Изобретение относится к обработке металлов давлением,, а именно к многопозиционным высокоскоростным и штамповочным автоматам.
Цель изобретения - повышение надежности работы автомата за счет повышения быстродействия механизма аварийного разрыва кинематической связи клещевых захватов с приводным кулаком.
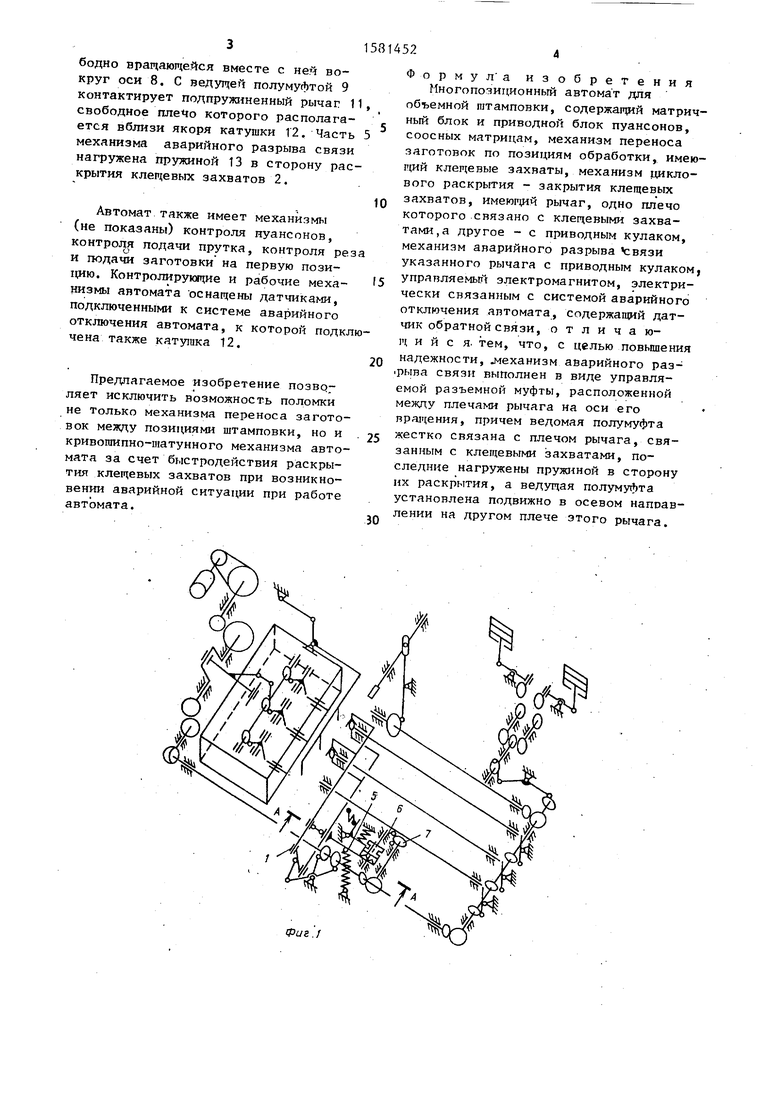
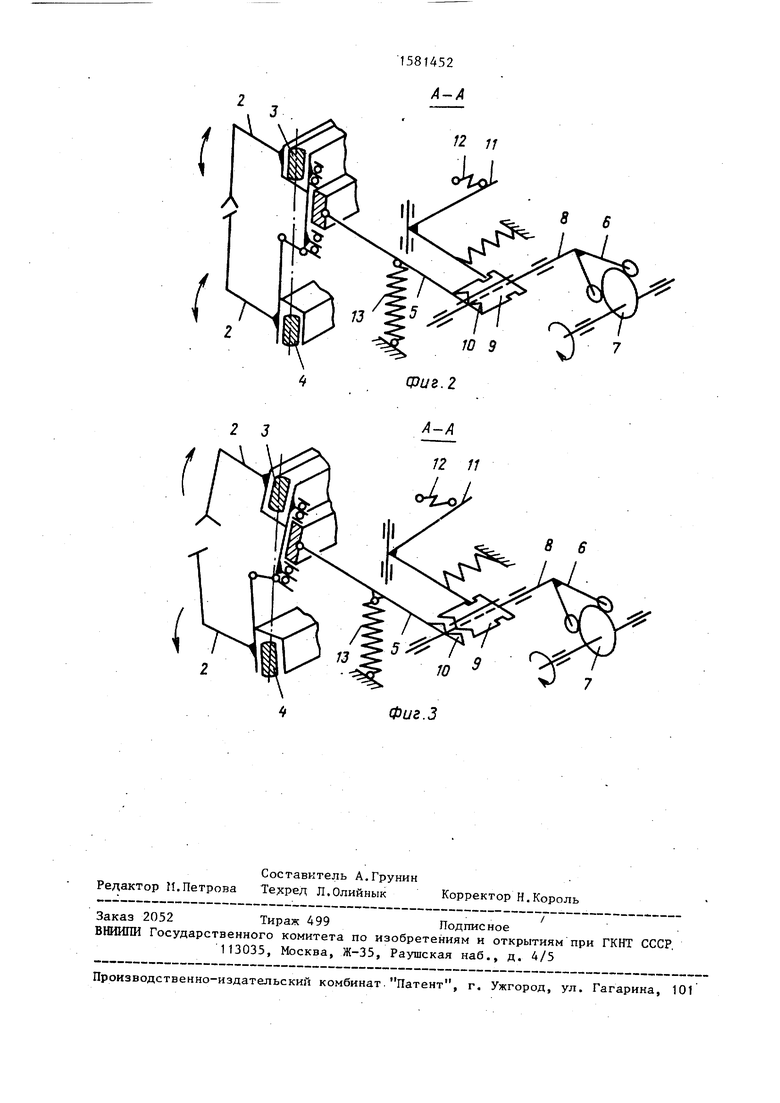
На Лиг. 1 показана кинематическая схема многопозиционного холодноштам- повочного автомата; на фиг. 2 - сечение А-А на фиг.1 (механизм раскрытия клещей, клещи сомкнуты); на Лиг. 3 - то же, механизм раскрытия клещей при аварийной ситуации.
Автомат содержит матричный блок и приводной блок пуансонов, механизм аварийного раскрытия клещевых
захватов, состоящий из механизма 1 переноса заготовок (Лиг. 1) с позиции на позицию с клещевыми захватами 2, установленными с возможностью совместного перемещения по двум направляющим штангам 3 и 4 (Лиг. 2 и 3), расположенным вдоль Лронта рабочих позиций. Клещевые захваты 2 через части 5 и 6, образующие плечи рычага,соединены с механизмом циклового раскрытия - закрытия захватов - кулаком 7. Части 5 и 6 расположены на одной оси 8 вращения и связаны одна с другой посредством кулачковой мубты, состоящей из ведущей полумуЛ- ты 9, соединенной, например, с помощью шлицев с осью 8 части 6 рычага и свободно перемещающейся вдопь этой оси, и ведомой полумуЛты 10, соединенной с частью 5 рычага и своС7
ос
2
Сг
к
бодно вращающейся вместе с ней вокруг оси 8. С ведущей полумуЛтой 9 контактирует подпружиненный рычаг 11 свободное плечо которого располагается вблизи якоря катушки 12. Часть механизма аварийного разрыва связи нагружена пружиной 13 в сторону раскрытия клещевых захватов 2.
Автомат также имеет механизмы (не показаны) контроля пуансонов, контроля подачи прутка, контроля рез и подачи заготовки на первую позицию. Контролирующие и рабочие механизмы автомата оснащены датчиками, подключенными к системе аварийного отключения автомата, к которой подклчена также катушка 12.
Предлагаемое изобретение позволяет исключить возможность поломки не только механизма переноса заготовок между позициями штамповки, но и кривогаипно-шатунного механизма автомата за счет быстродействия раскрытия клещевых захватов при возникновении аварийной ситуации при работе автомата.
0
5
0
5
0
Формула изобретения
Многопозиционный автомат для объемной штамповки, содержащий матричный блок и приводной блок пуансонов, соосных матрицам, механизм переноса заготовок по позициям обработки, имеющий клещевые захваты, механизм циклового раскрытия - закрытия клещевых захватов, имеющий рычаг, одно плечо которого связано с клещевыми захватами, а другое - с приводным кулаком, механизм аварийного разрыва Ч:вязи указанного рычага с приводным кулаком, управляемый электромагнитом, электрически связанным с системой аварийного отключения автомата, содержащий датчик обратной связи, отличающийся тем, что, с целью повышения
надежности, .механизм аварийного раэ- .рыва связи выполнен в виде управляемой разъемной муфты, расположенной между плечами рычага на оси его вращения, причем ведомая полумуфта жестко связана с плечом рычага, связанным с клещевыми захватами, последние нагружены пружиной в сторону их раскрытия, а ведущая полумуфта установлена подвижно в осевом направлении на другом плече этого рычага.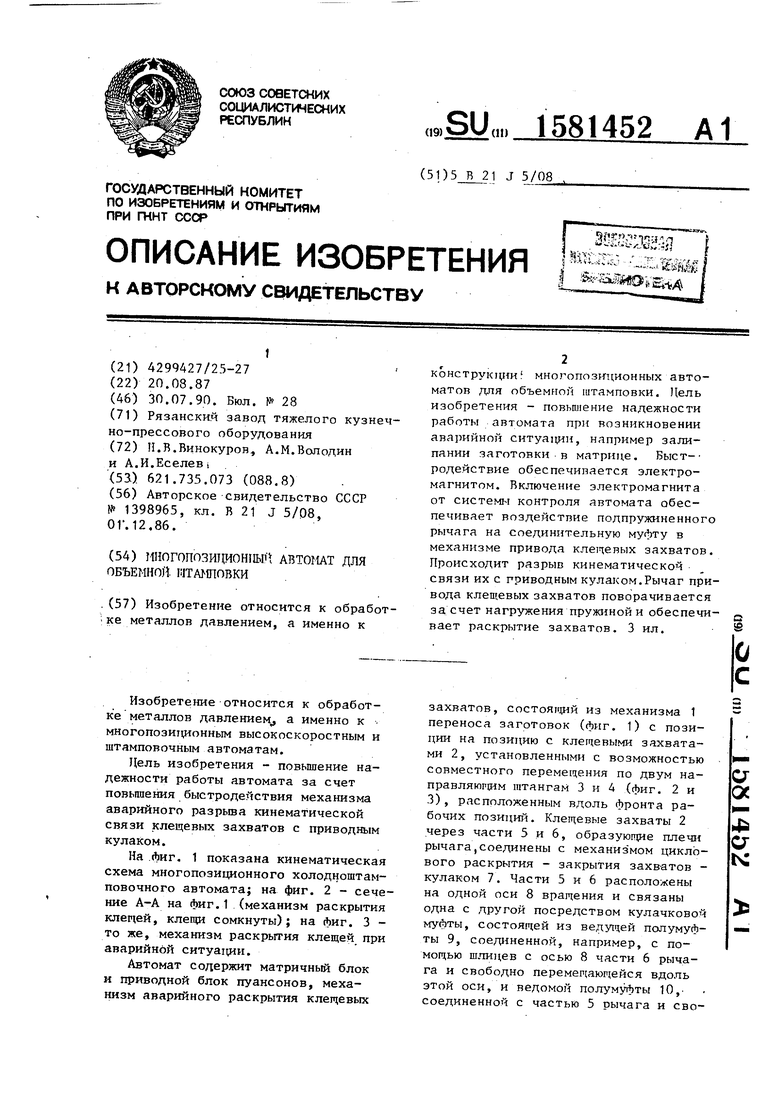
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ МНОГОПОЗИЦИОННЫЙ ДЛЯ ОБЪЕМНОЙ ШТАМПОВКИ | 1998 |
|
RU2163177C2 |
| Автомат многопозиционный для объемной штамповки | 1986 |
|
SU1398965A1 |
| Автомат для изготовления деталей стержневого типа с головками | 1976 |
|
SU659274A1 |
| Устройство переноса заготовок к многопозиционным штамповочным автоматам | 1988 |
|
SU1503969A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| Механизм переноса многопозиционного высадочного автомата | 1986 |
|
SU1442321A1 |
| Устройство для переноса заготовок | 1988 |
|
SU1556929A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Устройство для удаления немерных заготовок к штамповочному автомату | 1986 |
|
SU1324738A1 |
| Автомат для высадки | 1972 |
|
SU471944A1 |
Изобретение относится к обработке металлов давлением, а именно к конструкции многопозиционных автоматов для объемной штамповки. Цель изобретения - повышение надежности работы автомата при возникновении аварийной ситуации, например залипании заготовки в матрице. Быстродействие обеспечивается электромагнитом. Включение электромагнита от системы контроля автомата обеспечивает воздействие подпружиненного рычага на соединительную муфту в механизме привода клещевых захватов. Происходит разрыв кинематической связи их с приводным кулаком. Рычаг привода клещевых захватов поворачивается за счет нагружения пружиной и обеспечивает раскрытие захватов. 3 ил.
Фиг 1
2 3
ери г. 2
Фиг.З
| Автомат многопозиционный для объемной штамповки | 1986 |
|
SU1398965A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
