1
(2)) 4481096/25-08 (22) 08.09.88 (46) 23.07. 90. Бюл. № 27
(71)Московское специальное конструкторское бюро автоматических линий
и специальных станков
(72)Ю.Н.Валуев и В.В.Либерт
(53)62-229.6 (088.8)
(56)Патент ФРГ № 1237005, кл. 81с -82/02, 1967.
(54) ЗАГРУЗОЧНОЕ УСТРОЙСТВО
(57)Изобретение относится к машиностроению и предназначено для автоматизации загрузочных операций. Целью
изобретения является повышение надежности работы устройства за счет обеспечения фиксации тактового стола в момент загрузки деталей. Загрузка деталями кассеты 3 происходит из одной точки (из подающего лотка в центре тактового стола) Перемещение стола в двух взаимно перпендикулярных направлениях производится посредством двух мальтийских механизмов, один крест 21 которых кинематически, связан с рейкой 7, а другой крест 22 - с рейкой 8, При этом водило 30 с пальцем 31 связано с приводом. 10 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения толщины покрытия катода цветного кинескопа | 1989 |
|
SU1711257A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| УСТРОЙСТВО для ЗАГРУЗКИ СУШИЛЬНЫХ КАССЕТ МНОГОКАНАЛЬНОЙ ЩЕЛЕВОЙ ПЕЧИ | 1972 |
|
SU327058A1 |
| Устройство для мойки, стерилизации и сушки сосудов | 1978 |
|
SU747810A1 |
| Устройство для упаковки радиодеталей | 1979 |
|
SU865704A1 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Автоматическая линия для изготовления объемных изделий | 1988 |
|
SU1590340A1 |
| Загрузочное устройство | 1990 |
|
SU1738594A1 |
| Станок для снятия заусенцев с внутренних поверхностей цилиндрических деталей | 1983 |
|
SU1113215A1 |
| Устройство для намотки полых якорей электрических машин | 1986 |
|
SU1436204A1 |
Изобретение относится к машиностроению и предназначено для автоматизации загрузочных операций. Целью изобретения является повышение надежности работы устройства за счет обеспечения фиксации тактового стола в момент загрузки деталей. Загрузка деталями кассеты 3 происходит из одной точки (из подающего лотка в центре тактового стола). Перемещение стола в двух взаимно перпендикулярных направлениях производится посредством двух мальтийских механизмов, один крест 21 которых кинематически связан с рейкой 7, а другой крест 22 - с рейкой 8. При этом водило 30 с пальцем 31 связано с приводом. 10 ил.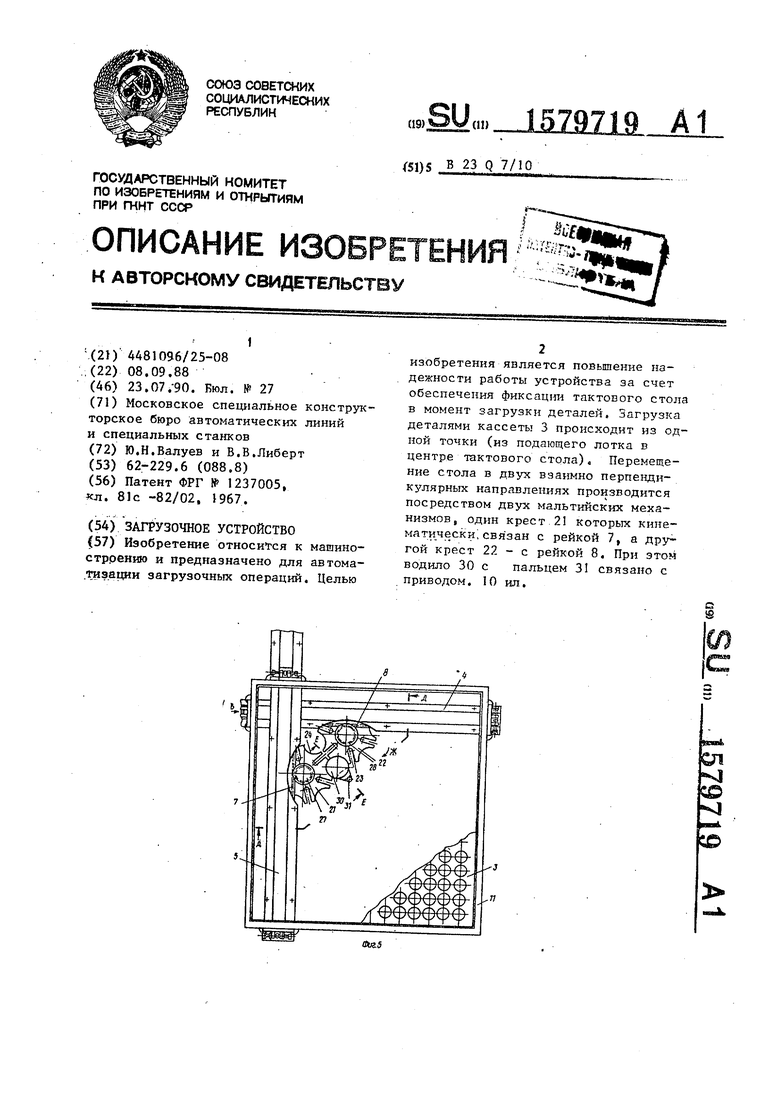
anjis
Изобретение относится к машиностроению, и предназначено для автоматизации загрузочных операций.
Цель изобретения - повышение на- дежности работы устройства за счет обеспечения фиксации тактового стола в момент загрузки деталей.
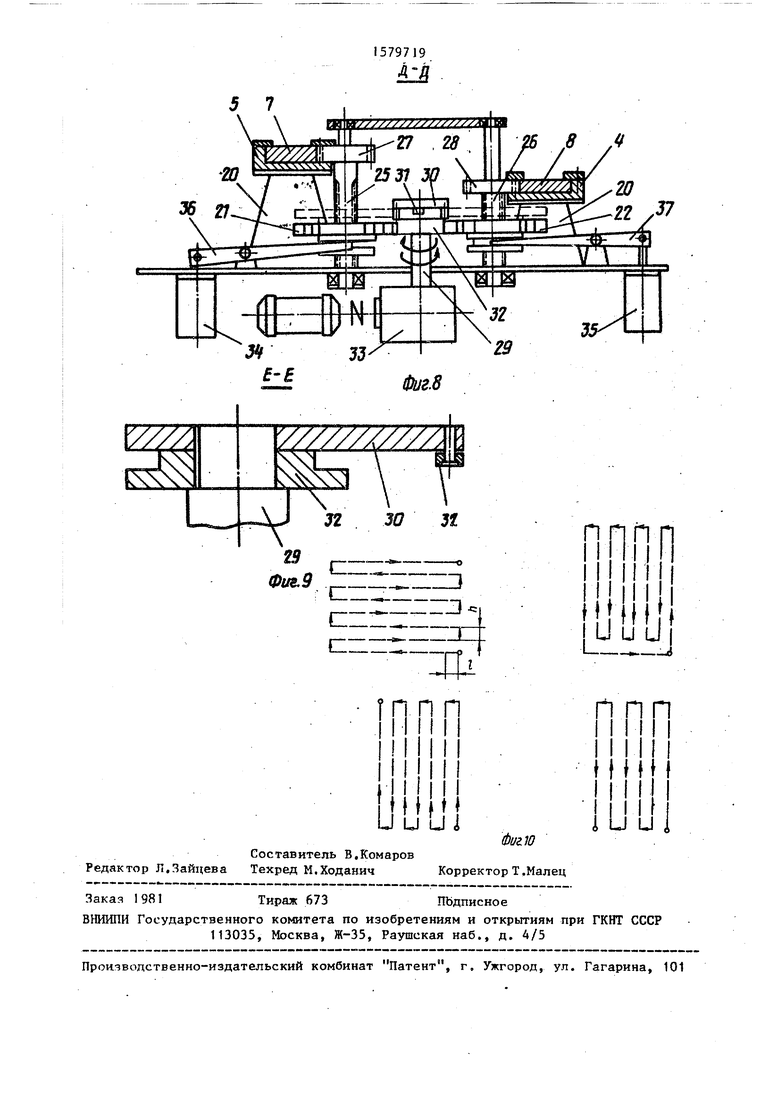
На фиг.1 изображено устройство, общий вид; на фиг.2 - то же, с ис- ходным расположением кассеты в 1-й четверти, вид сверху; на фиг.З - вид А на фиг.2; на фиг.4 - сечение Б-Б на фиг.З; на фиг.З - устройство с расположением кассеты в ffl-й чет- верти, вид сверху; на фиг,6 - вид В на фиг.З; на фиг.7 -разрез Г-Г на фиг,6; на фиг.8 - разрез Д-Д на фиг.З; на фиг.9 - разрез Е-Е на фиг.З; на фиг.10 - возможные траекто рии движения тактового стола с кассетой
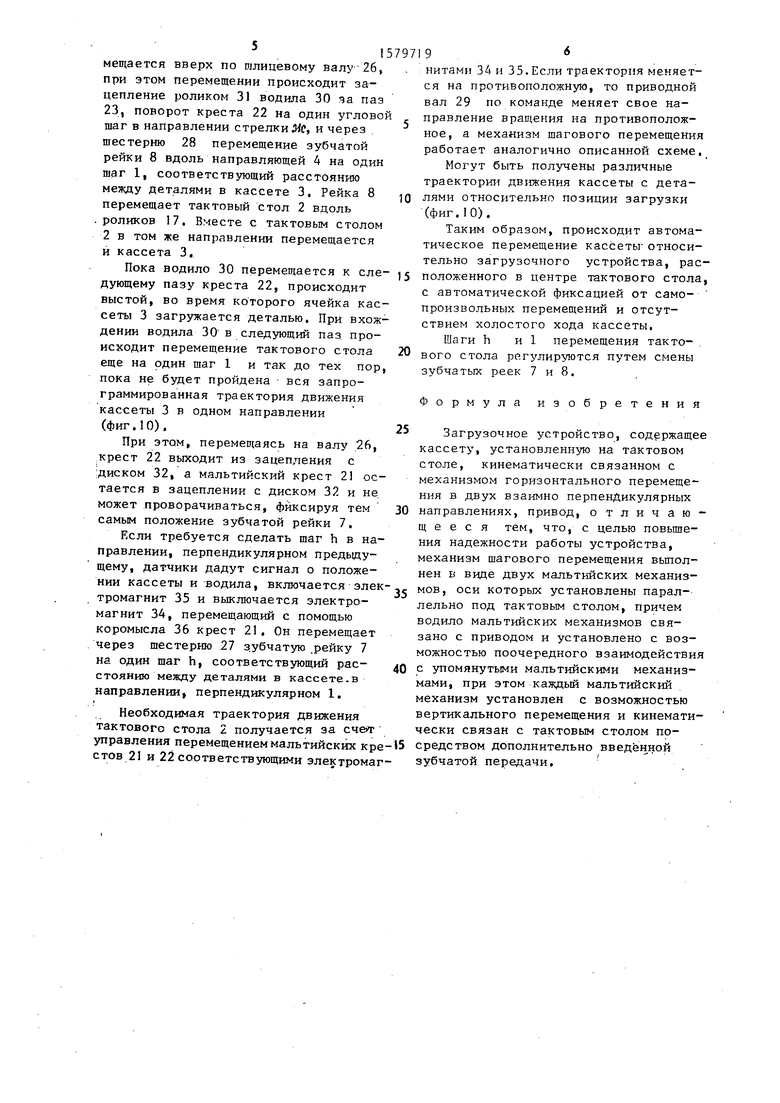
Загрузочное устройство содержит станину 1, тактовьй стол 2 с кассетой 3 для деталей, направляющие 4 и 5, механизм шагового перемещения с зубчатыми рейками 7 и 8, подающий лоток 9 (фиг„1 и 2). Подающий лоток 9 неподвижно установлен в центре тактового стола.20 Кассета 3 для загружаемых деталей фиксируется на тактовом столе 2 с помощью ограничителей 10с возможностью съема и замены (фиг.З и 4). Кассета 3 выполнена таким образом, что ее поперечные размеры а в плане больше половины соответствующих поперечных размеров b в плане тактового стола 2 на величину k, не превышающую расстояний 1 и h между ячейками в кассете,
т.е. а - - k, где kjЈlf h.
Такая форма выполнения необходима для того, чтобы кассета всегда находилась в зоне подающего лотка 9 хотя бы одной ячейкой и могла осу- ществиться любая из запрограммированных траекторий движения кассеты.
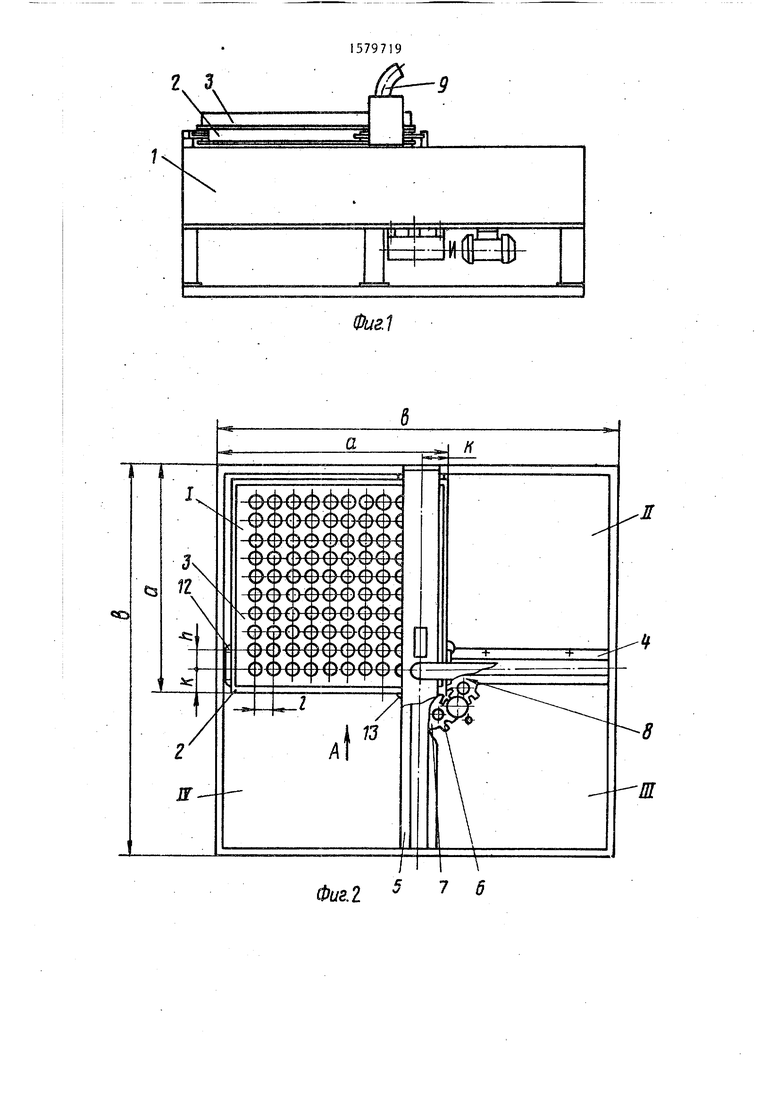
Тактовый стол 2 представляет собой раму 11, которая установлена с воз- можностью порагового перемещения в двух взаимно перпендикулярных направлениях на группах 12 и 13 роликов и образована взаимно перпендикулярными направляющими 14 и 15 (фиг.З, 5 - 7) Ролики 1 б и 17 в каждой группе расположены взаимно перпендикулярно. Ролики 16 в группах 12 и 13 находятся в контакте с направляющими 14 рамы
11 и являются опорными для нее, а ролики 17 в группах 12 и 13 находятсг в контакте с направляющими 15 и явля- ются перемещающими (фиг,6 и 7), Группа 12 роликов установлена в кронштейнах 18, укрепленных на концах зубчатой рейки 8, а группа роликов 13 - на кронштейнах 19, укрепленных на концах зубчатой рейки 7. Направляющие 4 и 5 установлены на станине 1 на стойках 20. Механизм 6 шагового перемещения состоит из двух мальтийских механизмов с крестами 21 и 22, пазами 23 и фиксирующими выемками 24, каждый из которых установлен на шлицевых валах 25 и 26 соответственно. Кроме того, на каждом из шлицевых валах 25 и 26 установлены соответственно шестерни 27 и 28, входящие в зацепление с зубчатыми рейками 7 и 8. Между крестами 21 и 22 на приводном валу 29 установлено общее водило 30 с роликом 31. На валу 29 и соосно с водилом 30 установлен ступенчатый диск 32 для фиксации положения крестов 21 и 22 по наружным выемкам 24 мальтийских крестов, выполненных между пазами 23 (фиг.2 и 8) Водило 30 приводится в движение от редуктора 33 с асинхронным двигателем, Кресты 21 и 22 перемещаются вдоль шлицевых валов 25 и 26 с помощью электромагнитов 34 и 35 через коромысла 36 и 37.
Загрузочное устройство работает следующим образом.
Загрузка деталями кассеты 3 происходит из подающего лотка 9 в центре тактового стола 2. Кассета 3 фиксируется на тактовом столе 2 с помощью ограничителей 10. При включении двигателя вал 29 вращается совместно с водилом 30. Оба креста 21 и 22 могут находиться в крайнем нижнем положении, и диск 32 плотно входит в наружные выемки двух крестов 21 и 22, расположенных на одинаковой высоте. Это является фиксацией от самопроизвольного проворачивания их и перемещения тактового стола 2.
Когда датчик, установленный в позиции загрузки (не показано), дает сигнал о наличии детали и требуется переместить кассету 3, например, на шаг, равный 1, соответствующий расстоянию между ячейками кассеты 3, то включается электромагнит 35, и крест 22 с помощью коромысла 37 переJ15
мещается вверх по юлицевому валу 26, при этом перемещении происходит зацепление роликом 31 водила 30 эа паз 23, поворот креста 22 на один угловой шаг в направлении стрелки Дй, и через шестерню 28 перемещение зубчатой рейки 8 вдоль направляющей 4 на один шаг 1, соответствующий расстоянию между деталями в кассете 3. Рейка 8 перемещает тактовый стол 2 вдоль роликов 17. Вместе с тактовым столом 2 в том же направлении перемещается и кассета 3.
Пока водило 30 перемещается к еле- дующему пазу креста 22, происходит выстой, во время которого ячейка кассеты 3 загружается деталью. При вхождении водила 30 в следующий паз происходит перемещение тактового стола еще на один шаг 1 и так до тех пор, пока не будет пройдена вся запрограммированная траектория движения кассеты 3 в одном направлении (фиг.10).
При этом, перемещаясь на валу 26, крест 22 выходит из зацепления с .диском 32, а мальтийский крест 21 остается в зацеплении с диском 32 и не может проворачиваться, фиксируя тем самым положение зубчатой рейки 7.
Если требуется сделать шаг h в направлении, перпендикулярном предыдущему, датчики дадут сигнал о положении кассеты и водила, включается электромагнит 35 и выключается электромагнит 34, перемещающий с помощью коромысла 36 крест 21. Он перемещает через шестерню 27 зубчатую рейку 7
на один шаг h, соответствующий расстоянию между деталями в кассете.в направлении, перпендикулярном 1.
Необходимая траектория движения тактового стола 2 получается за управления перемещением мальтийских кре-15 стов 21 и 22 соответствующими электромаг
«
е
0
5
0
5
0
15
196
нитами 34 и 35.Если траектория меняется на противоположную, то приводной вал 29 по команде меняет свое направление вращения на противоположное, а механизм шагового перемещения работает аналогично описанной схеме.
Могут быть получены различные траектории движения кассеты с деталями относительно позиции загрузки (Фиг. 10).
Таким образом, происходит автоматическое перемещение кассеты- относительно загрузочного устройства, расположенного в центре тактового стола, с автоматической фиксацией от самопроизвольных перемещений и отсутствием холостого хода кассеты.
Шаги h и 1 перемещения тактового стола регулируются путем смены зубчатых реек 7 и 8.
Формула изобретения
Загрузочное устройство, содержащее кассету, установленную на тактовом столе, кинематически связанном с механизмом горизонтального перемещения в двух взаимно перпендикулярных направлениях, привод, о тличаю- щ е е с я тем, что, с целью повышения надежности работы устройства, механизм шагового перемещения выполнен v виде двух мальтийских механизмов, оси которых установлены параллельно под тактовым столом, причем водило мальтийских механизмов связано с приводом и установлено с возможностью поочередного взаимодействия с упомянутыми мальтийскими механизмами, при этом каждый мальтийский механизм установлен с возможностью вертикального перемещения и кинематически связан с тактовым столом посредством дополнительно введённой зубчатой передачи.
I
х
е хрбфофш
Фиг. 2
а
к
-Л
7 6
ES&3
15 14
Г Г
Фиг. 7
5 7
Е-Ј
Фиг.8
гг
п п
