12 8 -L
Изобретение относится к машиностроению, а именно к шарнирно-рычажным пространственным преобразователям одного вида движения в другой, и найдет применение, в частности, в дорожном, строительном и сельскохозяйственном машиностроении. Цель изобретения - расширение кинематических возможностей механизма путем создания возможности регулирования амплитуды и направления движения ведомого, звена без остановки механизма.
На чертеже показана кинематическая схема механизма.
Механизм содержит основание 1, исполнительное звено в виде двух стержней 2 и 3, связанных между собой сферическим шарниром А, причем стержень 2 через сферический шарнир В связан с основанием 1, и четырех шатунов 4-7, которые попарно через сферические шарниры C,D и E,F связаны соответственно со стержнями 2 и 3. Шарниры С и Е при этом выполнены с пальцами..
С основанием 1 шарнирно связаны пневмо- или гидроцилмндры 8-11, причем оси их шарниров расположены под различ- . ными углами одна к другой и в разных плоскостях, а поршни 12-15 жестко связаны соответственно с шатунами 4-7.
Механизм работает следующим образом.
От гидропривода (не показан) по заданной программе подают разнонаправленное давление в цилиндры 8-11. под
ействием которого поршни 12-15 вместе шатунами 4-7 совершают возвратно-потупательные перемещения с разными ампитудами, а цилиндры 8-11 при этом
колеблются вокруг остей шарниров, связывающих их с основанием 1. В результате центр шарнира А вместе со стержнем 2 совершает перемещение по сферической поверхности с центром в шарнире В, а точка К стержня 3
совершает сложное движение, складывающееся из перемещения шарнира А по сфере вокруг шарнира В и перемещения точки К по сфере вокруг шарнира А.
Изменяя порядок подачи давления в цилиндры 8-11, изменяют амплитуду и направление движения точки К.
Формула изобретения Шарнирно-рычажный пространственный механизм с регулируемой амплитудой, содержащий основание, исполнительное звено в виде двух связанных сферическим шарниром стержней, один из которых сферическим шарниром связан с основанием, и
четыре шатуна, одними концами через сферические шарниры связанные попарно с соответствующими стержнями, а другими концами через ведущие звенья - с основанием, отличающийся тем, что, с целью
расширения кинематических возможностей, ведущие звенья выполнены в виде пневмо- или гидроцилиндров, поршни которых жестко связаны с шатунами, а цилиндры шарнирно связаны с основанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| Многозвенный пространственный механизм | 1986 |
|
SU1312288A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Устройство для кинематического исследования шарнирного многозвенника | 1974 |
|
SU686907A1 |
| МЕХАНИЗМ ДЕФОРМАЦИИ ГИБКОГО РАБОЧЕГО ОРГАНА ВИБРАЦИОННО-ВОЛНОВОЙ МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ПИЩЕВЫХ ПРОДУКТОВ | 1992 |
|
RU2035866C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| Пространственный регулируемый шарнирно-рычажный механизм | 1987 |
|
SU1516678A1 |
Изобретение относится к шарнирно-рычажным пространственным преобразователям одного вида движения в другой и может быть применено, в частности, в дорожном, строительном и сельскохозяйственном машиностроении. Цель изобретения - расширение кинематических возможностей механизма за счет создания возможности регулирования амплитуды и направления движения ведомого звена без остановки механизма. От гидропривода по заданной программе подают разнонаправленное давление в цилиндры 8, 9, 10 и 11, под действием которого поршни 12, 13, 14 и 15 с шатунами 4, 5, 6 и 7 совершают возвратно-поступательные перемещения, а цилиндры 8, 9, 10 и 11 совершают колебания вокруг осей шарниров, связывающих их с основанием 1. В результате точка K стержня 3 совершает сложное движение, состоящее из движения шарнира A по сфере вокруг шарнира B и движения точки K по сфере вокруг шарнира A. Изменяя порядок подачи давления в цилиндры 8, 9 и 10, 11, изменяют амплитуду и направление движения точки K. 1 ил.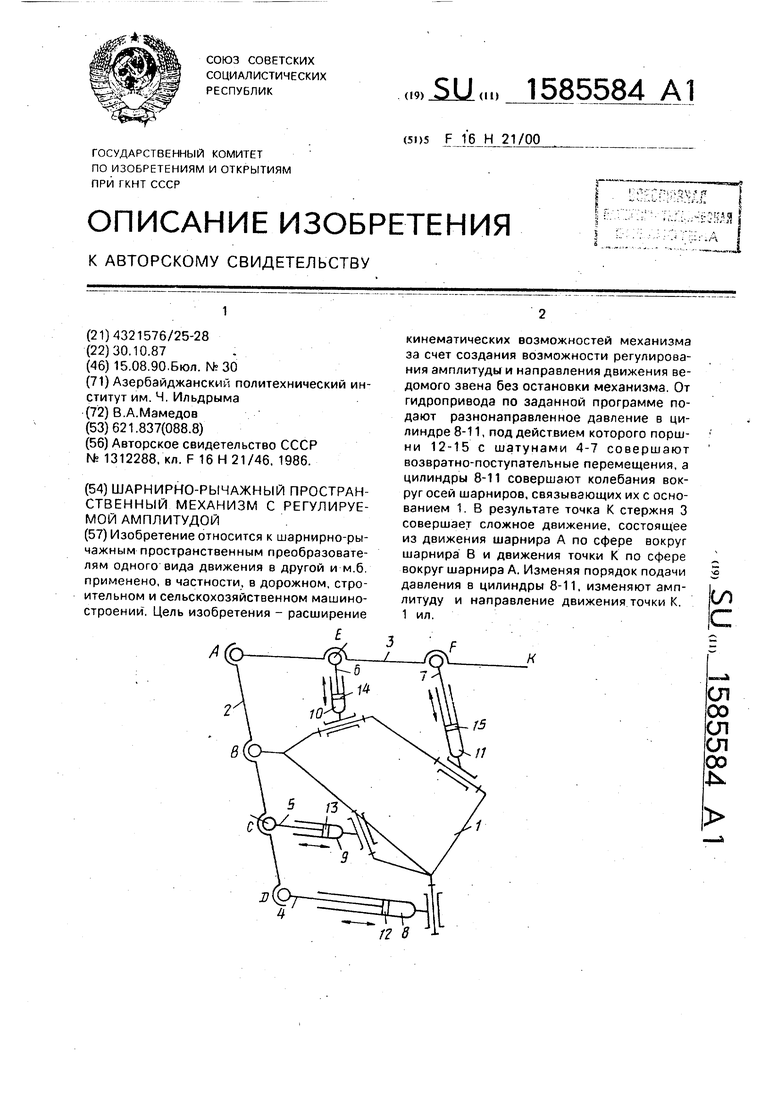
| Многозвенный пространственный механизм | 1986 |
|
SU1312288A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
