СП
с vi
4ib
а
3 15
Изобретение относится к адаптивным системам автоматического управления и может быть использовано для стабилизации фyнкIl oнaльныx соотношений фазовых переменных.
Целью изобретения является повышение точности системы в условиях параметрических возмущений объекта управления и расширение области применения системы. .
На фиг.1 представлена схема системы адаптивного управления на фиг.2 - пример реализации системы адаптивного управления.Система (фиг.1) содержит объект 1 управления, блок 2 определения функционального соотношения фазовьк пере- менньк, блок 3 задания функционального соотношения, первьй сумматор 4, блок 5 формирования коэффициента обратной связи, умножитель 6, второй сумматор 7, третий сумматор 8, вычислитель 9 членов степенного ряда переменного смещения, блок 10 вычисления переменных коэффициентов при соответствующих членах степенного ряда, блок 11 умножителей, группу из К умножителей 12,-12.
Система (фиг,2) также содержит первьй умножитель 13, первый делитель 14, группу из К умножителей , группу из К делителей 16 ,-16), группу из К масштабных усилителей 7 -М, группу из К интеграторов 18,-18(, второй умножитель 19, усилитель 20, усилитель 21 мощности, двигатель 22, тахогенератор 23, датчик 24 тока, второй делитель 25, источник 26 напряжения.
Система адаптивного управления работает следующим образом.
Сигнал управления, поступающий на вход объекта 1 управления, формируется в виде
U k( (t) ,
Т . « J
фазовые переменные объекта управления;
сигнал ошибки стабилизации функционального соотношения ;
переменный коэффициент обратной связи;
переменное смещение; переменные (настраиваемые) коэффициенты при
Q
,. 5
Q
5
5
0
5
PI X X
S(x,xp
Sfl ,-Д i
соответствующих членах степенного ряда; члены степенного ряда от фазовых переменных; текущее значение функционального соотношения; заданное значение функционального соотношения; показатели степени. Сигнал ошибки стабилизации 4 формируется на выходе второго сумматора 7, на первый вход которого из блока 3 задания поступает сигнал заданного функционального соотношения фазовых переменных S и сравнивается с текущим значением функционального соотношения S(x), вырабатываемым блоком 2..Одновременно в блоке 5 и вычи- тателе 9 производится расчет значений переменного коэффициента обратной связи k(x,)H членов степенного ряда х, х , (,К). Полученный на выходе сумматора 7 сигнал ошибки подается на первый вход умножителя 6, на второй вход которого поступает сигнал k(x,), и на выходе умножителя 6 формируется первое слагаемое сигнала управления k(x)4.
Блок 10 вычисления переменньк коэффициентов при соответствующих членах степенного ряда вырабатывает сигналы настраиваемых коэффициентов С; (t), поступающие на первые входы блока 11 умножителей. На вторые входы данно -о блока поступают сигналы
с выходов вычислителя 9. Выh- Р
X 1 X 1
1 2 ходные сигналы блока 11 умножителей
суммируются в сумматоре 8, на выходе которого формируется второе слагаемое сигнала управления - адаптивное переменное смещение, поступающее на вход сумматора 4. На второй вход данного сумматора подается сигнал k(x)Л, и на выходе формируется управление и, обеспечивающее адаптивную стабилизацию заданного функционального соотношения .
Момент включения системы управления в работу, в общем случае, характеризуется наличием ошибки стабилизации 4(0)0 и произвольными значениями настраиваемых параметров. Начальный этап работы системы определяется, протеканием переходного процесса по ошибке стабилизации Л, которая изменяется от своего произвольного начального значения 4(0) до установившегося значения. При этом подавление оип1бки
C;(t)x/xV C,(t)x,+C,(t)xi+
ft
обеспечивается первым слагаемым управляющего воздействия - k(x,)4.
При достижении ошибки стабилизации своего установившегося значения дальнейшая ее компенсация осуществля ется за счет настройки коэффициентов при соответствующих членах степенног ряда Cj , производимой блоком 10. Уменьшение ошибки Л уменьшает скорость настройки параметров с течение времени Л и С f - О и таким образом система управления приходит в равновесное состояние..
Изобретение может быть применено для. адаптивной стабилизации мощности электродвигателя постоянного тока (фиг.2) на заданном уровне Р.
При этом
bv,x ,.)X ;
k(x,) ( ,);
..e;
+C3(t) --,
Я
t X .
где x uJ- угловая скорость вращения вала электродвигателя;х ijj - ток якоря;
постоянная двигателя по моменту;
ивдуктивность обмотки якоря;
заданное время переходного процесса.Таким образом, применение изобретения позволяет повысить точность стабилизахши заданных функциональньк соотношений и, в частности, предельного значения тока якоря электродвигателя или мощности исполнительного механизма, соотношения переменных оптимальной по быстродействию системы, что обеспечивает повышение экспуатационных характеристик, увеличение надежности технических систем и срока их службы. Формула изобретения
Система адаптивного управления, содержащая объект управления, первьй выход которого соединен с входом выислителя членов степенного ряда пе 1587467
10
15
20
25
30
35
40
5
0
ременного смещения и с входом блока формирования коэффициента обратной связи, выход которого соединен с первым входом умножителя, подключенного выходом к первому входу первого сумматора, выход которого соединен с входом объекта управления, а также блок задания функционального соотношения, подключенный выходом к первому входу второго сумматора, и третий сумматор, подключенный выходом к второму входу первого сумматора, отличающаяся тем, что, с целью повьш1ения точности системы в. условиях параметрических возмущений объекта управления и расширения области применения, в нее введены блок вычисления переменных коэффициентов при соответствующих членах степенного ряда, блок умножителей по числу членов степенного ряда и блок определения функционального соотношения вых переменных, первый вход которого соединен с первым выходом объекта управления, а выход - с вторым входом второго сумматора, подключенного выходом к второму входу блока умножения и первому входу блока вычисления пе- ременных коэффициентов при соответствующих членах степенного ряда, второй вход которого соединен с первым входом блока умножения, причем второй выход объекта управления соединен с вторым входом блока определения функционального соотношения фазовых переменных и с вторым входом вычислителя членов степенного ряда переменного смещения, группа выходов по числу членов степенного ряда которого соединена соответственно с группой входов по числу членов степенного ряда блока вычисле шя переменных коэффициентов при соответствующих членах степенного ряда и первой группой входов блока умножителей по числу членов .. степенного ряда, подключенного второй группой входов к группе выходов по числу членов степенного ряда блока вычисления переменных коэффициентов при соответствующих членах степенного ряда, а группой выходов - к группе входов третьего сумматора.
OsJ
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
| АДАПТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА ФОКУСИРОВКИ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ НА ПРОТЯЖЕННОМ ОБЪЕКТЕ | 1991 |
|
RU2020521C1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1388896A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Устройство для приема дискретных сигналов | 1986 |
|
SU1374444A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
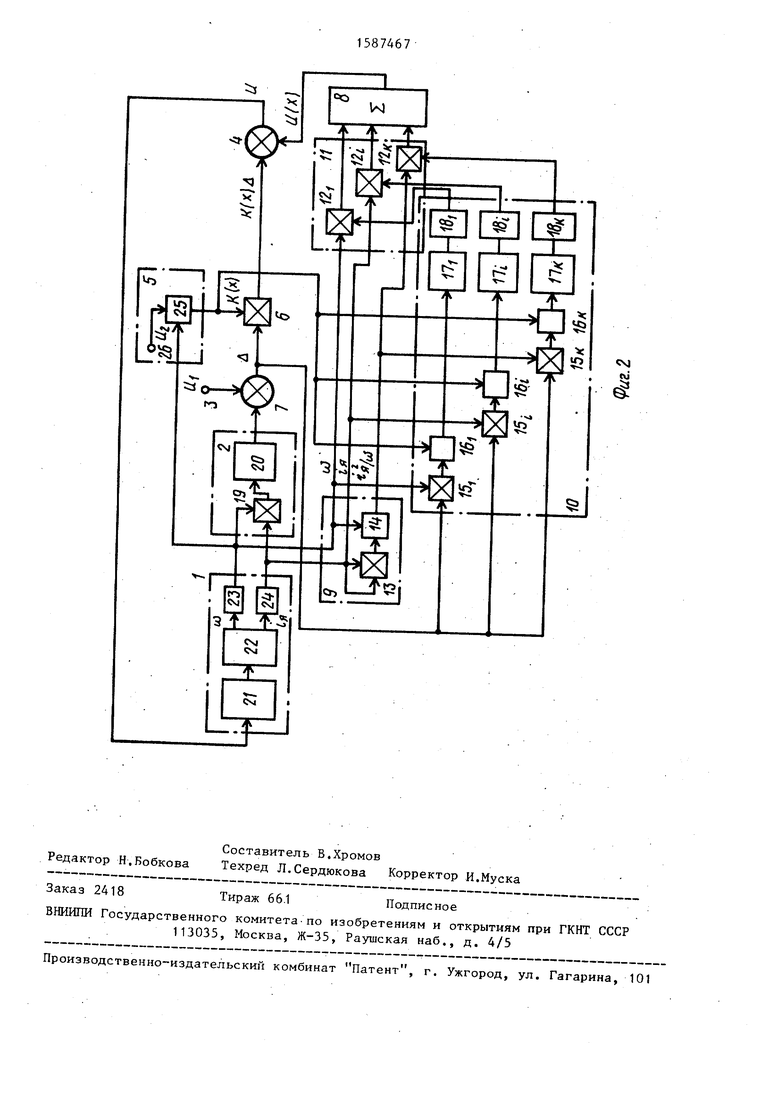
Изобретение относится к адаптивным системам автоматического управления. Целью изобретения является повышение точности системы в условиях параметрических возмущений объекта управления и расширения области применения системы. Система содержит объект управления 1, блок 2 определения функционального соотношения фазовых переменных, блок 3 задания функционального соотношения, первый сумматор 4, блок 5 формирования коэффициента обратной связи, первый умножитель 6, второй сумматор 7, третий сумматор 8, вычислитель 9 членов степенного ряда переменного смещения, блок 10 вычисления переменных коэффициентов при соответствующих членах степенного ряда, блок 11 умножителей, группа их К вторых умножителей 12. 2 ил.
| Способ стабилизации тока якоря электродвигателя постоянного тока | 1984 |
|
SU1270854A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1984 |
|
SU1228207A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
