31
Изобретение относится к области Автоматики землеройной техники, может быть использовано для автоматического управления землеройными машинами, Например траншеекопателем, и является усовершенствованием устройства по Основному авт. св. N 613104.
Цель изобретения - расширение области применения за счет обеспече- йия автоматического управления поло- пением машины при движении по заданной траектории.
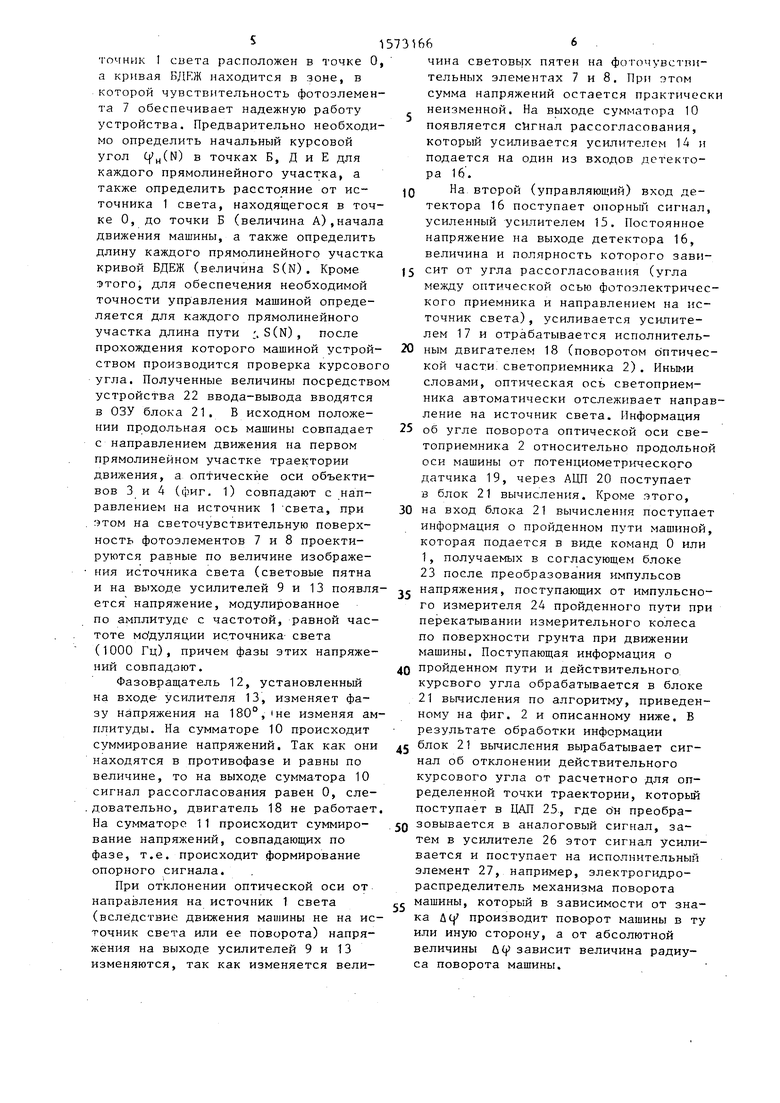
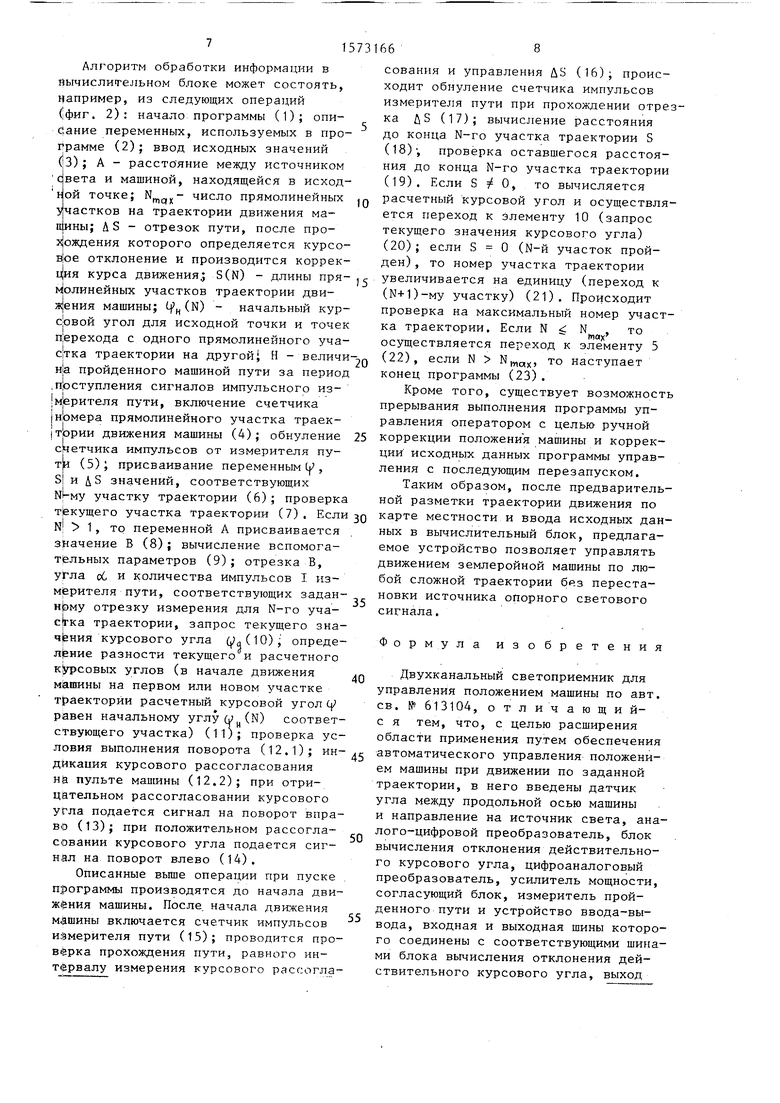
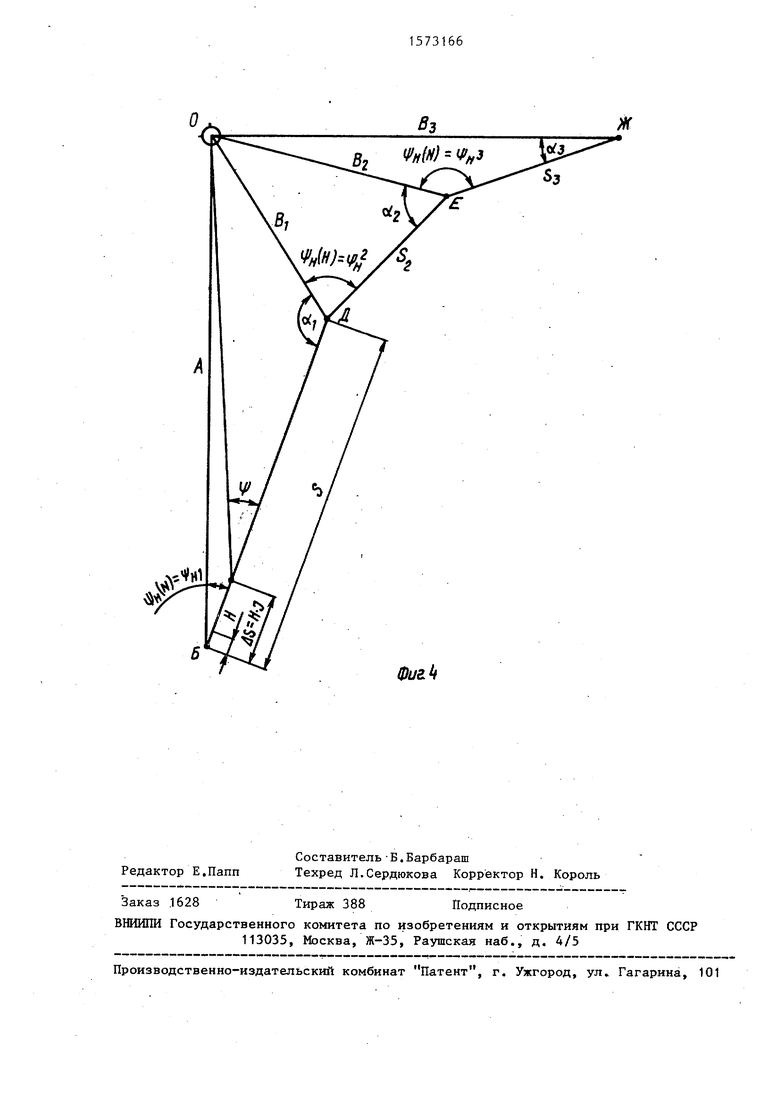
На фиг. 1 изображена структурная Јхема светоприемника; на фиг. 2 и 3 - блок-схема алгоритма программы автоматического управления движением машины , на фиг. 4 - расчетная Схема траектории движения машины на примере траектории с тремя прямо- Линейными участками.
Светоприемник содержит источник 1 Модулированного света, двухканальный Приемник 2 с объективами 3 и 4, оптические оси которых параллельны. Вбли зи фокальных плоскостей объективов 3 и 4, против окон 5 непрозрачной диафрагмы 6, установлены фоточувствительные элементы 7 и 8. Устройство имеет также усилитель 9, противофаз- ный 10 и синфазный 11 сумматоры сигналов, фазовращатель 12, усилители 13-15, детектор 16, усилитель 17, исполнительный двигатель 18, кинематически связанный с оптической осью светоприемника, которая в свою оче- (редь кинематически связана с потен- циометрическим датчиком 19 угла между продольной осью машины и направлением на источник света, аналогово- цифровой преобразователь (АЦП) 20, блок 21 вычисления действительного курсового угла, устройством 22 ввода вывода, согласующий блок 23, измеритель 24 пройденного пути, цифроанало говый преобразователь (ЦАП) 25, усилитель 26 мощности. Последний связан с- исполнительным элементом 27 механизма поворота машины.
Для пояснения работы устройства приняты следующие обозначения на рас четной схеме траектории движения машины и на блок-схеме алгоритма работ программы автоматического управления движением машины: 0 - точка на местности, в которой установлен источник модулированного света; Б - исходная точка начала движения; БДЕЖ - необходимая траектория движения машины ,
0 Q
0 5
5
664
А (ОБ) - расстояние от источника света до исходной точки начала движения машины; N - номер прямолинейного участка траектории движения маши- ньц N - число прямолинейных участков траектории (на фиг. 4 Nma 3); S(N) - длина N-ro прямолинейного участка траектории; ((N) - курсовой угол (угол между продольной осью машины и направлением на источник света) в начальный момент времени в исходной точке каждого N-ro линейного участка траектории; Н - величина пути, пройденного машиной; (| - величина расчетного (теоретического) курсового угла для определенного положения машины на тректории движения,1 &S - отрезок пути, после прохождения которого машиной, устройство, в зависимости от пройденного пути, рассчитывает теоретический курсовой угол и сравнивает его с действительным курсовым углом, а по результатам сравнения выдается команда на исполнительный механизм поворота машины для поворота ее в соответствующую сторону; I - число отрезков пути Н, составляющих отрезок (на фиг. 4 для первого участка I 5) ; величина действительного курсового угла, постоянно определяемого потенциометрическим датчиком устройства и поступающего через аналого-цифровой преобразователь в вычислительный блок; К - число команд, поступивших от блока сопряжения и импульсного измерителя в вычислительный блок; В - расстояние между источником света и машиной в конечной точке N-ro прямолинейного участка траектории; (х - угол между направлением на источник света и направлением на исходную точку N-ro прямолинейного участка в конечной точке этого участ- ка тах наибольший номер прямолинейного участка для расчетной траектории движения (на фиг. 4 Nma 3); Aty - разность между действительным и расчетным курсовыми углами для определенной точки на траектории движения.
Светоприемник работает следующим образом.
Предположим, машине, находящейся в исходной точке Б (фиг, 4), необходимо прокопать канал на местности по ломанной кривой БДЕЖ, с тремя прямолинейными участками (NWflt)( 3) . Исчочник 1 света расположен в точке О, а кривая БД ЕЖ находится в зоне, в которой чувствительность фотоэлемента 7 обеспечивает надежную работу устройства. Предварительно необходимо определить начальный курсовой угол ((N) в точках Б, Д и Е для каждого прямолинейного участка, а также определить расстояние от источника 1 света, находящегося в точке 0, до точки Б (величина А),начала движения машины, а также определить длину каждого прямолинейного участка кривой БДЕЖ (величина S(N). Кроме этого, для обеспечедия необходимой точности управления машиной определяется для каждого прямолинейного участка длина пути S(N), после прохождения которого машиной устройством производится проверка курсовог угла. Полученные величины посредство устройства 22 ввода-вывода вводятся в ОЗУ блока 21. В исходном положении продольная ось машины совпадает с направлением движения на первом прямолинейном участке траектории движения, а оптические оси объективов 3 и 4 (фиг. 1) совпадают с направлением на источник 1 света, при этом на светочувствительную поверхность фотоэлементов 7 и 8 проектируются равные по величине изображения источника света (световые пятна и на выходе усилителей 9 и 13 появляется напряжение, модулированное по амплитуде с частотой, равной частоте мо дуляции источника света (1000 Гц), причем фазы этих напряжений совпадают.
Фазовращатель 12, установленный на входе усилителя 13, изменяет фазу напряжения на 180°, не изменяя амплитуды. На сумматоре 10 происходит суммирование напряжений. Так как они находятся в противофазе и равны по величине, то на выходе сумматора 10 сигнал рассогласования равен 0, следовательно, двигатель 18 не работает На сумматоре 11 происходит суммирование напряжений, совпадающих по фазе, т.е. происходит формирование опорного сигнала.
При отклонении оптической оси от направления на источник 1 света (вследствие движения машины не на источник света или ее поворота) напряжения на выходе усилителей 9 и 13 изменяются, так как изменяется вели0
0
5
чина световых пятен на фогочувстни- тельных элементах 7 и 8. При этом сумма напряжений остается практически неизменной. На выходе сумматора 10 появляется сигнал рассогласования, который усиливается усилителем 14 и подается на один из входов детектора 16.
На второй (управляющий) вход детектора 16 поступает опорный сигнал, усиленный усилителем 15. Постоянное напряжение на выходе детектора 16, величина и полярность которого зави5 сит от угла рассогласования (угла
между оптической осью фотоэлектрического приемника и направлением на источник света), усиливается усилителем 17 и отрабатывается исполнительным двигателем 18 (поворотом оптической части светоприемника 2). Иными словами, оптическая ось светоприемника автоматически отслеживает направление на источник света. Информация об угле поворота оптической оси светоприемника 2 относительно продольной оси машины от потенциометрического датчика 19, через АЦП 20 поступает в блок 21 вычисления. Кроме этого, на вход блока 21 вычисления поступает информация о пройденном пути машиной, которая подается в виде команд 0 или 1, получаемых в согласующем блоке 23 после преобразования импульсов напряжения, поступающих от импульсного измерителя 24 пройденного пути при перекатывании измерительного колеса по поверхности грунта при движении машины. Поступающая информация о
0 пройденном пути и действительного курсвого угла обрабатывается в блоке 21 вычисления по алгоритму, приведенному на фиг. 2 и описанному ниже. В результате обработки информации
5 блок 21 вычисления вырабатывает сигнал об отклонении действительного курсового угла от расчетного для определенной точки траектории, который поступает в ДАЛ 25, где преобра0 зовывается в аналоговый сигнал, затем в усилителе 26 этот сигнал усиливается и поступает на исполнительный элемент 27, например, электрогидро- распределитель механизма поворота машины, который в зависимости от знака Д производит поворот машины в ту или иную сторону, а от абсолютной величины зависит величина радиуса поворота машины.
0
5
5
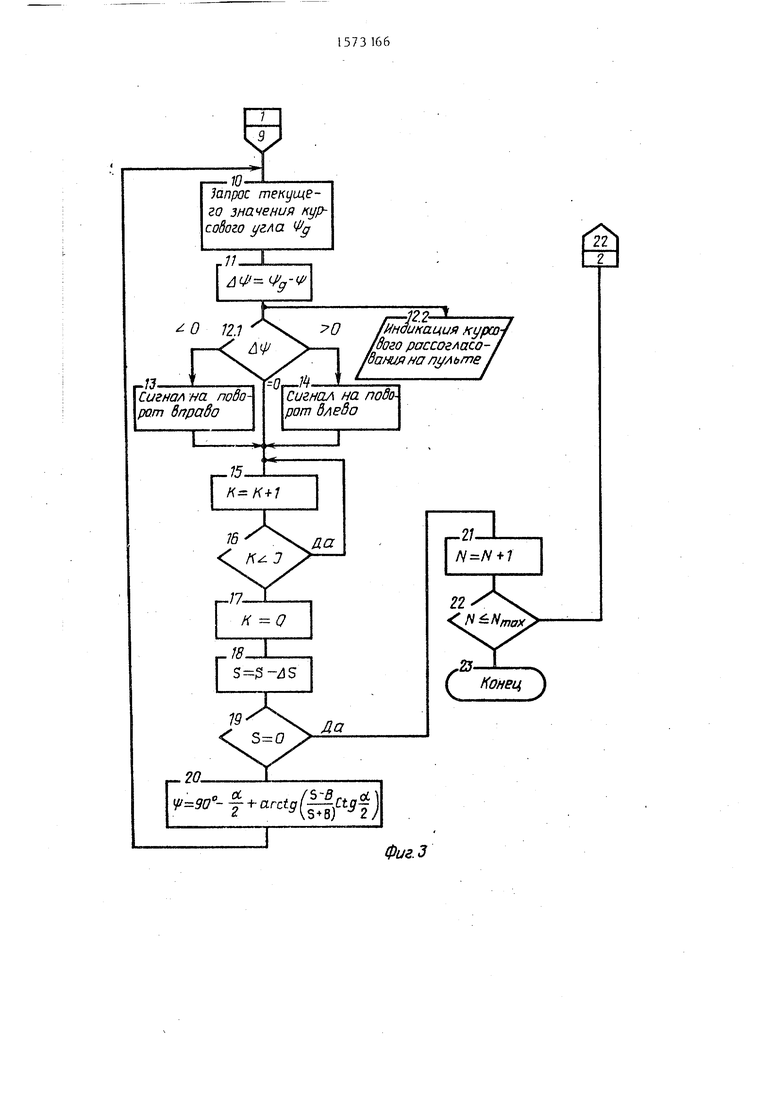
Алгоритм обработки информации в вычислительном блоке может состоять, например, из следующих операций (фиг. 2): начало программы (1); описание переменных, используемых в программе (2); ввод исходных значений (3); А - расстояние между источником авета и машиной, находящейся в исход- н|ой точке; Nmc(X- число прямолинейных участков на траектории движения ма- щины; AS - отрезок пути, после провождения которого определяется курсовое отклонение и производится коррек15731668
сования и управления Д5 (16), происходит обнуление счетчика импульсов измерителя пути при прохождении отрезка Д5 (17); вычисление расстояния до конца N-ro участка траектории S (18)-, проверка оставшегося расстояния до конца N-ro участка траектории (19). Если , то вычисляется расчетный курсовой угол и осуществля - ется переход к элементу 10 (запрос текущего значения курсового угла) (20); если S 0 (N-й участок пройден) , то номер участка траектории
10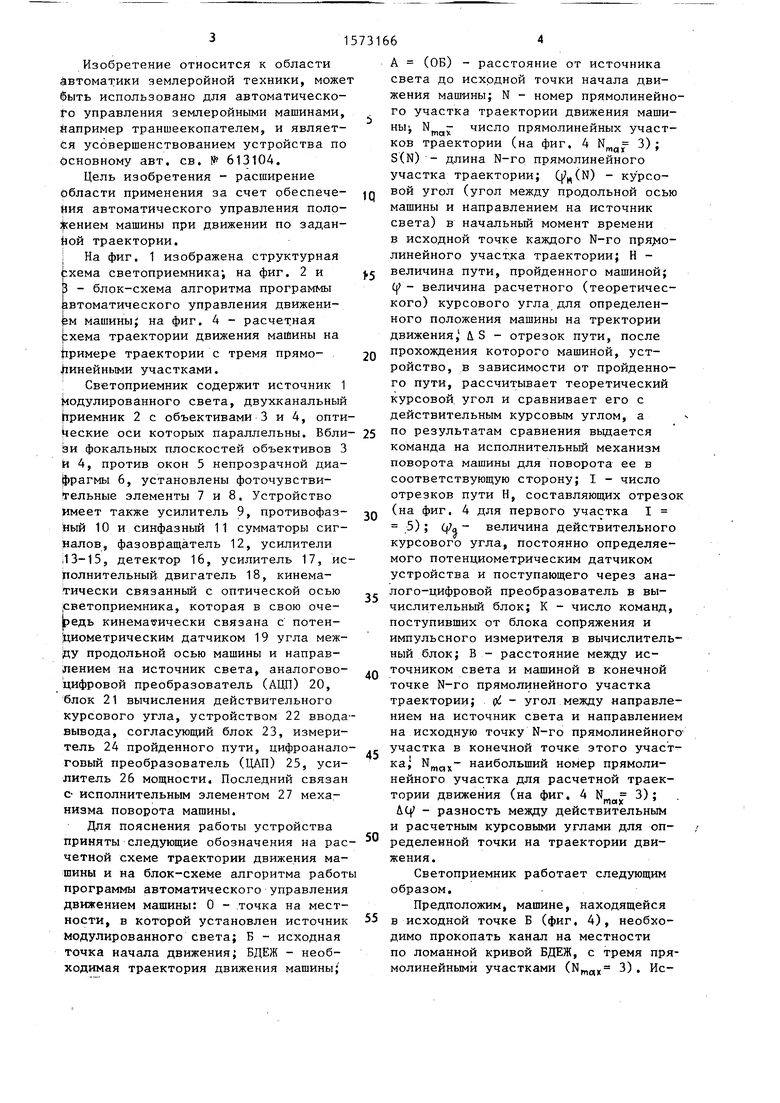
Изобретение относится к автоматизации землеройной техники. Цель изобретения - расширение области применения за счет обеспечения автоматического управления напряжением машины при движении по заданной траектории. Устройство содержит источник 1 модулированного света, двухканальный светоприемник 2 с объективами 3 и 4, усилитель 9, противофазный 10 и синфазный 11 сумматоры сигналов, фазовращатель 12, усилитель 13-15, 17, исполнительный двигатель 18, кинематически связанный с оптической осью светоприемника 2. Дополнительно измеряют угол поворота оптической оси светоприемника 2 между продольной осью машины и направлением на источник света датчиком угла 19. Полученный аналоговый сигнал угла преобразуют в цифровой с помощью АЦП 20 и обрабатывают в блоке 21 вычисления отклонения действительного курсового угла по заданным алгоритмам. Там же обрабатывают информацию, поступающую с устройства 22 ввода-вывода и измерителя 24 пройденного пути, связанного через согласующий блок 23 с блоком 21. Сигнал управления землеройной машины с выхода блока 21 через ЦАП 25 и усилитель 26 мощности поступает на исполнительный элемент 27 механизма поворота машины. 4 ил.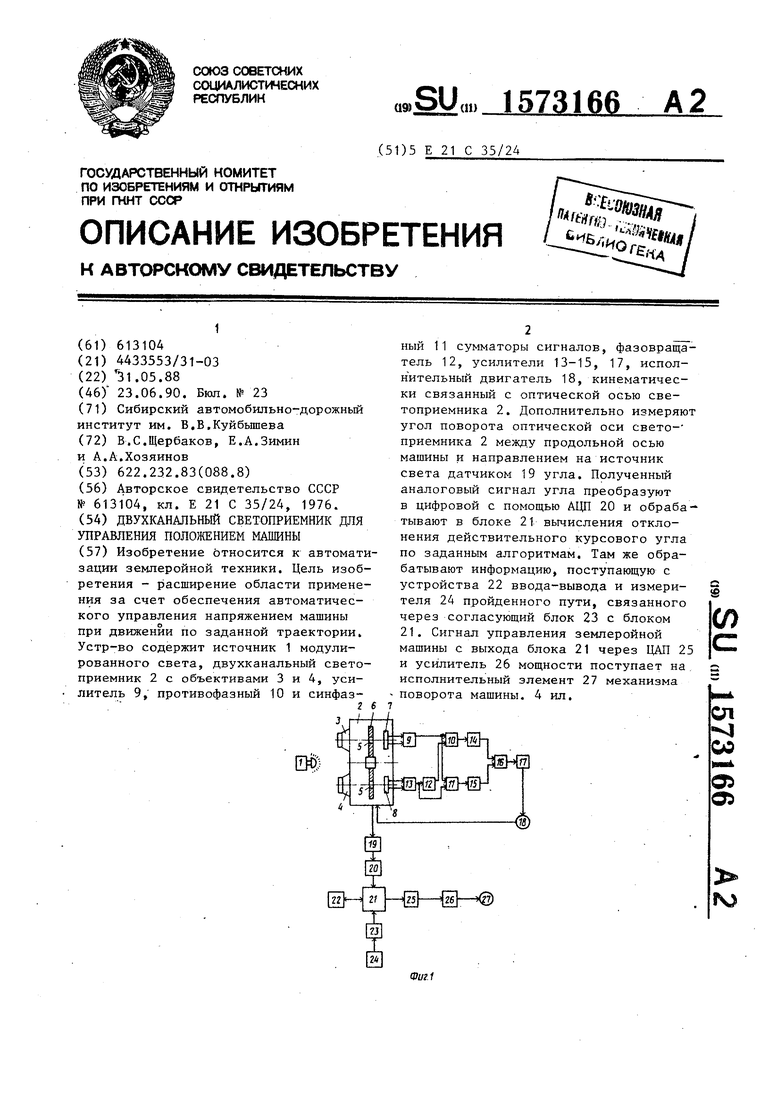
курса движения,; S(N) - длины пря-jr увеличивается на единицу (переход к
35
нелинейных участков траектории дви- ж|ения машины; (N) - начальный курсовой угол для исходной точки и точек i
перехода с одного прямолинейного участка траектории на другой; Н - величи-™ на пройденного машиной пути за период поступления сигналов импульсного из- мерителя пути, включение счетчика |нЬмера прямолинейного участка траектории движения машины (4); обнуление 25 счетчика импульсов от измерителя пу- тр (5); присваивание переменным у, S1 и ДS значений, соответствующих Ni-му участку траектории (6); проверка текущего участка траектории (7). Если зо N1 1, то переменной А присваивается значение В (8); вычисление вспомогательных параметров (9); отрезка В, угла об и количества импульсов Т измерителя пути, соответствующих заданному отрезку измерения для N-ro участка траектории, запрос текущего значения курсового угла i(10), определение разности текущего и расчетного курсовых углов (в начале движения машины на первом или новом участке траектории расчетный курсовой угол + равен начальному углу и„ (Ю соответствующего участка) (11); проверка условия выполнения поворота (12.1); ин- ,- дикаиия курсового рассогласования на пульте машины (12.2); при отрицательном рассогласовании курсового угла подается сигнал на поворот вправо (13); при положительном рассогласовании курсового угла подается сигнал на поворот влево (14).
Описанные выше операции при пуске программы производятся до начала движения машины. После начала движения м ашины включается счетчик импульсов измерителя пути (15); проводится проверка прохождения пути, равного интервалу измерения курсового расеогла40
50
55
(N+0-му участку) (21). Происходит проверка на максимальный номер учас ка траектории. Если N N , то осуществляется переход к элементу 5 (22), если N NWOI)(, то наступает конец программы (23).
Кроме того, существует возможнос прерывания выполнения программы управления оператором с целью ручной коррекции положения машины и коррек ции исходных данных программы управ ления с последующим перезапуском.
Таким образом, после предварител ной разметки траектории движения по карте местности и ввода исходных да ных в вычислительный блок, предлага емое устройство позволяет управлять движением землеройной машины по любой сложной траектории без перестановки источника опорного светового сигнала.
Формула изобретени
Двухканальный светоприемник для управления положением машины по авт св. № 613104, отличающий- с я тем, что, с целью расширения области применения путем обеспечени автоматического управления положени ем машины при движении по заданной траектории, в него введены датчик угла между продольной осью машины и направление на источник света, ан лого-цифровой преобразователь, блок вычисления отклонения действительно го курсового угла, цифроаналоговый преобразователь, усилитель мощности согласующий блок, измеритель пройденного пути и устройство ввода-вывода, входная и выходная шины котор го соединены с соответствующими шин ми блока вычисления отклонения действительного курсового угла, выход
r увеличивается на единицу (переход к
5
5 о -
0
0
5
(N+0-му участку) (21). Происходит проверка на максимальный номер участка траектории. Если N N , то осуществляется переход к элементу 5 (22), если N NWOI)(, то наступает конец программы (23).
Кроме того, существует возможность прерывания выполнения программы управления оператором с целью ручной коррекции положения машины и коррекции исходных данных программы управления с последующим перезапуском.
Таким образом, после предварительной разметки траектории движения по карте местности и ввода исходных данных в вычислительный блок, предлагаемое устройство позволяет управлять движением землеройной машины по любой сложной траектории без перестановки источника опорного светового сигнала.
Формула изобретения
Двухканальный светоприемник для управления положением машины по авт. св. № 613104, отличающий- с я тем, что, с целью расширения области применения путем обеспечения автоматического управления положением машины при движении по заданной траектории, в него введены датчик угла между продольной осью машины и направление на источник света, аналого-цифровой преобразователь, блок вычисления отклонения действительного курсового угла, цифроаналоговый преобразователь, усилитель мощности, согласующий блок, измеритель пройденного пути и устройство ввода-вывода, входная и выходная шины которого соединены с соответствующими шинами блока вычисления отклонения действительного курсового угла, выход
которого через цифроаналоговый преобразователь соединен с входом усилителя мощности, выход датчика угла между продольной осью машины и направлением на источник света через аналого-цифро вой преобразователь соединен с первым
B /A2+S2-2ASCQS
)
JS
fr
5
входом блока вычисления отклонения действительного курсового угла, выход измерителя пройденного пути через согласующий блок соединен с вторым входом блока вычисления отклонения действительного курсового угла.
С Начало j
ввод: lANmu.ASfNJil
Гг
(N)
$ 3(N) (fi)
j
JS
н
ЮЗапрос текущего значения курсового угла Уд
11I
4t/ Vff-V
-J чаи
V2--L
/Индикация /rt//xoj /даго рассогласо- (Вания на пульте
Ог-Я
Сигнал на подоГ
р ро
porn длебо
I
Г
(,
-J чаи
V2--L
дикация о рассогл я на пуль
С Конец Л
Фиг.З
| Двухканальный светоприемник для управления положением машины | 1976 |
|
SU613104A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
