Изобретение относится к станкостроению и может быть использовано в технологических роторах для прецизионных, высокоскоростных и тяжелонагруженных приводов рабочего движения.
Целью изобретения является повышение точности и надежности за счет исключения разрыва кинематической цепи, снижения и выравнивания контактной нагрузки между взаимодействующими друг с другом элементами привода.
На чертеже показан привод, общий вид о
Привод рабочего движения технологического ротора содержит пазовый копир 1, размещенный в стакане 2, ползуны 3, подвижно смонтированные в барабане 4, и рабочие ролики 5, установленные в пазовом копире 1 на осях 6, закрепленных на ползунах 3, Барабан 4 монтируется на валу 7, верхний хвостовик которого установлен в подшипнике 8, размещенном в стакане 2, закрепленном на плите 9.
Дополнительно этому стакан 2 снабжен вспомогательными пазовыми копирами 10, а на ползунах 3 выполнены направляющие и соосно им размещены управляющие втулки 11. На управляющих втулках 11 закреплены оси 12 и на них размещены компенсирующие ролики 13, расположенные во вспомогательных пазовых копирах 100 Для предотвращения поворота ползуна 3 относительно барабана 3 установлена шпонка 14, а для исключения поворота управляющей втулки 11 относительно ползуна 3 установлена направляющая шпонка 15„ При этом втулки 11 связаны с ползунами 3 упругими элементами, например,, пружинами 16 прямого и обратного действия, а оси 6 и 12 вра0
5
0
5
0
5
0
5
щения рабочих 5 и компенсирующих 13 роликов размещены параллельно одна другой в плоскости, проходящей через ось вращения ротора0
Привод рабочего движения технологического ротора работает следующим образом.
В процессе эксплуатации технологического ротора барабан 4, закрепленный на валу 7, размещенном в подшипнике 8, поворачивается относительно неподвижного пазового копира 1, установленного в стакане 2, расположенном на плите 90 За счет того, что рабочие ролики 5 установлены в пазовом копире 1 на осях 6, смонтированных на ползунах 3, обеспечивается возвратно-поступательное перемещение ползунов 3, соответствующее заданному технологическому движению и профилю пазового копира 1. В скоростных технологических роторах возникающие при этом инерционные нагрузки ползунов 3 приводят к нарушению кинематической связи привода рабочего движения. В этом случае появляются удары рабочих роликов 5 о рабочие поверхности пазового копира 1, что ведет к неравномерному прогрессирующему их износу и снижению точности привода о Для предотвращения отрыва рабочего ролика 5 от пазового копира 1 используется силовое замыкание, которое выполняется управляющими втулками 11, связанными с ползунами 3 упругими элементами, например, пружинами 16. Благодаря тому, что управляющие втулки 11 перемешаются по направляющим ползуна 3 при помощи компенсирующих роликов 13, раямещен- ных во вспомогательных ПАТОВЫХ копирах 10 и закреплении на осях 12, достигается постоянное рабе51
чих роликов 5 к патовому копиру 1. Здесь направляющие шпонки 14 и 15 исключат проворот ползунов 3 и управляющих втулок 11 относительно барабана А. В этом случае силовое замыкание предотвращает отрывы рабочего ролика 5 от пазового копира 1, что обеспечивает непрерывную кинематическую связь элементов привода. Однако при этом контактное давление между рабочим роликом 5 и пазовым копиром 1 зависит от их углового положения, так как инерционная и технологическая нагрузка, действующая на каждый ползун 3, изменяется в зависимости от углового положения; ротора.
Для исключения разрыва кинематической цепи, снижения и выравнивания контактной нагрузки между рабочими роликами 5 и пазовым копиром 1 вспомогательные пазовые копиры 10 имеют профиль, представляющий собой огибающую цилиндра, образованную при движении его оси вокруг продольной оси стакана 2. При движении компенсирующих роликов 13 по таким вспомогательным пазовым копирам 10 управляющие втулки 11 через упругие элементы 16 непрерывно обеспечивают постоянство контактного давления между рабочими роликами 5 и пазовым копиром 1. С увеличением числа вспомогательных пазовых копиров 10 нагрузка, действующая на рабочий ролик 5, снижается и
06
перераспределяется на компенсирующие ролики 13. Количество вспомогательных пазовых копиров определяется геометрическими особенностями ротора и всегда выполняется не менее одного.
Формула изобретения Привод рабочего движения технологического ротора, содержащий закрепленный в стакане пазовый копир и ползуны, установленные равномерно по окружности барабана с возможностью возвратно-поступательного перемещения посредством рабочих роликов, размещенных в пазу копира, отличающийся тем, что, с целью повышения надежности и точности работы, привод снабжен по меньшей мере одним дополнительным пазовым копиром, втулками, дополнительными роликами и упругими элементами, при этом дополнительные копир и ролики закреплены соответственно в упомянутом стакане
и на втулках, а каждая втулка установлена на ползуне с возможностью возвратно-поступательного перемещения вдоль его оси и связан с ползуном посредством упругого элемента,
причем дополнительные ролики размещены в пазу дополнительного копира, а оси вращения основного и дополнительного роликов параллельны одна другой и расположены в плоскости, проходящей через ось вращения ротора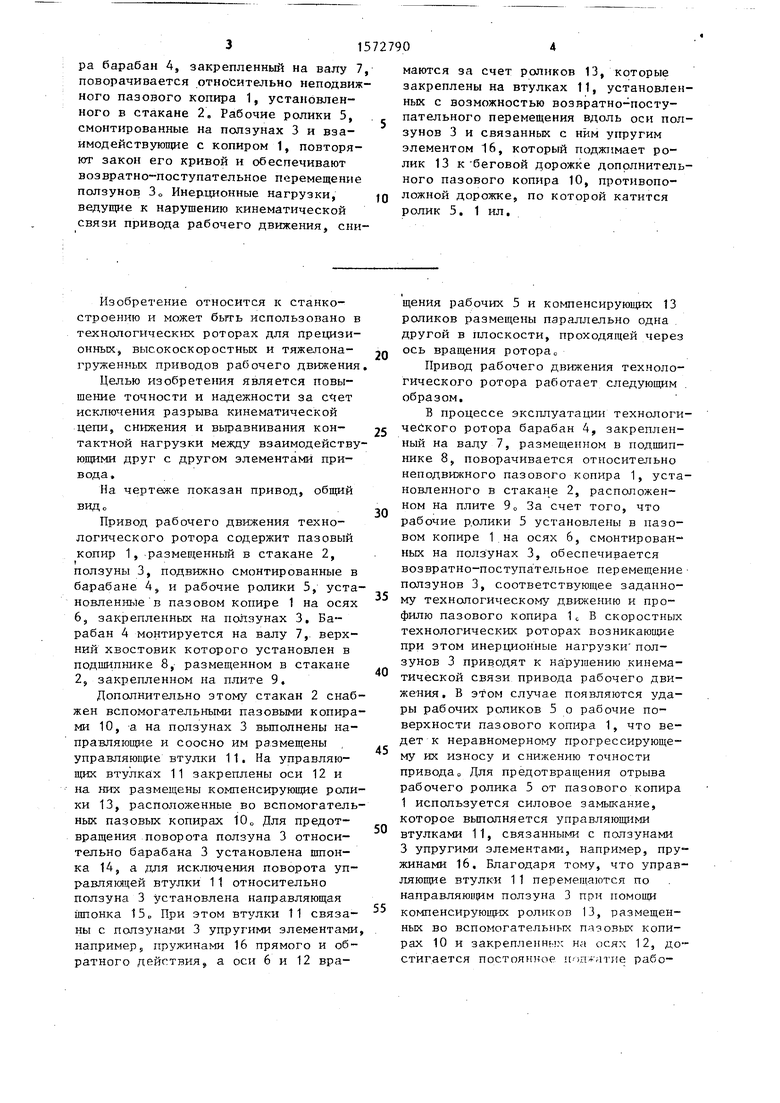
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
| Устройство для изготовления и надевания чехлов на конденсаторы | 1985 |
|
SU1372394A1 |
| Установка для очистки изделий | 1989 |
|
SU1622033A1 |
| Питающий ротор | 1989 |
|
SU1697948A1 |
| Роторно-конвейерная машина | 1987 |
|
SU1449356A1 |
| Роторно-конвейерная машина | 1987 |
|
SU1532300A1 |
| Роторная машина | 1983 |
|
SU1110666A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Способ обработки изделий на технологическом роторе роторных машин и устройство для его осуществления | 1988 |
|
SU1581598A1 |
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
Изобретение относится к станкостроению и может быть использовано в технологических роторах для высокоскоростных и тяжелонагруженных приводов рабочего движения. Цель изобретения - повышение надежности и точности работы за счет исключения разрыва кинематической цепи, снижения и выравнивания контактной нагрузки между взаимодействующими друг с другом элементами привода. При работе ротора барабан 4, закрепленный на валу 7, поворачивается относительно неподвижного пазового копира 1, установленного в стакане 2. Рабочие ролики 5, смонтированные на ползунах 3 и взаимодействующие с копиром 1, повторяют закон его кривой и обеспечивают возвратно-поступательное перемещение ползунов 3. Инерционные нагрузки, ведущие к нарушению кинематической связи привода рабочего движения, снимаются за счет роликов 13, которые закреплены на втулках 11, установленных с возможностью возвратно-поступательного перемещения вдоль оси ползунов 3 и связанных с ним упругим элементом 16, который поджимает ролик 13 к беговой дорожке дополнительного пазового копира 10, противоположной дорожке, по которой катится ролик 5. 1 ил.
Составитель Э.Комаров Редактор О.Головач Техред М.Ходанич
Заказ 1610
Тираж 667
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор В.Кабаний
Подписное
| Кошкин Л.Н | |||
| Комплексная автоматизация производства на базе роторных линий | |||
| - М.: Машиностроение, 1972, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
