Изобретение относится к конвейерному оборудованию, а именно к устрой ствам шагового перемещения для межоперационного транспортирования изделия, и может найти применение в автоматических линиях.
Цель изобретения - расширение технологических возможностей устройст- ва путем одновременного обслуживания находящихся на разных уровнях рабочих позиций и снижение металлоемкости.
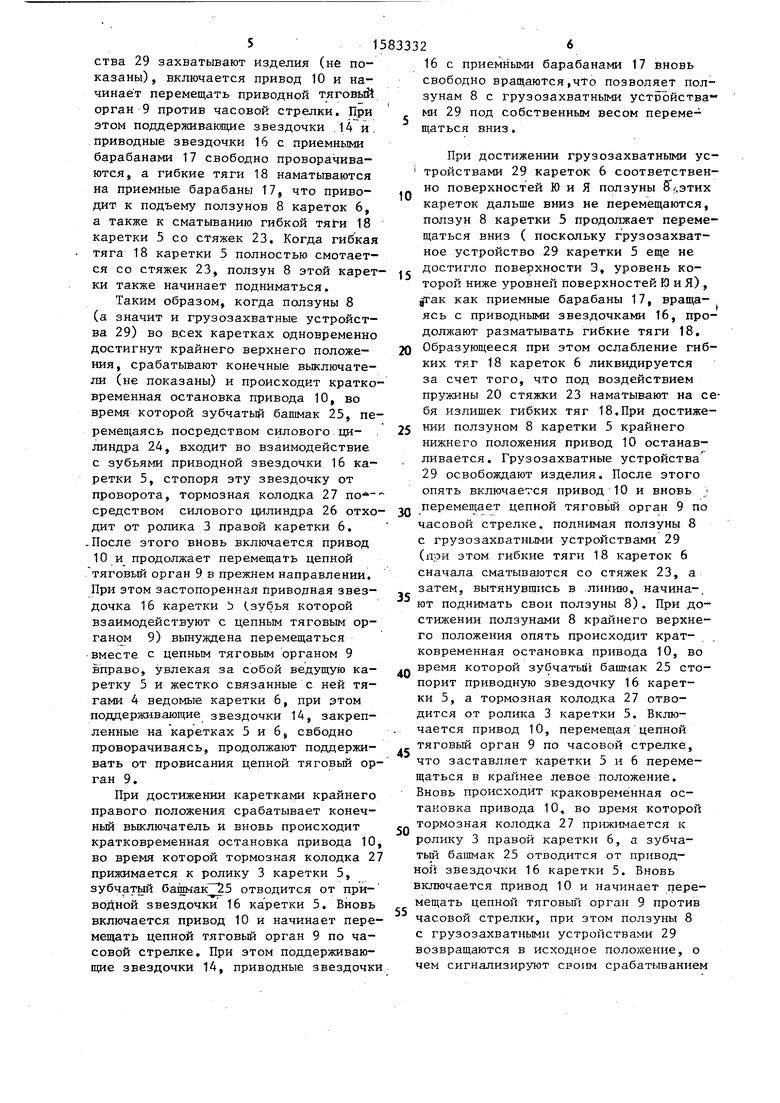
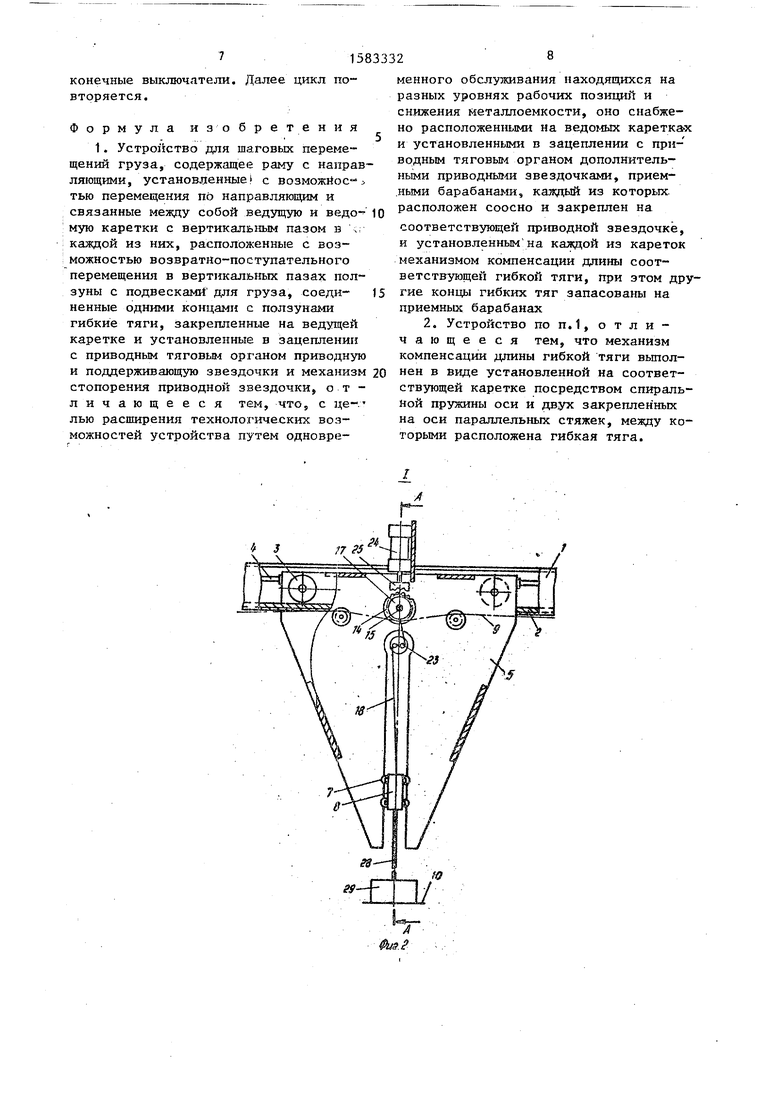
На фиг„1 изображено устройство для паговых перемещений груза общий вид; на фиг.2 - узел I на фиг,1; на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З при полном опускании ползуна; на фиг.З - то жеэ при неполном опускании ползуна.
Устройство для шаговых перемещений груза содержит раму 1 с направляющими 2, по которым на роликах 3 перемещаются жестко связанные между собой посредством тяг 4 ведущая 5 и ведомые 6 каретки с вертикальным пазом в каждой из них. С возможностью возвратно-поступательного перемещения в вертикальных пазах на роликах 7 установлены ползуны 8. Приводной тяговый орган 9 в виде цепи приводится в движение посредством привода 10. В зацеплении с приводным тяговым органом установлены натяжная 1I, поддерживающие 12 и приводная 13 звездочки. На каретке 5 закреплена основная приводная звездочка 14, установленная в зацеплении с приводным тяговым органом 9. На каретках 5 и 6 установлен механизм подъема ползуна 8, содержащий свободно вращающиеся на осях 15 и находящиеся в зацеплении с тяговым органом 9 на каретке 5 основную звездочку 14, а на каретке 6 дополнительные приводные звездочки 16, приемные барабаны 17, каждый из которых расположен соосно и закреплен на соответствующей приводной звездочке 16, и выполненные в виде отрезка троса гибкие тяги 18 соединенные одними концами с ползунами 8, а другими эапасованы на приемных барабанах 17.
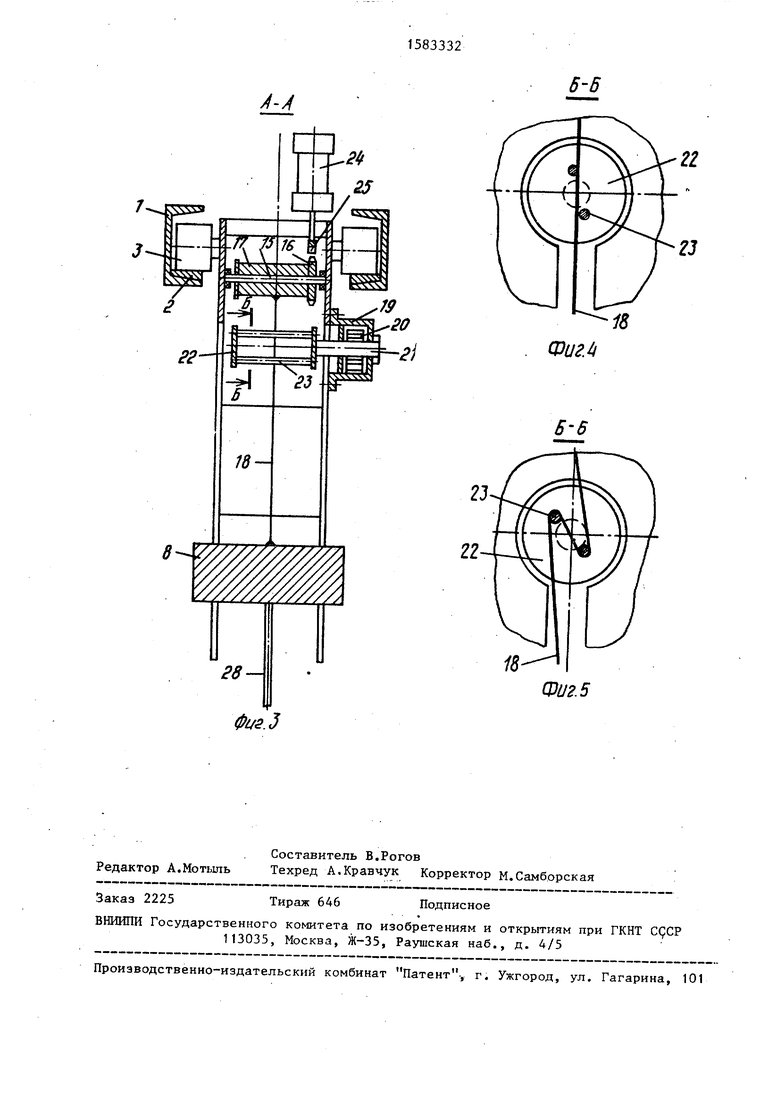
В верхней части вертикальных пазов кареток 5 и 6 смонтирован механизм компенсации длины гибкой тяги 18, который содержит неподвижно закрепленный Аа одной из боковых стенок кареток 5 и 6 корпус 19, в котором находится подпружиненная посредством спиралькой пружины 20 с возможностью возвратно-вращательного движения поворотная часть, состоящая кз оси 21 и двух дисков 22, которые соединены между собой стяжками 23. Гибкая тяга 18 пропущена
Q между стяжками 23„
Ведущая каретка 5 содержит также механизм стопорения от проворота приводной звездочки 16, который выполнен в виде силового цилиндра 24, на штоке
5 которого установлен с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями приводной звездочки 16 зубчатый башмак 25,
0 На раме 1 установлен механизм фиксации кареток 5 и 6 в крайних положениях, который содержит силовой цилиндр 26, на штоке которого закреплена тормозная колодка 27 с возмож5 ностыо взаимодействия с роликами 3. К нижнему г концу ползунов 8 на жест- -- ких тягах 28 прикреплены грузозахват ные устройства 29. Усилие, развиваемое спиральной пружиной 20, меньше
0 Суммарного веса ползуна 8, тяги 28 и грузозахватного устройства 29. Устройство обслуживает рабочие места, на которых. грузы находятся на разных уровнях. Напримерt поверхности
5 Щ и Э, находясь на одном уровне, ниже уровня поверхностей Ю и Я
Устройство работает следующим образом.
В исходном положении каретки 5 и
0 6 находятся в крайнем левом положении. При этом тормозная колодка 27 Прижата к ролику 3 правой каретки 6, зубчатый башмак 25 отведен от приводной звездочки 16 каретки 5, ползуны 8 кареток 6 находятся в крайнем нижнем положении (при этом их грузозахватные устройства 29 находятся у поверхностей соответственно Щ и 3S a гибкие тяги 18 разметаны на вею длину и занимают вертикальное положение), а ползуй 8 каретки 5 опущен не пол- ностыов так как его грузозахватное устройство 29 находится у поверхнос- та Ю (при этом образовавшийся излишек гибкой тяги ки 23 механизма гибкой тяги).
По команде с пульта управления (не показан) грузозахватные устрой18 намотан на стяж- компенсации длины
ства 29 захватывают изделия (не показаны), включается привод 10 и начинает перемещать приводной тяговый орган 9 против часовой стрелки. При этом поддерживающие звездочки 14 и приводные звездочки 16 с приемными барабанами 17 свободно проворачиваются, а гибкие тяги 18 наматываются на приемные барабаны 17, что приводит к подъему ползунов 8 кареток 6, а также к сматыванию гибкой тяги 18 каретки 5 со стяжек 23. Когда гибкая тяга 18 каретки 5 полностью смотается со стяжек 23, ползун 8 этой каретки также начинает подниматься.
Таким образом, когда ползуны 8 (а значит и грузозахватные устройства 29) во всех каретках одновременно достигнут крайнего верхнего положения, срабатывают конечные выключатели (не показаны) и происходит кратковременная остановка привода 10, во время которой зубчатый башмак 25, перемещаясь посредством силового цилиндра 24, входит во взаимодействие с зубьями приводной звездочки 16 каретки 5, стопоря эту звездочку от проворота, тормозная колодка 27 по средством силового цилиндра 26 отходит от ролика 3 правой каретки 6.
.После этого вновь включается привод 10 и продолжает перемещать цепной
тяговый орган 9 в прежнем направлении. При этом застопоренная приводная звездочка 16 каретки Ь (.зубья которой взаимодействуют с цепным тяговым органом 9) вынуждена перемещаться вместе с цепным тяговым органом 9 вправо, увлекая за собой ведущую каретку 5 и жестко связанные с ней тягами 4 ведомые каретки 6, при этом поддерживающие звездочки 14, закрепленные на каретках 5 и б, свбодно проворачиваясь, продолжают поддерживать от провисания цепной тяговый орган 9.
При достижении каретками крайнего правого положения срабатывает конечный выключатель и вновь происходит кратковременная остановка привода 10, во время которой тормозная колодка 27 прижимается к ролику 3 каретки 5, зубчатый башмак 25 отводится от при- водной звездочки 16 каретки 5. Вновь включается привод 10 и начинает перемещать цепной тяговый орган 9 по часовой стрелке. При этом поддерживающие звездочки 14, приводные звездочки
0
5
0
5
0
5
0
5
0
5
16 с приемными барабанами 17 вновь свободно вращаются,что позволяет ползунам 8 с грузозахватными устройства - ми 29 под собственным весом перемещаться вниз.
При достижении грузозахватными ус- 1 тройствами 29 кареток 6 соответственно поверхностей Ю и Я ползуны ,этих кареток дальше вниз не перемещаются, ползун 8 каретки 5 продолжает перемещаться вниз ( поскольку грузозахватное устройство 29 каретки 5 еще не достигло поверхности Э уровень которой ниже уровней поверхностей Ю и Я) , jfraK как приемные барабаны 17, вращаясь с приводными звездочками 16, продолжают разматывать гибкие тяги 18. Образующееся при этом ослабление гибких ткг 18 кареток 6 ликвидируется за счет того, что под воздействием пружины 20 стяжки 23 наматывают на себя излишек гибких тяг 18.При достижении ползуном 8 каретки 5 крайнего нижнего положения привод 10 останавливается. Грузозахватные устройства 29 освобождают изделия. После этого опять включается привод 10 и вновь перемещает цепной тяговый орган 9 по часовой стрелке, поднимая ползуны 8 с грузозахватными устройствами 29 (пои этом гибкие тяги 18 кареток 6 сначала сматываются со стяжек 23, а затем, вытянувшись в линию, начина-, ют поднимать свои ползуны 8). При достижении ползунами 8 крайнего верхнего положения опять происходит кратковременная остановка привода 10, во время которой зубчатый башмак 25 стопорит приводную звездочку 16 каретки 5, а тормозная колодка 27 отводится от ролика 3 каретки 5. Включается привод 10, перемещая цепной тяговый орган 9 по часовой стрелке, что заставляет каретки 5 и 6 перемещаться в крайнее левое положение. Вновь происходит краковременная остановка привода 10, во время которой тормозная колодка 27 прижимается к ролику 3 правой каретки 6, а зубчатый башмак 25 отводится от приводной звездочки 16 каретки 5. Вновь включается привод 10 и начинает перемещать цепной тяговый орган 9 против часовой стрелки, при этом ползуны 8 с грузозахватными устройствами 29 возвращаются в исходное положение, о чем сигнализируют своим срабатыванием
конечные выключатели. Далее цикл повторяется.
Формула изобретения
1. Устройство для шаговых перемещений груза, содержащее раму с направляющими, установленные с возможное- , тью перемещения по направляющим и связанные между собой ведущую и ведо- мую каретки с вертикальным пазом в . каждой из них, расположенные с возможностью возвратно-поступательного перемещения в вертикальных пазах ползуны с подвесками для груза, соеди- ненные одними концами с ползунами гибкие тяги, закрепленные на ведущей каретке и установленные в зацеплении с приводным тяговым органом приводную и поддерживающую звездочки и механизм стопорения приводной личающееся лью расширения технологических возможностей устройства путем одноврезвездочки, о т - тем, что, с це-
менного обслуживания находящихся на разных уровнях рабочих позиций и снижения металлоемкости, оно снабжено расположенными на ведомых каретках и установленными в зацеплении с приводным тяговым органом дополнительными приводными звездочками, приемными барабанами, каждый из которых расположен соосно и закреплен на
соответствующей приводной звездочке, и установленным на каждой из кареток механизмом компенсации длины соответствующей гибкой тяги, при этом другие концы гибких тяг запасованы на приемных барабанах
2. Устройство по п.отличающееся тем, что механизм компенсации длины гибкой тяги выполнен в виде установленной на соответствующей каретке посредством спиральной пружины оси и двух закрепленных на оси параллельных стяжек, между которыми расположена гибкая тяга.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых перемещений груза | 1987 |
|
SU1509311A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| Устройство для управления приводом вертикального перемещения кареток грузоподъемной машины | 1981 |
|
SU1009927A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для синхронной заливки форм на литейных конвейерах | 1982 |
|
SU1071362A1 |
| Устройство для транспортирования изделий | 1979 |
|
SU882887A1 |
| Грузозахватная траверса | 1984 |
|
SU1180344A1 |
| Напольный тележечный конвейер | 1982 |
|
SU1022884A1 |
Изобретение относится к конвейерному оборудованию. Цель - расширение технологических возможностей путем одновременного обслуживания рабочих позиций, находящихся на разных уровнях, увеличение высоты подъема груза без увеличения длины кареток, снижение металлоемкости. На раме 1 с возможностью перемещения по направляющим 2 установлены ведущая 5 и ведомые 6 каретки (К). Каждая К снабжена вертикальным пазом. В пазах с возможностью перемещения расположены ползуны (П) 8 с подвесками для груза. На ведущей и ведомых К закреплены приводная 13 и поддерживающая 14 звездочки. На К 5 и 6 установлены дополнительные звездочки в зацеплении с тяговым органом 9, приемные барабаны 17, расположенные соосно и закрепленные на звездочках 16. На К 5 и 6 установлены механизмы компенсации длины гибких тяг 18 в виде спиральной пружины, оси с двумя стяжками. На К 5 и 6 размещен механизм стопорения звездочки 13. При движении тягового органа 9 вращаются барабаны 17 и груз поднимается. При стопорении звездочки 16 начинают поступательное перемещение К 5 и 6. При опускании груза на разные уровни разматываются тяги 18, натяжение которых компенсируется механизмом компенсации длины тяг 18. 1 з.п. ф-лы, 5 ил.
ё$
А-А
Редактор А.Мотыль
Составитель В.Рогов
Техред А.Кравчук Корректор М.Самборская
Заказ 2225
Тираж 646
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ CCJCP 113035, Москва, Ж-35, Раушская наб., д. 4/5
ФигМ
6-6
Фиг. 5
Подписное
| Устройство для шаговых перемещений груза | 1987 |
|
SU1509311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
