ЧГ14
13 19 J5
Jiо
ны до совпадения величин радиусов, при этом регулирование радиуса кривизны оси сооружения в плане, угла поперечного перекоса и высоты подъема-опускания отвала осуществляют автоматически, для чего используют блок упр.авления, комплект измерителей скоростей машины и двухосный стабилизатор. Устройство, осуществляющее способ, состоит из отвала 1, стабилизатора 7 со стабилизированной платформой 8, которая посредством двух шарниров с осями 9 и 10 соединена с нерабочей поверхностью 11 отвала, гидроцилиндров 12 продольного и 13 поперечного поворота платформы 8, электрогидрораспределителей 14 и 15 к ним, преобразователей угла 16,
17, при этом блок управления 6 связан через преобразователи 16, 17 соответственно с электрогидрорегуляторами 14, 15; которые гидромагистралями 18, 19 связаны с гидроцилиндром 12 продольного и с гидроцилиндром 13 поперечного поворота стабилизированной платформы 8 и непосредственносвязан с комплектом 20 измерителей скоростей; при этом двухосный стабилизатор 7 имеет электрическую связь с электрогидрорегуляторами 3 и 2, которые гидромагистралями связаны соответственно с гидроцйлиндрами 5 подъема-опускания отвала 1 и 4 - его перекоса, что обеспечивает полную автоматизацию профилирования поверхности. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления рабочим органом землеройной машины | 1990 |
|
SU1776732A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| Стенд для испытаний землеройно-транспортных машин | 1986 |
|
SU1432367A1 |
| Способ автоматического управления работой бульдозера | 1990 |
|
SU1810441A1 |
| Бульдозер с поворотным отвалом | 1987 |
|
SU1565974A1 |
| ДОРОЖНЫЙ СТАБИЛИЗАТОР НА БАЗЕ АВТОГРЕЙДЕРНОГО ШАССИ | 1997 |
|
RU2167973C2 |
| Землеройно-транспортная машина | 1990 |
|
SU1773980A1 |
| Бульдозерное оборудование | 1987 |
|
SU1518459A1 |
| Бульдозер | 1990 |
|
SU1749392A1 |

Изобретение относится к землеройным машинам, в частности к способам профилирования поверхностей зёмляны>&1^ сооруже-у*. ;.. .', 2' • •'НИИ, к автоматическим устройствам для управления землеройными машинами, И м.б. использовано при планировке автомобильных дорог. Цель изобретения - повышение качества профилирования поверхности дороги путем улучшения ее геометрических форм. Способ профилирования заключается в том, что дополнительно разрабатывают математические модели изменения высотных отметок, изменения уклонов образующих поверхности, изменения в плане радиуса осевой линии по всей длине сооружения, а во время работы землеройной машины определяют действительный радиус осевой линии, сравнивают его с расчетным по проекту и корректируют движение маши-/t/>&с±
Изобретение относится к землеройным машинам, в частности к способам профилирования поверхностей земляных сооружений, к автоматическим устройствам для управления землеройными машинами и может Ьыть ис.пользовано при планировке полотна автомобильных дорог и т.д.
Цель изобретения - повышение кауества профилирования поверхности и дороги путем улучшения ее геометрических форм.
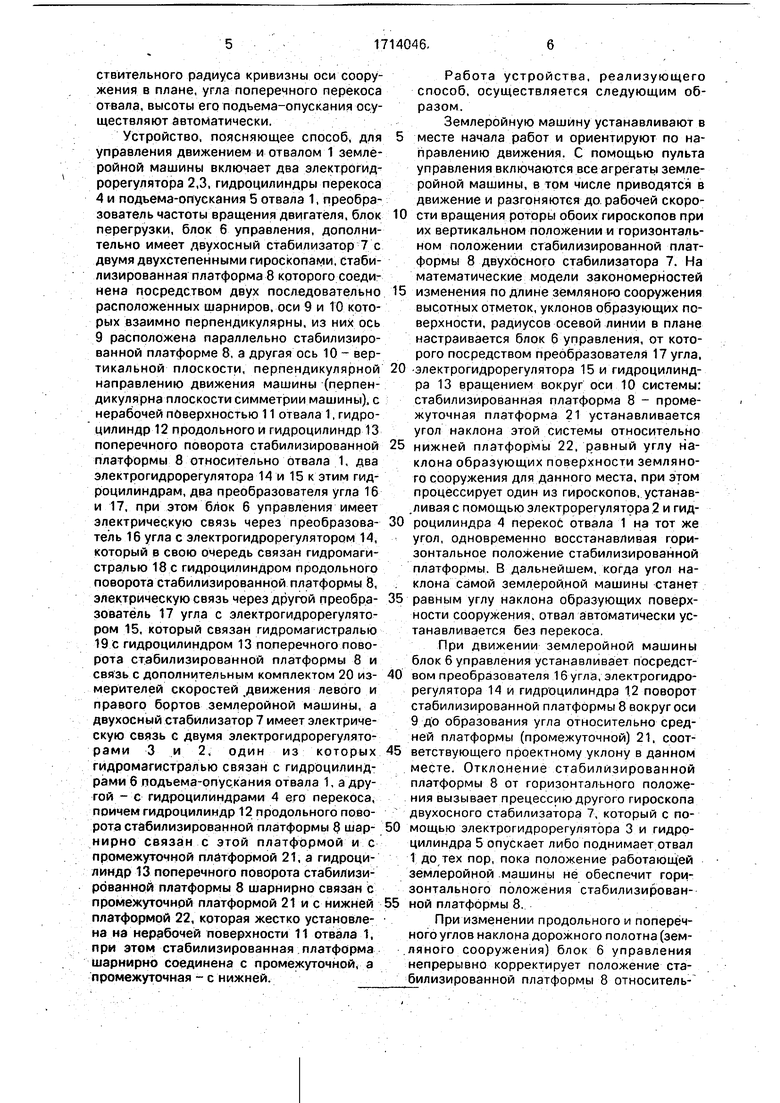
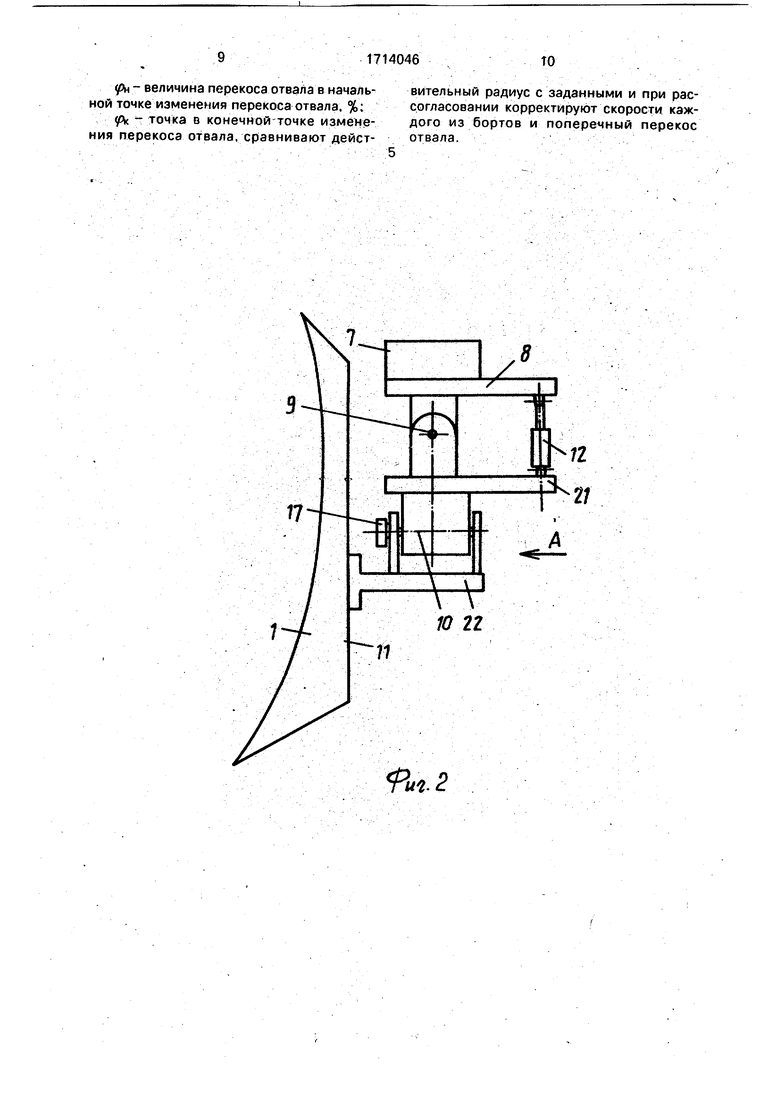
На фиг, 1 показано автоматическое устройство для управления движением и отвалом землеройной машины, поясняющее способ; на фиг. 2 - соединение двухосного стабилизатора с отвалом землеройной машинь1; на фиг. 3 - вид А на фиг. 2.
Цель достигается тем, что в способе профилирования поверхности, например полотна автомобильной дороги, с помощью землеройной, машины, снабженной автоматическим устройством, обеспечи вающим регулирование глубины копания в соответствии с заданными продольными уклонами, разрабатывают математические модели изменения высотных отметок, изменения уклонов образующих поверхности, изменения в плане радиуса осевой линии по всей длине земляного сооружения, например автомобильной дороги, а во время работы землеройной машины находят действительные скорости движения каждого ее борта и на их основе действительный радиус осевой линии сооружения в плане, который определяют по формуле
ViL
-
cos p,
+ AR - vi V2
где V| - скорость движения одного борта, например левого, землеройной машины;
V2 - скорость движения другого борта машины;
L - расстояние между бортами, между
и: мерителями скорости;
AR - удаление одного из бортов от осевой линии;
(р - угол поперечного уклона образующих поверхности сооружения,
угол поперечного перекоса отвила землеройной машины, который для клотоидной трассы на прямолинейных и круговых в плане участках дороги устанавливают постоянным по отношению к горизонтальному уровню, а на участках, где радиус кривизны в плане переменный, определяют по формуле
у5н +( -y)(3 -2
где As- величина пройденного по оси дороги расстояния от начальной точки изменения перекоса отвала, м;
S - длина дуги участка оси дороги, м, на котором изменяется перекос отвала; - величина перекоса отвала, %, в начальной точке изменения перекоса отвала;
- то же, в конечной точке изменения перекоса отвала,
причем сравнивают полученный действительный радиус с расчетным и корректируют разность скоростей Vi и V2 совпадения этих радиусов, при этом регулирование во время движения землеройной машины дёйствительного радиуса кривизны оси сооружения в плане, угла поперечного перекоса отвала, высоты его подъема-опускания осуществляют автоматически.
Устройство, поясняющее способ, для управления движением и отвалом 1 землеройной машины включает два электрогидрорегулятора 2,3, гидроцилиндры перекоса 4 и подъема-опускания 5 отвала 1, преобразователь частоты вращения двигателя, блок перегрузки, блок 6 управления, дополнительно имеет двухосный стабилизатор 7 с двумя двухстепенными гироскопами, стабилизированная платформа 8 которого соединена посредством двух последовательно расположенных шарниров, оси 9 и ТО которых взаимно перпендикулярны, из них ось 9 расположена параллельно стабилизированной платформе 8, а другая ось Ю - вертикальной плоскости, перпендикулярной направлению движения машины (перпендикулярна плоскости симметрии машины), с нерабочей пйвepxнoctью 11 отвала 1, гидроцилиндр 12 прюдольного и гидроцилиндр 13 поперечного поворота стабилизированной платформы 8 относительно отвала 1, два электрогидрорегулятора 14 и 15 к этим гидроцилиндрам, два преобразователя угла 16 и 17, при этом блок 6 управления имеет электрическую связь через преобразователь 16 угла с электрогидрорегулятором 14, который в свою очередь связан гидромагистралью 18с гидроцилиндром продольного поворота стабилизированной платформы В, электрическую связь через другой преобразователь 17 угла с электрогидрорегулятором 15, который связан гидромагистралью 19 с гидроцилиндром 13 поперечного поворота стабилизированной платформы В и свяаь с дополнительным комплектом 20 измерителей скоростей движения левого и правого бортов землеройной машины, а двухосный стабилизатор 7 имеет электрическую связь с двумя электрогидрорегуляторами 3 и 2, один из которых гидромагистралью связан с гидроцилиндрами б подъема-опус.кания отвала 1, а другой - с гидроцилиндрами 4 его перекоса, причем гидроцилиндр 12 продольного поворота стабилизированной платформы 8 шарнирно связан с этой плaтфt pмoй и с промежуточной плйтформой 21, а гидроцилиндр 13 поперечного поворота стабилизированной платформы 8 шарНирно связан с промежуточной платформой 21 и с нижней платформой 22, которая жестко установлена на нерабочей поверхности 11 отвала 1, при этом стабилизированная.платформа шарнирно соединена с промежуточной, а промежуточная - с нижней.
Работа устройства, реализующего способ, осуществляется следующим образом.
Землеройную машину устанавливают в 5 месте начала работ и ориентируют по направлению движения. С помощью пульта управления включаются все агрегать землеройной машины, в том числе приводятся в движение и разгоняются до рабочей скорости вращения роТоры обоих гироскопов при их вертикальном положении и горизонтальном положении стабилизированной платформы 8 двухосного стабилизатора 7. На математические модели закономерностей
15 изменения по длине земляного сооружения высотных отметок, уклонов образующих поверхности, радиусов осевой линии в плане настраивается блок 6 управления, от которого посредством преобразователя 17 угла,
0 .электрогидрорегулятора 15 и гидроцилиндра 13 вращением вокруг оси 10 системы: стабилизированная платформа 8 - промежуточная платформа 21 устанавливается угол наклона этой системы относительно
5 нижней платформы 22, равный углу наклона образующих поверхности земляного сооружения для данного места, при процёссирует один из гироскопов, устанав.ливая с помощью электрорегулятора 2 и гид0 роцилиндра 4 перекоб отвала 1 на тот же угол, одновременно восстанавливая горизонтальное положение стабилизированной платформы. В дальнейшем, когда угол наклона самой землеройной машины станет
5 равным углу наклона образующих поверхности сооружения, отвал автоматически устанавливается без перекоса.
При движении землеройной машины блок 6 управления устанавливает посредством преобразователя 16 угла, электрогидрорегулятора 14 и гидроцилиндра 12 поворот стабилизированной платформы 8 вокруг оси 9 до образования угла относительно средней платформы (промежуточной) 21, соот5 ветствующего проектному уклону в данном месте. Отклонение стабилизированной платформы 8 от горизонтального положения вызывает прецессию другого гироскопа двухосного стабилизатора 7. который с помощью электрогидрорегулятора 3 и гидроцилиндра 5 опускает либо поднимает отвал 1 до тех пор, пока положение работающей землеройной .машины не обеспечит горизонтального положения стабилизированной платформы 8.
При изменении продольного и поперечного углов наклона дорожного полотна (зем.ляноГо сооружения) блок 6 управления непрерывно корректирует положение стабилизированной платформы 8 относительо отвала 1, в результатов чего обеспечиваетя автоматическое профилирование поверности сооружения в соответствии с роектными данными. Одновременно измеители 20 устанавливают действительные корости движения каждого борта землеойной машины, на основании которых по ормуле
Rg ( +AR)cosy,
деУ| - скорость, например, левого борта, фиксируемая одним измepитeлeм
V2 - скорость правого борта, фиксируемая другим измерителем;
L - расстояние между измерителями скорости;
Л R - расстояние от одного из измерителей до осевой линии дороги (земляного сооружения);
р - угол поперечного уклона образующих поверхности дороги, который вычисляют по формуле
у V5H +(VV -)(3 -2 -)-.
,., . . . - / Ъ . .
- . - . , .
где As - величина пройденного по оси дороги расстояния от начальной точки изменения перекоса . м;
S - длина дуги участка оси дороги, на котором изменяется величина перекоса отвала, м;
у)н - величина перекоса отвала в начальной точке изменения перекоса отвала, %;
jpK - то же, в конечной изменения перекоса отвала,
определяется действительный радиус осевой линии в плане, который сравнивается с проектным для данного места, и уточняется разница скоростей левого и правого бортов машины до момента совпадения величин радиусов заданного: И действительного, при этом землеройная машина перемещается таким образом, что один из измерителей скорости движется над осевой линией дороги либо парал/(1ельно этой линии на расстоянии ДН, повторяя все ее повороты.
При увеличении нагрузки на землеройную машину уменьшение чйСла оборотов двигателя ниже допустимого фиксируется ореобразователе| частоты вращения, от которого сигнал подается на блок перегрузки, автоматически отсоединяющий двигатель от трансмиссш и переключающий его на холостой ход. Все операции землеройная маийжа в%1полняет в автоматическом режиме, В1следствйе чего обязанности механика
водятся к функциям контроля за работой и регулировки режима работы.
Формул а и 3 обретени я
, , : : - -.;-,
Способ профилирования поверхности емляных сооружений землеройной машиной, включающий формирование сигнала адания глубины копания рабочего органа в
оответствии с заданным продольным уклоном, сравнение того сигнала с сигналом атчика глубины копания и при рассогласовании этих сигналов формирование сигнала управления рабочим органом, отличаюЩ и и с я тем. что. с целью повышения качества Т1рофилиррвания поверхности дороги путем улучшения ее геометрических форм, задают согласно плану изменения высотных отметок, изменения уклонов. o6paiзующих Поверхности земляного сооружения.: изменения в плане радиуса осевой линии по всей длине земляного сооружения, измеряют действительные скорости движения каждого из бортов
землеройкой машины, задают расстояние между бортами землеройной машины, на основании зтих величин определяют действительный радиус осевой линии по формуле
:,.:/..:..;,: : :. . R3 ( уУ1л/2 )
где V) - скоррсть движения одного борта землеройной машины;
V2 - скорость движения другого борта; ., : ,: .ч - -..,/:. -; , - . ..-.; L - расстояние между бортами, между измерителями скорости; Д R - удаление одного из бортов от осевой линии;
- угол поперечного уклона образующих поверхности сооружения, угол поперечного перекоса отвала зёмлеройной машины, который для клотоидной трассы на прямолинейных и круговых в плане участках дороги устанавливают постоянным по отношению к горизонтальному уровню, а на участках, где радиус кривизны в плане переменный, определяют по формулё :. ,-. . .: : . .... „
+(-)(3-2-)-,
,... /,.-,,., . . - , . о
где Д8 - величина пройденного по оси дороги расстояния От начальной точки изменения перекоса отвала, м;
S - Длина дуги участка оси дороги, м;
(рн- величина перекоса отвала в начальной точке изменения перекоса отвала. %:
(рт точка в конечнойточке изменения перекоса отвала, сравнивают действительный радиус с заданными и при рассогласовании корректируют скорости каждого из бортов и поперечный перекос отвала.
8
0US.d
| i Плешков/Д.И | |||
| и др | |||
| Бульдозеры скреперы, грейдеры | |||
| М.: Высшая школа, 1980, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
