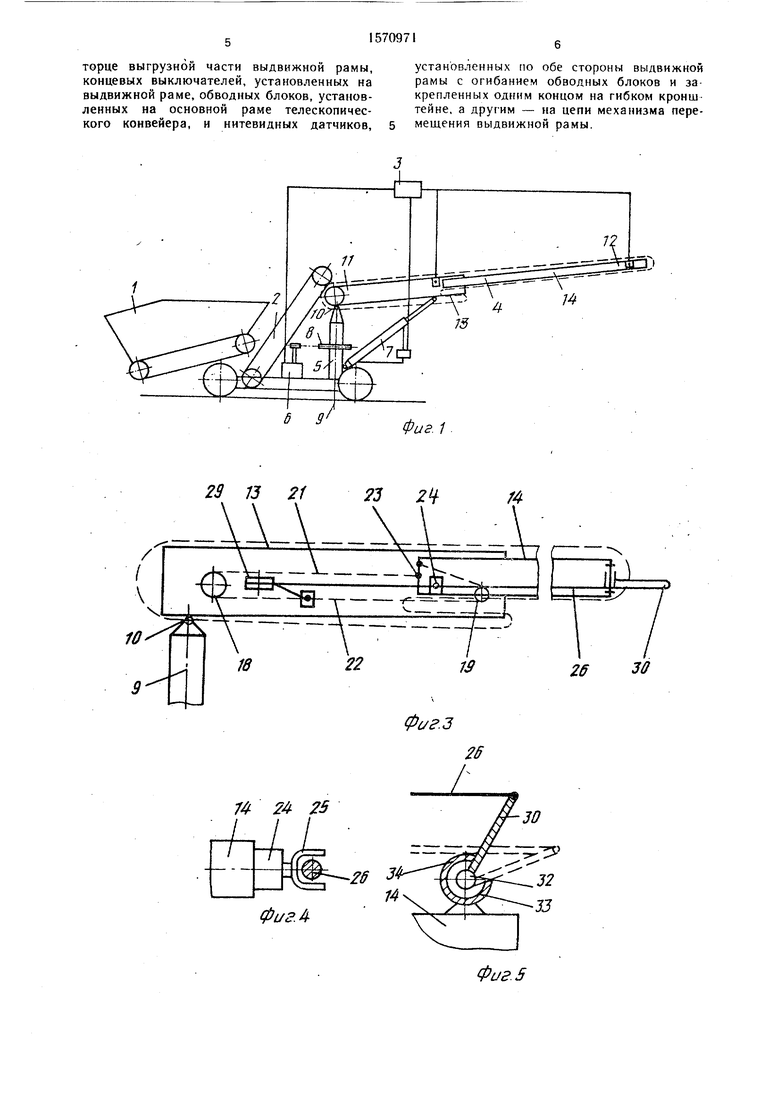
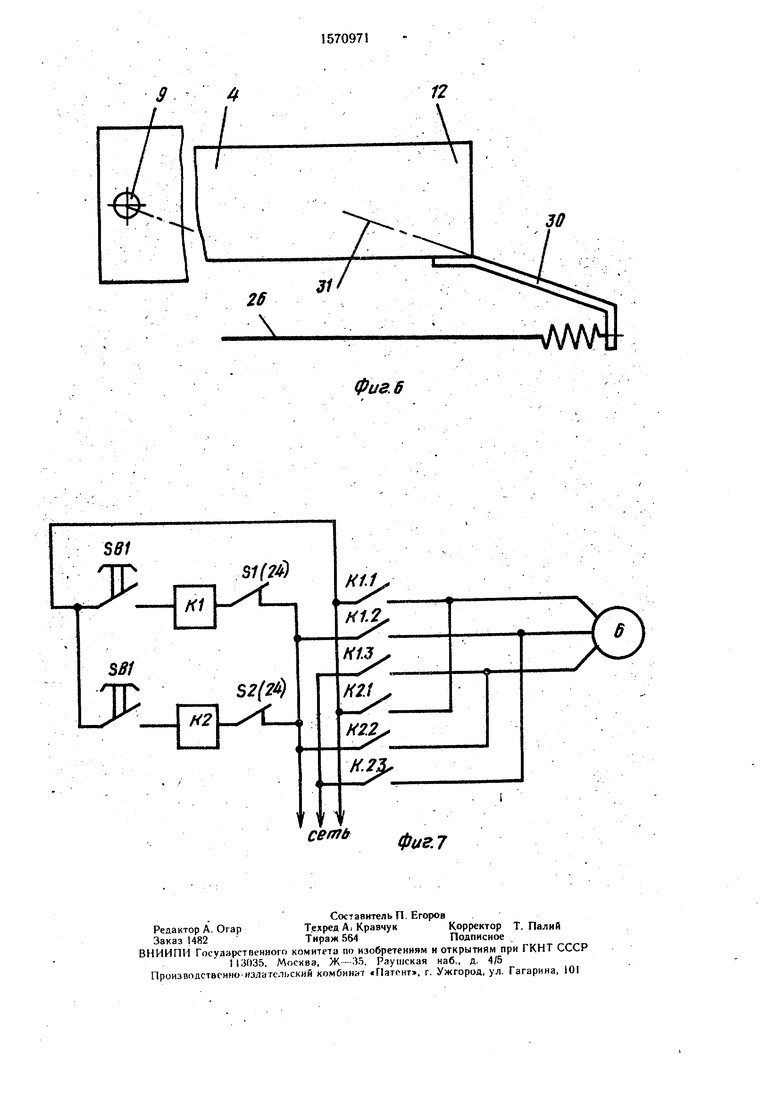
На фиг. 1 изображена общая схема загрузчика, вид сбоку; на фиг. 2 - схема телескопического конвейера, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - взаимное положение нитевидного датчика и концевого выключатели; на фиг. 5 и 6 - гибкие кронштейны, примеры исполнения; на фиг. 7 - принципиальная схема системы управления механизмом поворота телескопического конвейера.
Загрузчик включает приемный бункер 1 с подвижным дном, подъемный транспортер 2, систему 3 управления и телескопический конвейер 4. Телескопический конвейер 4 шарнирно установлен на поворотной колонне 5 и снабжен механизмами 6-8 его поворота в горизонтальной и вертикальной плоскостях относительно осей 9 и 10. Телескопический конвейер 4 имеет приемную 11 и выгрузную 12 части и образован телескопически расположенными основной 13 и выдвижной 14 рамами. Транспортерная лента показана пунктиром. Направляющие, по которым перемещается выдвижная рама 14, условно не показаны. На основной раме 13 установлен механизм 15 перемещения выдвижной рамы М. Он включает передаточное устройство 16, электродвигатель 17, ведущие 18 и обводные 19 звездочки, огибаемые бортовыми замкнутыми цепями 20. Цепи 20 имеют верхние 21 и нижние 22 ветви и посредством связи 23 соединяются верхней ветвью 21 с выдвижной рамой 14. Механизм аварийного отключения механизмов поворота (6 и 8) и перемещения (15) включает концевые выключатели 24 с кнопкой 25 выключения, нитевидный датчик 26 взаимодействия с препятствиями (например, колонной 27, стеной 28 и т.п.), обводные блоки 29 и гибкие кронштейны 30. Концевые выключатели 24 установлены на выдвижной раме 14, обводные блоки 29 на основной раме 13. Гибкие кронштейны 30 установлены на торце выгрузной части выдвижной рамы 14, а их продольные оси 31 при максимальной длине телескопического конвейера пересекаются на оси 9 вращения колонны 5. Нитевидные датчики 26 одним концом закреплены на гибком кронштейне 30, а другим - на нижней ветви 22 бортовой цепи 20 и огибают обводные блоки 29. Нитевидные датчики 26 установлены с зазором к выдвижной раме 14 с возможностью ша- имодействия с кнопкой 25 выключения кошевых выключателей 24. Элементы натяжения нитевидных датчиков 26 условно не показаны. Гибкие кронштейны 30 могут быть выполнены в виде осевых шарниров 32 с
ограничителями 33 поворота кронштейнов 30.
Система 3 управления загрузчиком состоит из концевых выключателей S1 и S2 и контакторов К1 и К2 реверсивного механизма поворота 6 телескопического
конвейера и кнопок SB1 и SB2 включения поворота.
Система управления работает следующим образом.
При включении кнопки SB1, например, срабатывает контактор К1 и включается механизм 6 поворота на движение вправо. При срабатывании концевого выключателя 24 движение прекращается. Аналогичный процесс происходит и при движении влево.
® Загрузчик работает следующим образом. При помощи механизмов 6-8 поворота телескопического конвейера 4 и изменением его длины формируют насыпь корнеклубнеплодов в хранилище В автоматическом
5 режиме при повороте телескопического конвейера 4, например, вправо он поворачивается до тех пор, пока нитевидный датчик
26или кронштейн 30 не заденут препятствие
27или 28. При этом в любом случае уменьшается зазор между нитевидным датчиком
0 26 и выдвижной рамой 14, а нитевидный датчик 26 надавливает на кнопку 25 выклю- и с помощью системы 3 управления .ачинается поворот телескопического конвейера 4 в другую сторону.
Предлагаемая конструкция загрузчика
5 позволяет автоматизировать процесс закладки корнеклубнеплодов на хранение в хранилищах, в которых габариты просветов меньше длины вылета разгрузочной части телескопического конвейера, и одновременно
Q исключает поломки загрузчика.
формула изобретения
Загрузчик корнеклубнеплодов, включающий систему управления и телескопичес5 кий конвейер, содержащий основную раму с приемной частью, выдвижную раму с выгрузной частью, механизм перемещения выдвижной рамы, цепь механизма перемещения, приводной и обводной барабаны и транспортерную ленту, их огибающую,
0 отличающийся тем, что, с целью повышения производительности путем автоматизации процесса закладки корнеклубнеплодов на хранение и предотвращения поломок загрузчика, он снабжен механизмом поворота телескопического конвейера в горизонталь ной плоскости и механизмом аварийного отключения механизма поворота, при этом механизм отключения выполнен в виде пары гибких кронштейнов, установленных ни
торце выгрузной части выдвижной рамы, концевых выключателей, установленных на выдвижной раме, обводных блоков, установленных на основной раме телескопического конвейера, и нитевидных датчиков,
установленных по обе стороны выдвижной рамы с огибанием обводных блоков и за крепленных одним концом на гибком кронш теине, а другим - на цепи механизма перемещения выдвижной рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузчик корнеплодов в хранилище | 1987 |
|
SU1517816A1 |
| Загрузчик сеялок | 1988 |
|
SU1565377A1 |
| КАРТОФЕЛЕХРАНИЛИЩЕ | 1990 |
|
RU2019951C1 |
| Загрузчик сеялок | 1989 |
|
SU1628894A1 |
| Загрузчик сеялок | 1985 |
|
SU1296027A1 |
| ЗАГРУЗЧИК СЕМЯН В СЕЯЛКИ | 2005 |
|
RU2283567C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Комплекс для подачи закладки в выработанное пространство | 1989 |
|
SU1693268A1 |
| Устройство для нанесения покрытий на поверхность изделий торроидальной формы | 1984 |
|
SU1219406A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к средствам загрузки корнеклубнеплодов в хранилища на хранение или в автомобильные, железнодорожные и т.п.средства транспорта. Цель изобретения - повышение производительности путем автоматизации процесса закладки корнеклубнеплодов на хранение и предотвращение поломок загрузчика. Загрузчик корнеклубнеплодов включает систему управления и телескопический конвейер. Последний содержит основную раму 13 с приемной частью, выдвижную раму (ВР) 14 с выгрузной частью, механизм перемещения (МП) 15 ВР 14, цепь 20 МП 15, приводной и обводной барабаны и транспортерную ленту, их огибающую. Загрузчик снабжен механизмом поворота телескопического конвейера и механизмом аварийного отключения механизма поворота. Механизм отключения выполнен в виде пары гибких кронштейнов 30, установленных на торце выгрузной части ВР 14, концевых выключателей 24, установленных на ВР 14, обводных блоков 29, установленных на основной раме 13, и нитевидных датчиков 26, установленных по обе стороны ВР 14 с огибанием обводных блоков 29. Нитевидные датчики 26 одним концом прикреплены к гибкому кронштейну 30, а другим- к цепи МП 15. Если при движении ВР 14 в какую-либо сторону происходит наталкивание нитевидных датчиков 26 на препятствие 27 или 28, то после этого датчик 26 нажимает на концевой выключатель 24, и с помощью системы управления начинается поворот ВР 14 в другую сторону. 7 ил.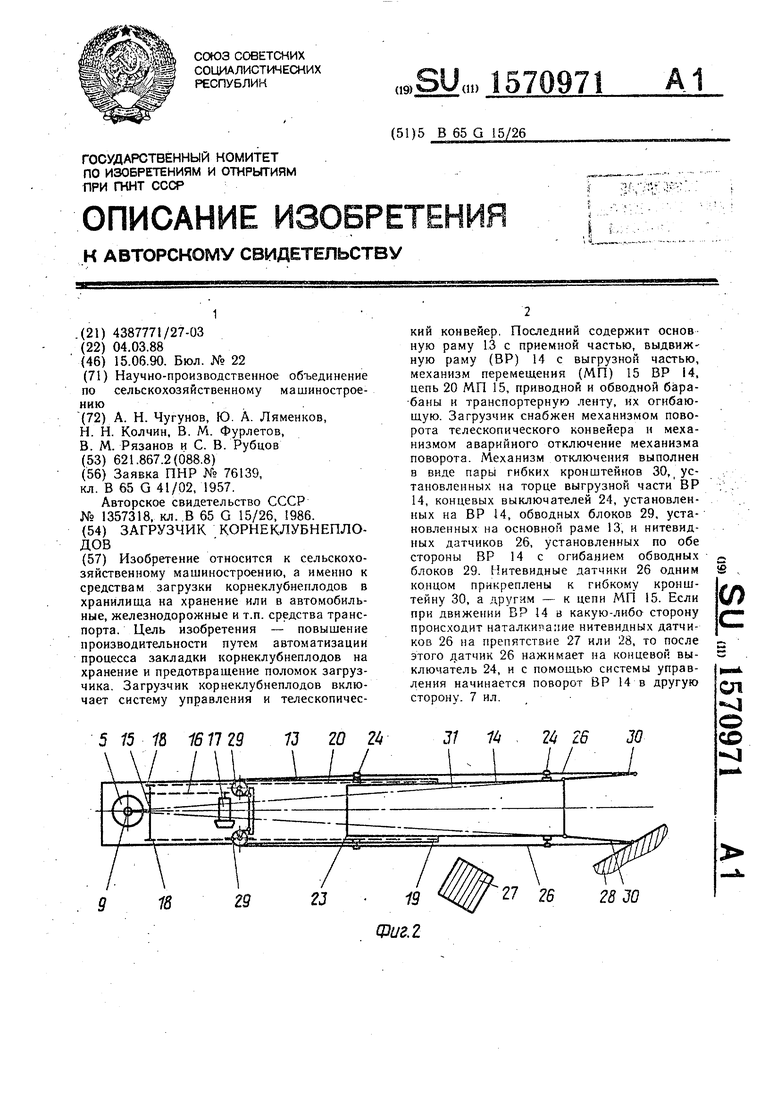
б 3
29 13 2123 2Ц
ЦД V
- , Lin.--. I
:,сГг ЬП(
18
Фиг 4Фиг 1
26 30
Фиг 5
Фиг. 6
Фие.7
| Электрически нагреваемый электрод для выполнения хирургических операций | 1948 |
|
SU76139A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Телескопический конвейер | 1986 |
|
SU1357318A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
