г-f-1
II / 77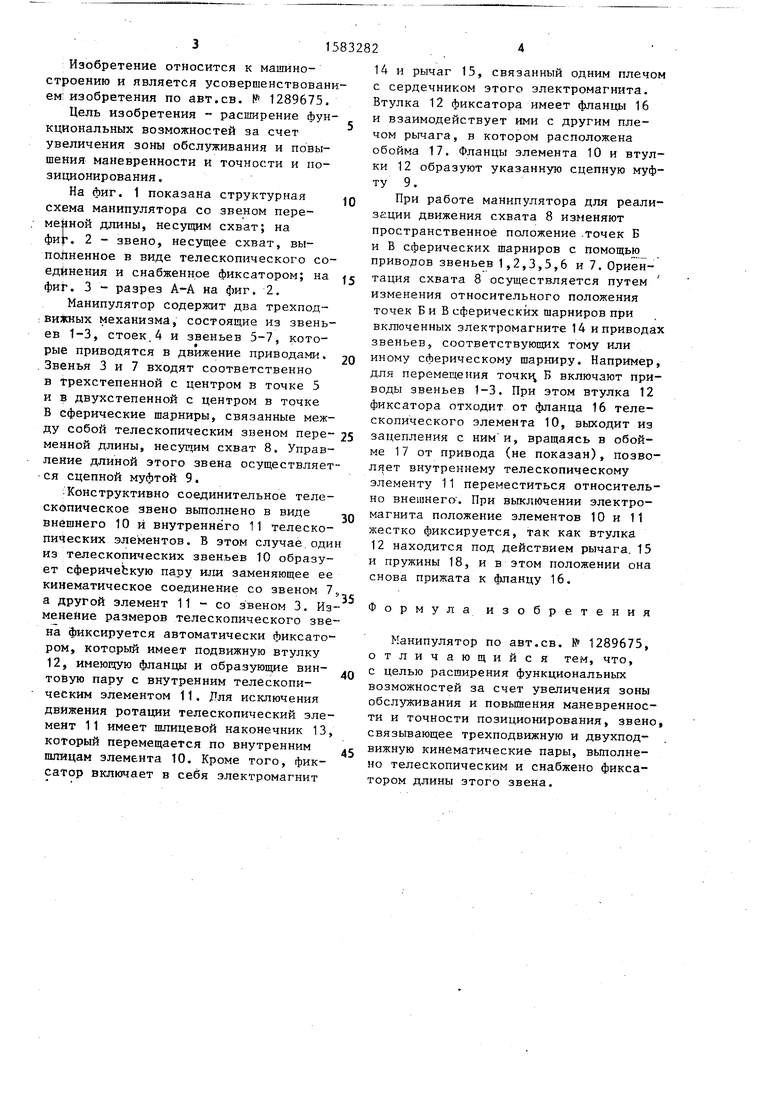
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1978 |
|
SU703323A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| Шарнир манипулятора | 1989 |
|
SU1734995A1 |
| Схват манипулятора | 1979 |
|
SU927486A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
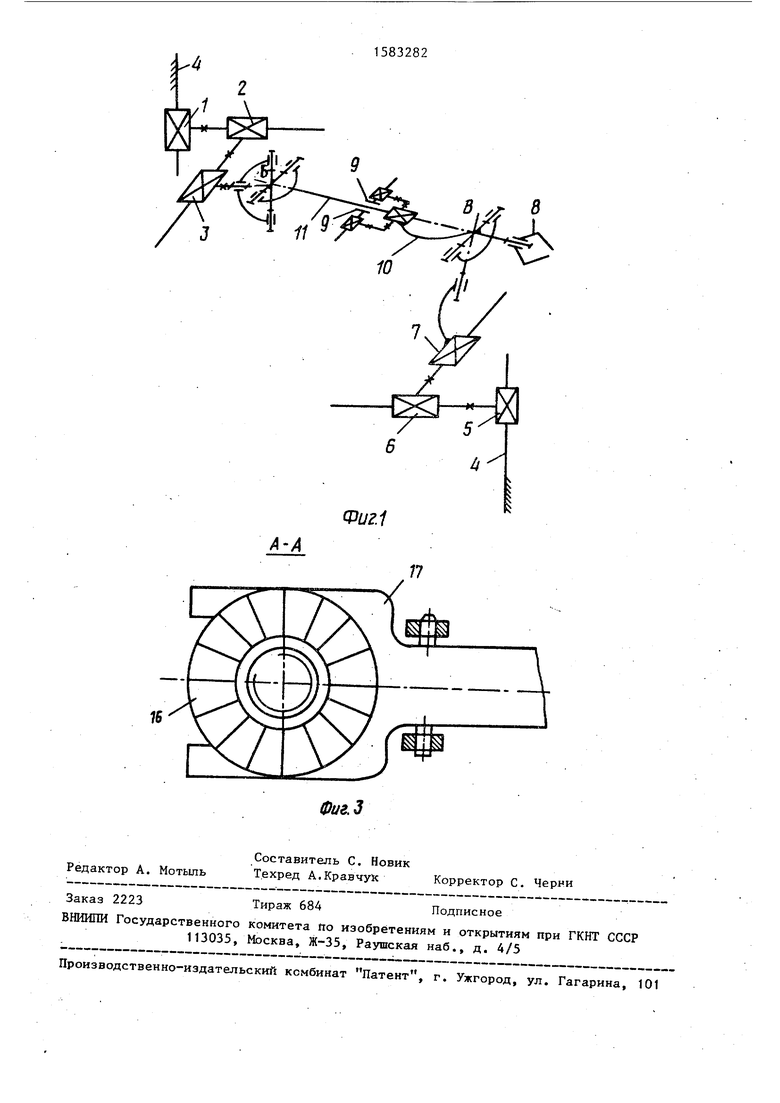
Изобретение относится к машиностроению. Цель изобретения - расширение функциональных возможностей за счет увеличения зоны обслуживания и повышение маневренности и точности позиционирования. При включении электромагнита 14 фиксатора его рычаг 15 выводит втулку 12 из зацепления с наружным телескопическим элементом 10 соединительного звена. Втулка 12, вращаясь, обеспечивает перемещение элементу 11. После отключения электромагнита втулка 12 и элемент 10 вновь входят в зацепление своими фланцами 16 под воздействием пружины 18 и рычага 15 фиксатора. 3 ил.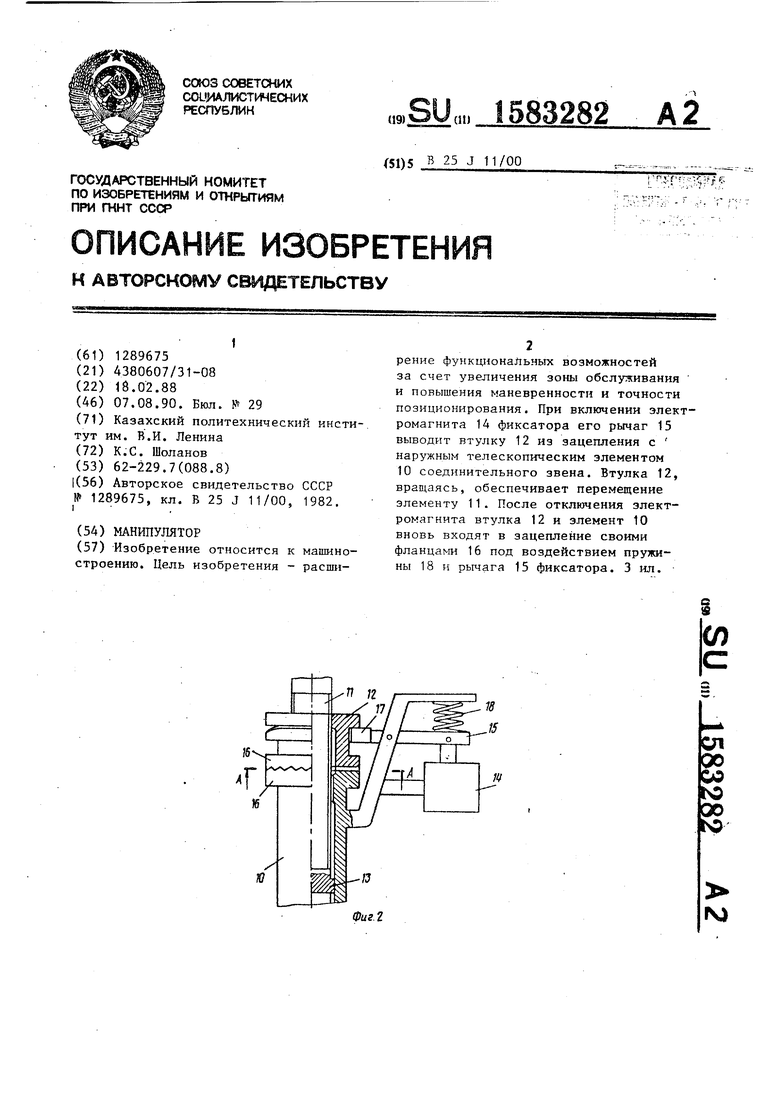
гч
Изобретение относится к машиностроению и является усовершенствованием изобретения по авт.св. f 1289675.
Цель изобретения - расширение функциональных возможностей за счет увеличения зоны обслуживания и повышения маневренности и точности и позиционирования ,
На фиг. 1 показана структурная схема манипулятора со эвеном переменной длины, несущим схват; на фиг. 2 - звено, несущее схват, выполненное в виде телескопического соединения и снабженное фиксатором; на фиг. 3 - разрез А-А на фиг. 2.
Манипулятор содержит два трехпод- вижных механизма, состоящие из звеньев 1-3, стоек.4 и звеньев 5-7, которые приводятся в движение приводами. Звенья 3 и 7 входят соответственно в трехстепенной с центром в точке 5 и в двухстепенной с центром в точке В сферические шарниры, связанные между собой телескопическим звеном пере- менной длины, несущим схват 8, Управление длиной этого звена осуществляется сцепной муфтой 9.
Конструктивно соединительное телескопическое звено выполнено в виде внешнего 10 и внутреннего 11 телескопических элементов. В этом случае оди из телескопических звеньев 10 образует сферическую пару или заменяющее ее кинематическое соединение со звеном 7 а другой элемент 11 - со звеном 3. Из менение размеров телескопического звена фиксируется автоматически фиксатором, который имеет подвижную втулку 12, имеющую фланцы и образующие винтовую пару с внутренним телескопическим элементом 11. Для исключения движения ротации телескопический элемент 11 имеет шлицевой наконечник 13, который перемещается по внутренним шлицам элемента 10. Кроме того, фиксатор включает в себя электромагнит
Q 5
0 .с
5
0
14 и рычаг 15, связанный одним плечом с сердечником этого электромагнита. Втулка 12 фиксатора имеет фланцы 16 и взаимодействует ими с другим плечом рычага, в котором расположена обойма 17. Фланцы элемента 10 и втулки 12 образуют указанную сцепную муфту 9.
При работе манипулятора для реализации движения схвата 8 изменяют пространственное положение точек Б и В сферических шарниров с помощью приводов звеньев 1,2,3,5,6 и 7. Ориентация схвата 8 осуществляется путем изменения относительного положения точек Б и В сферических шарниров при включенных электромагните 14 и приводах звеньев, соответствующих тому или иному сЛерическому шарниру. Например, для перемещения точки, Б включают приводы звеньев 1-3. При этом втулка 12 фиксатора отходит от фланца 16 телескопического элемента 10, выходит из зацепления с ним и, вращаясь в обойме 17 от привода (не показан), позволяет внутреннему телескопическому элементу 11 переместиться относительно внешнего. При выключении электромагнита положение элементов 10 и 11 жестко фиксируется, так как втулка 12 находится под действием рычага 15 и пружины 18, ив этом положении она снова прижата к фланцу 16,
Формула изобретения
Манипулятор по авт.св. № 1289675, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения зоны обслуживания и повышения маневренности и точности позиционирования, звено, связывающее трехподвижную и двухпод- вижную кинематические пары, выполнено телескопическим и снабжено фиксатором длины этого звена.
