СП
Од
Изобретение относится к конвейерному транспорту.
Цель изобретения - повьшение надежности работы устройства.
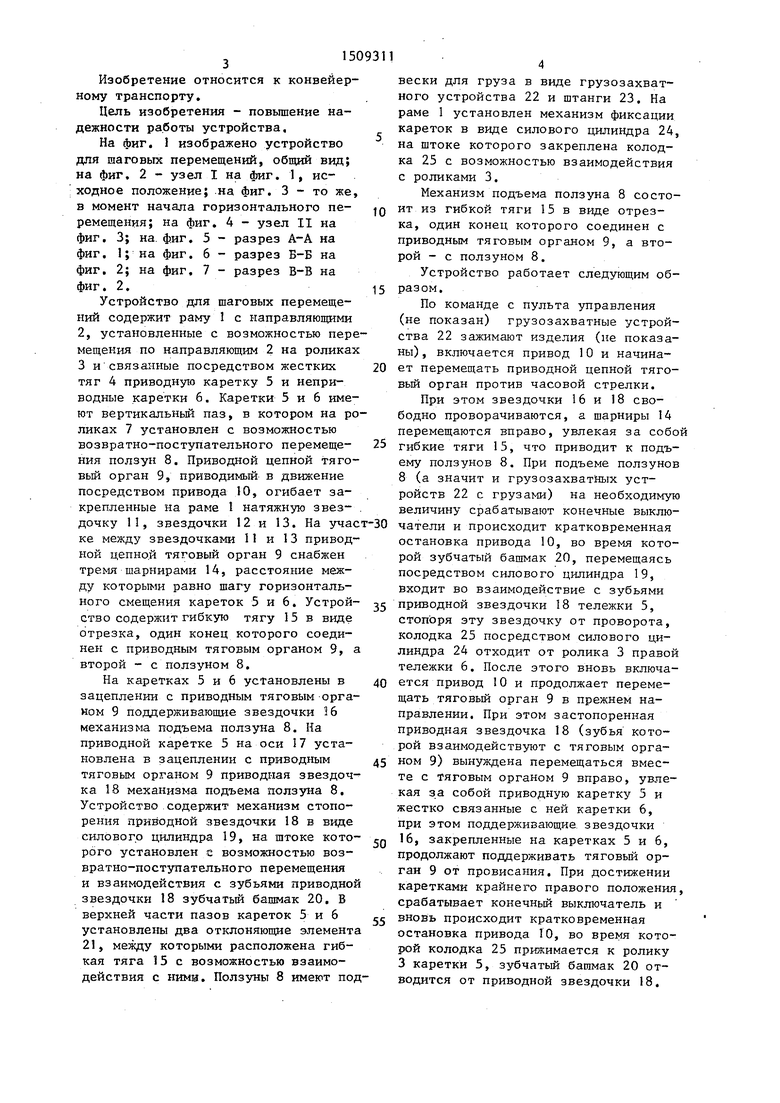
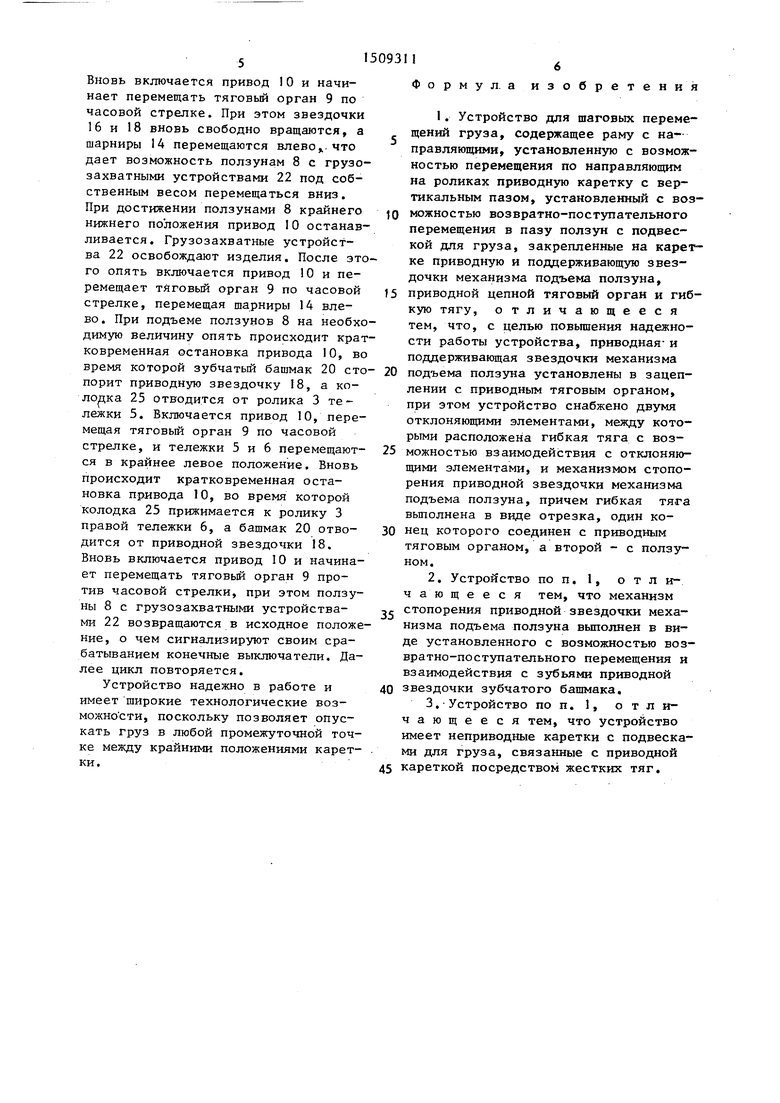
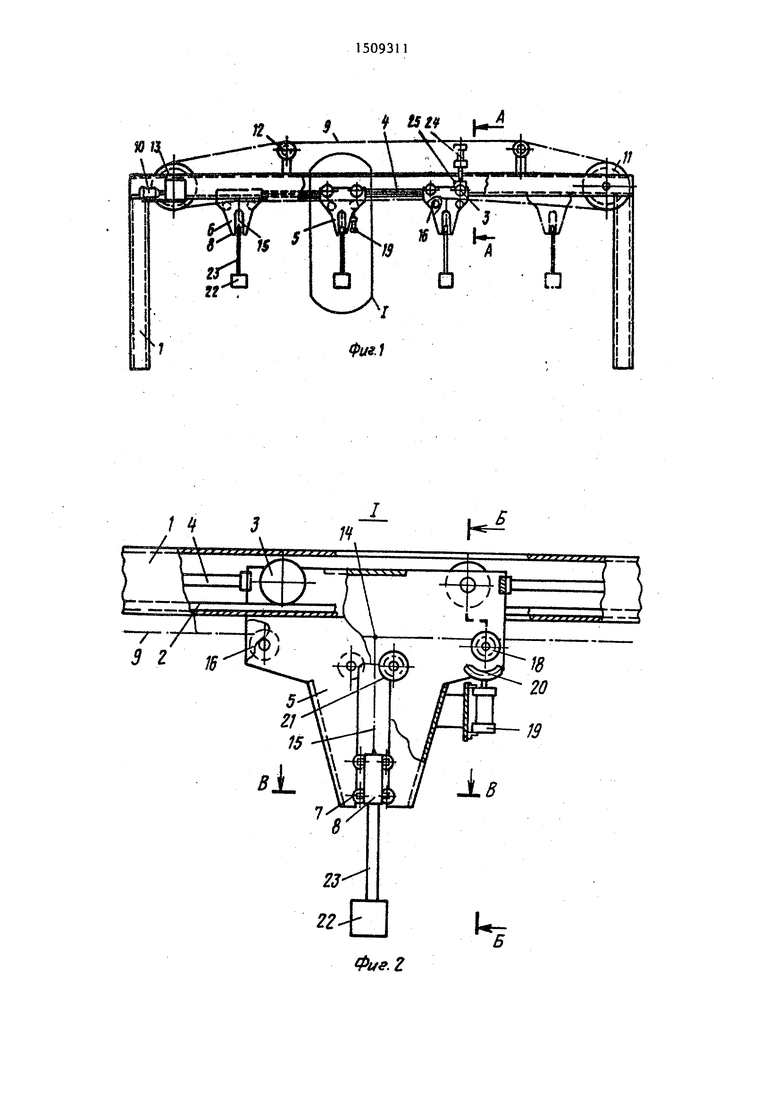
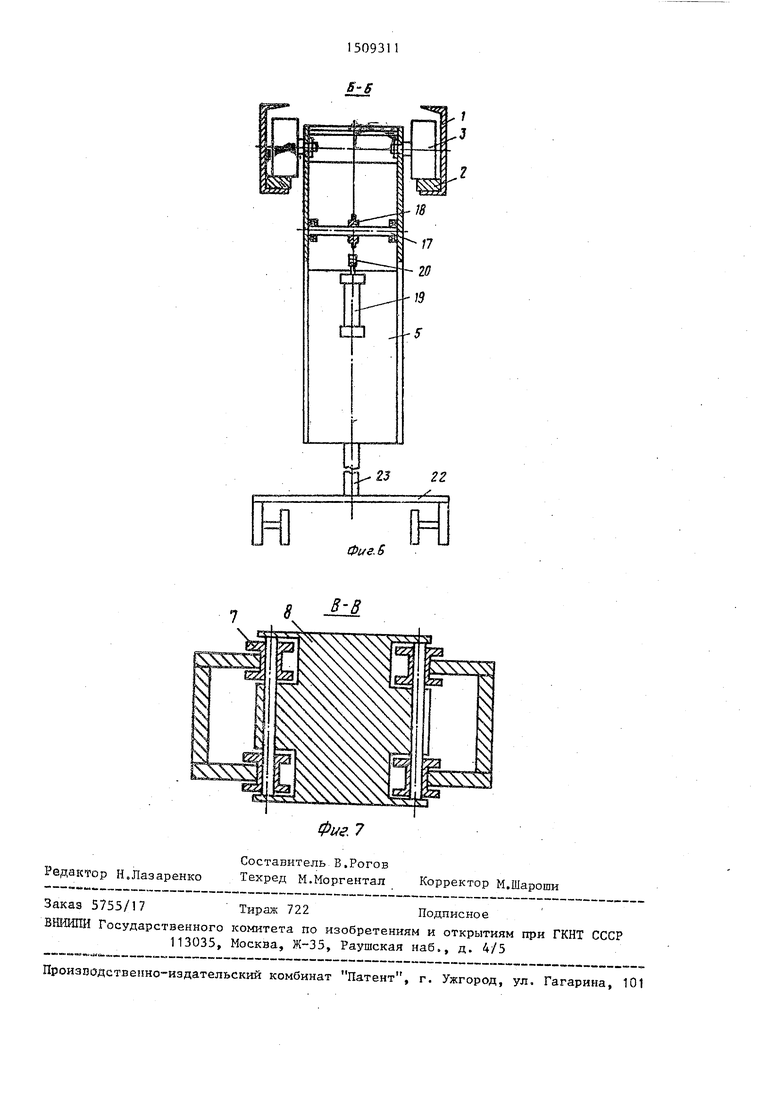
На фиг. 1 изображено устройство для шаговых перемещений, общий вид; на фиг. 2 - узел I на фиг. 1, исходное положение; .на фиг. 3 - то же, в момент начала горизонтального пе- ремещения; на фиг. 4 - узел II на фиг. 3; на. фиг. 5 - разрез А-А на фиг. 1; на фиг. 6 - разрез Б-Б на фиг. 2; на фиг. 7 - разрез В-В на фиг. 2.
Устройство для шаговых перемещений содержит раму 1 с направляющими 2, установленные с возможностью перемещения по направляющим 2 на роликах 3 и связанные посредством жестких тяг 4 приводную каретку 5 и неприводные каретки 6. Каретки 5 и 6 имеют вертикальньй паз, в котором на роликах 7 установлен с возможностью возвратно-поступательного перемеще- НИН ползун 8. Приводной цепной тяговый орган 9, приводимый в движение посредством привода 10, огибает закрепленные на раме 1 натяжную звез- дочку II, звездочки 12 и 13. На учас ке между звездочками 11 и 13 приводной цепно.й тяговый орган 9 снабжен тремя шарнирами 14, расстояние между которыми равно шагу горизонтального смещения кареток 5 и 6. Устрой- ство содержит гибкую тягу 15 в виде отрезка, один конец которого соединен с приводным тяговым органом 9, а второй - с ползуном 8.
На каретках 5 и 6 установлены в зацеплении с приводным тяговым органом 9 поддерживающие звездочки 56 механизма подъема ползуна 8. На приводной каретке 5 на оси 17 установлена в зацеплении с приводным тяговым органом 9 приводная звездочка 18 механизма подъема ползуна 8. Устройство содержит механизм стопо- рения приводной звездочки 18 в виде силового цилиндра 19, на штоке кото- рого установлен с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями приводной звездочки 18 зубчатый башмак 20. В верхней части пазов кареток 5 и 6 установлены два отклоняюш 1е элемент 21, между которыми расположена гибкая тяга 15 с возможностью взаимодействия с ними. Ползуны 8 имеют повески для груза в виде грузозахватного устройства 22 и штанги 23. На раме 1 установлен механизм фиксации кареток в виде силового цилиндра 24, на штоке которого закреплена колодка 25 с возможностью взаимодействия с роликами 3.
Механизм подъема ползуна 8 состоит из гибкой тяги 15 в виде отрезка, один конец которого соединен с приводным тяговым органом 9, а второй - с ползуном 8.
Устройство работает следующим образом.
По команде с пульта з равления (не показан) грузозахватные устройства 22 зажимают изделия (не показаны), включается привод 10 и начинает перемещать приводной цепной тяго- вьш орган против часовой стрелки.
При этом звездочки 16 и 18 свободно проворачиваются, а шарниры 14 перемещаются вправо, увлекая за собо гибкие тяги 15, что приводит к подъему ползунов 8. При подъеме ползунов 8 (а значит и грузозахватных устройств 22 с грузами) на необходимую величину срабатывают конечные выключатели и происходит кратковременная остановка привода 10, во время которой зубчатый башмак 20, перемещаясь посредством силового цилиндра 19, входит во взаимодействие с зубьями приводной звездочки 18 тележки 5, стопоря эту звездочку от проворота, колодка 25 посредством силового цилиндра 24 отходит от ролика 3 правой тележки 6. После этого вновь включается привод 10 и продолжает перемещать тяговый орган 9 в прежнем направлении. При этом застопоренная приводная звездочка 18 (зубья которой взаимодействуют с тяговым органом 9) вынуждена перемещаться вместе с Тяговым органом 9 вправо, увлекая за собой приводную каретку 5 и жестко связанные с ней каретки 6, при этом поддерживающие звездочки 16, закрепленные на каретках 5 и 6, продолжают поддерживать тяговый орган 9 от провисания. При достижении каретками крайнего правого положения срабатывает конечный выключатель и вновь происходит кратковременная остановка привода 10, во время которой колодка 25 прижимается к ролику 3 каретки 5, зубчатьй башмак 20 отводится от приводной звездочки 18.
Вновь включается привод IО и начинает перемещать тяговый орган 9 по часовой стрелке. При этом звездочки 16 и 18 вновь свободно вращаются, а шарниры 14 перемещаются влево. что дает возможность ползунам 8 с грузозахватными устройствами 22 под собственным весом перемещаться вниз. При достижении ползунами 8 крайнего нижнего положения привод 10 останавливается. Грузозахватные устройства 22 освобождают изделия. После этого опять включается привод 10 и перемещает тяговый орган 9 по часовой стрелке, перемещая щарниры 14 влево . При подъеме ползунов 8 на необходимую величину опять происходит кратковременная остановка привода 10, во время которой зубчатьш башмак 20 стопорит приводную звездочку 18, а колодка 25 отводится от ролика 3 те- лежки 5. Включается привод 10, перемещая тяговый орган 9 по часовой стрелке, и тележки 5 и 6 перемещаются в крайнее левое положение. Вновь происходит кратковременная остановка привода 10, во время которой колодка 25 прижимается к ролику 3 правой тележки 6, а бащмак 20 отводится от приводной звездочки 18. Вновь включается привод 10 и начинает перемещать тяговьй орган 9 против часовой стрелки, при этом ползуны 8 с грузозахватными устройствами 22 возвращаются в исходное положение, о чем сигнализируют своим срабатыванием конечные выключатели. Далее цикл повторяется.
Устройство надежно в работе и имеет широкие технологические воз- можно сти, поскольку позволяет опускать груз в любой промежуточной точке между крайними положениями карет- ки.
Формул, а изобретения
1. Устройство для шаговых перемещений груза, содержащее раму с направляющими, установленную с возможностью перемещения по направляющим на роликах приводную каретку с вертикальным пазом, установленный с возможностью возвратно-поступательного перемещения в пазу ползун с подвеской для груза, закрепленные на каретке приводную и поддерживающую звездочки механизма подъема ползуна,
приводной цепной тяговый орган и гибкую тягу, о тличающееся тем, что, с целью повьшения надежности работы устройства, приводная- и поддерживающая звездочки механизма
подъема ползуна установлены в зацеплении с приводным тяговым органом, при этом устройство снабжено двумя отклоняющими элементами, между которыми расположена гибкая тяга с возможностью взаимодействия с отклоняющими элементами, и механизмом стопо- рения приводной звездочки механизма подъема ползуна, причем гибкая тяга вьшолнена в виде отрезка, один конец которого соединен с приводным тяговым органом, а второй - с ползуном.
2.Устройство по п, 1, о т л и- чающееся тем, что механизм
стопорения приводной звездочки механизма подъема ползуна выполнен в виде установленного с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями приводной
звездочки зубчатого башмака.
3.Устройство по п. 1, отличающееся тем, что устройство имеет неприводные каретки с подвесками для груза, связанные с приводной
кареткой посредством жестких тяг.
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых перемещений груза | 1988 |
|
SU1583332A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU373235A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2141446C1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| Устройство для перемещения груза | 1987 |
|
SU1481151A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
Изобретение относится к конвейерному транспорту. Цель изобретения - повышение надежности работы устройства. На направляющих 2 рамы 1 на роликах 3 установлена с возможностью перемещения приводная каретка (К) 5 с вертикальным пазом. В нем установлен с возможностью возвратно-поступательного перемещения ползун 8 с подвеской для груза 22. На К 5 установлены в зацеплении с приводным цепным тяговым органом 9 приводная 18 и поддерживающая 16 звездочки. Устройство снабжено двумя отклоняющими элементами 21, между которыми расположена гибкая тяга 15 с возможностью взаимодействия с отклоняющими элементами 21. Тяга 15 выполнена в виде отрезка, один конец которого соединен с тяговым органом 9, а другой - с ползуном 8. На К 5 закреплен механизм стопорения звездочки 18 в виде установленного с возможностью возвратно-поступательного перемещения и взаимодействия с зубьями звездочки 18 зубчатого башмака 20. Неприводные К с подвесками для груза 22 связаны с К 5 жесткими тягами. При перемещении тягового органа 9 вправо ползун 8 поднимается вверх. Башмак 20 стопорит звездочки 18, при этом К 5 перемещается вдоль направляющих 2. При перемещении тягового органа 9 влево изменяется направление движения К 5 и неприводных К. При расстопорении звездочки 18 ползун 8 опускается. 2 з.п. ф-лы, 7 ил.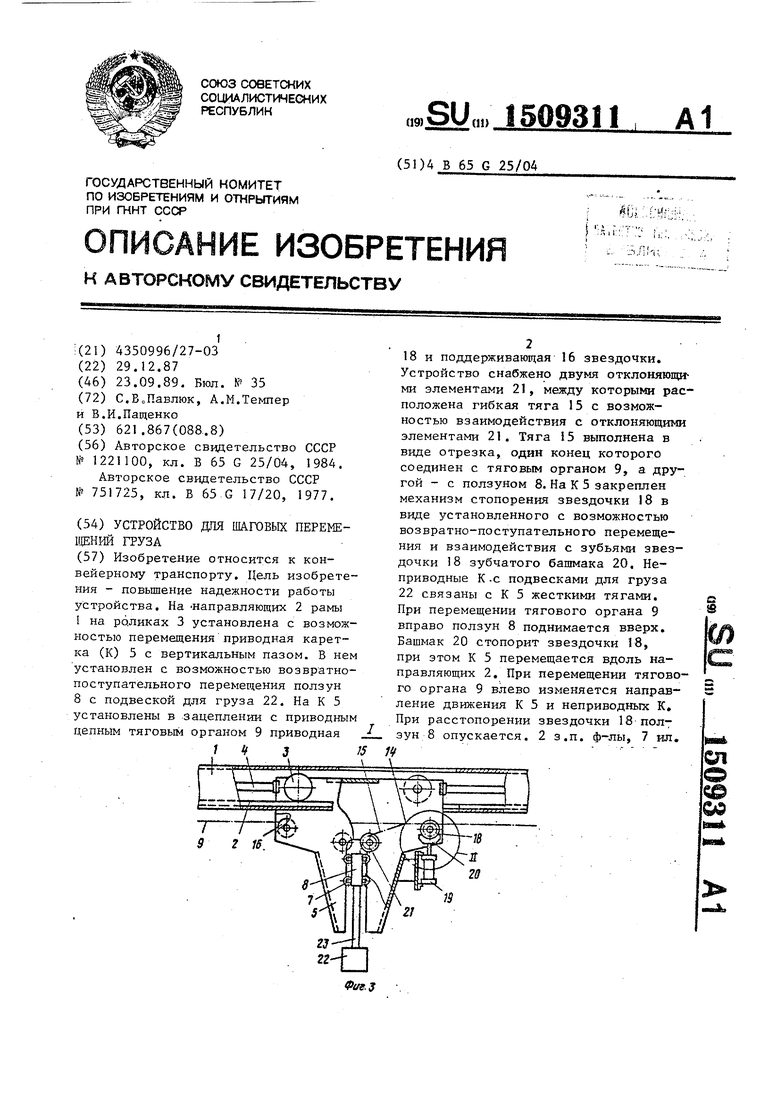
/ 3
, /iУ
/
-уь- Mif f f rffff ffffirr f t f f(
tea..rs.T: 4t xzAJJLZf. «. /r. r r, Дл
5 г да
/
И
Фиг. 2
19
| Устройство для шаговых перемещений | 1984 |
|
SU1221100A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Подвесной грузонесущий конвейер | 1977 |
|
SU751725A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
