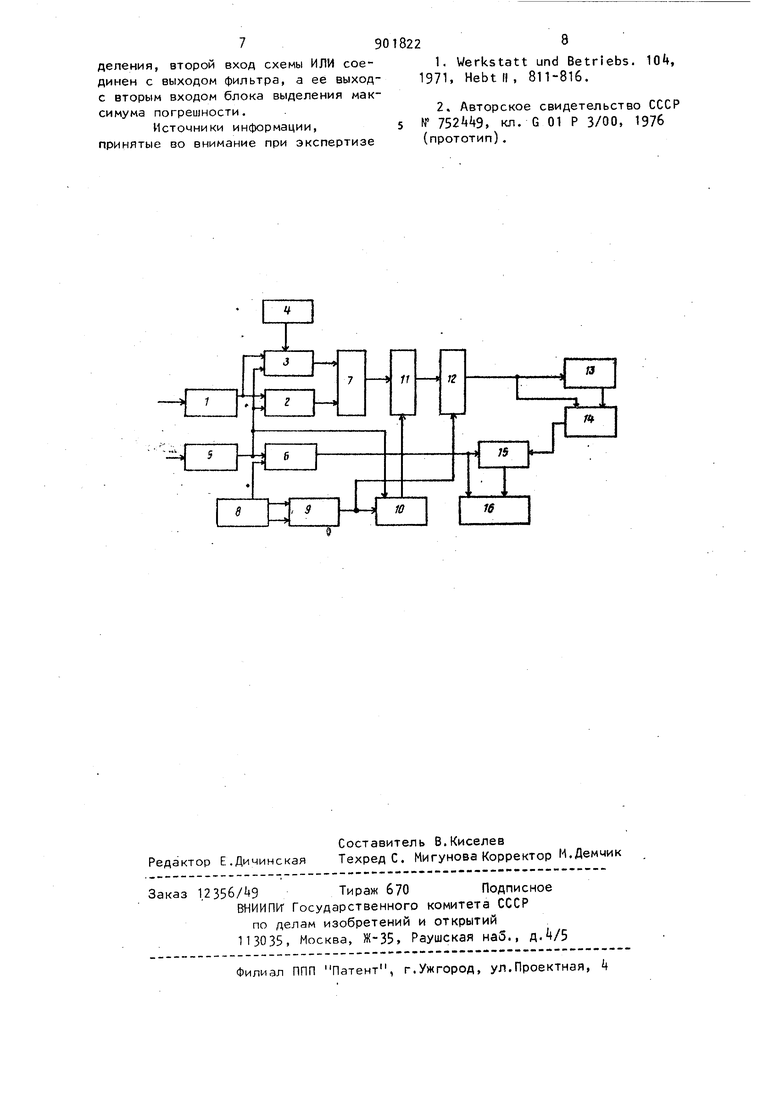
Изобретение относится к измерител ной технике и может быть использовано для определения погрешности механ ческих передач, в частности зубчатых передач и редукторов. Известно устройство для контроля зубчатых передач и редукторов, принцип действия которого основан на выравнивании частот вканалах измерения 13 . Однако, это устройство не обеспечивает достаточной точности контроля Наиболее близким к предлагаемому является устройство для контроля относительной скорости транспортных средств, содержащее импульсные преоб разователи углов поворота ведущего и ведомого звеньев, блок задания циклов, первый вход которого подключен к второму преобразователю, второй - к пульту управления, а выход к первому входу блока выделения максимума погрешности и табло, соединенного также с выходом блока выделе ния максимума погрешности, генератор импульсов и блок задания передаточного отношения, соединенный с пультом, и блок деления. Недостатком известного устройства является относительно низкая точность измерения 12} . Цель изобретения - повышение томности измерения погрешности передачи. Поставленная цель достигается тем, что устройство снабжено блоками определения целого числа и дробной части периодов преобразователя угла поворота ведущего звена, сумматором, блоками сравнения и вычисления угла поворота ведущего звена, при этом первые входы блоков определения целого числа и дробной части периодов подключены к выходу преобразователя угла поворота ведущего звена, вторые входы - к выходу преобразователя угла.поворота ведомого звена, , выходы - к сумматору, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к выходу блока вычисления угла поворота ведущего звена, соединенного с выходами преобразователя угла поворота ведомого звена и блока задания передаточного отношения, выход блока сравнения подключен к входу блока деления, второй вход которого соединен с выходом блока задания передаточного отношения, выход блока деления соединен с вторым входом блока выделения максимума погрешности, а генератор подключен к третьему входу блока определения дробной части периода преобразователя угла поворота ведущего звена. Причем в устройство дополнительно введены цифровой фильтр и схема ИЛИ, входы которых подключены к выходу блока деления, второй вход схемы ИЛИ соединен с выходом фильтра, а ее выход - с вторым входом блока выделения максимума погрешности. На чертеже представлена блок-схема устройства. Устройство содержит импульсный преобразователь 1 угла поворота веду щего звена, связанный со входами бло ка 2 определения целого числа периодов преобразователя { f ри, } блока 3 определения дробной части периода преобразователя угла поворота ведущего звена ( Рр.др. ), при этом сумма упомянутых углов составляет угол поворота ведущего звена Нр- Оди из входов блока 3 соединен с генератором 4 импульсов. Устройство содержит также импульсный преобразователь угла поворота ведомого звена, выход которого подключен ко входам блоков 2 и 3 а также ко входу блока 6 задания циклов. Выходы блоков 2 и 3 соединены с сумматором-блоком 7. К блоку 6 задания циклов подсоединен пульт 8 управления, связанный со вхо дами блока 9 задания передаточного отношения i. Выход последнего подключен ко входу блока 10 выполнения угла поворота f ведущего звена, второй вход которого соединен с выходом усилителя 5. Выходы блоков 7 и 10 подсоединены ко входам блока 1 сравнения, с помощью которого определяют погрешность передачи ЛМ, приведенную к ведущему звену. Выход бло ка 11 соединен с одним входом блока 12 деления, второй вход которого соединен с выходом блока 9, а выход со входом цифрового фильтра 13 и одним из входов схемы ИЛИ 14, соеаиненной в свою очередь с выходом фильтра 13. Выход схемы ИЛИ соединен со входом блока 15 выделения максимума погрешности, выход которого связан с т абло 16. Блок 6 задания циклов подключен ко входам блока 15 выделения максимума погрешности и табло 16. Принцип работы устройства контроля механических передач заключается в измерении в дискретные моменты времени, определяемые входными сигналами усилителя ведомого звена, разности между расчетным значением угла поворота ( ) ведущего звена, соответствующим данному моменту времени, его реальным значением ( ), и соответствующим тому же моменту времени . Измеренное значение разности угла поворота ведущего звена ( ) пересчитывают к ведомому звену. Устройство работает следующим образом. Импульсныр преобразователи 1 и 5 углов поворота формируют короткие импульсы, соответствующие фиксированным значениям углов поворота звеньев. Выходные импульсы с преобразователя 1 поступают на входы блоков 2 и 3. Целое число периодов, соответствующее Углу Трц, , подсчитывается в блоке путем суммирования значений цены деления преобразователя столько раз, сколько успело пройти интервалов с преобразователя угла поворота ведущего звена до прихода очередного импульса с преобразователя угла поворота ведомого звена. В момент прихода импульса с преобразователя 5 определяют значение угла fp . Для этого подсчитывается величина Нр.орГ дробная часть периода преобразователя угла поворота ведущего звена: H.Np.gp , где цена деления датчика, число импульсов генератора i, которое успело пройти в промежутке между импульсом ведомого звена и ближайшим к нему предыдущим импульсом ведущего звена; число импульсов генератора k, которое успело пройти за время, определяемое соседними импульсами вед щего звена, между которы ми был импульс ведомого звена. Значения величин N, и N, ч Р-9Р л считывают в блоке 3. в этом же блоке производится действие по вышеприведе ной формуле. Выходные,величины из блоков 2 и 3 поступают на входы сумматора 7, на выходе которого формируется значение реального угла поворота ведущего зве на в момент прихода импульса ведомого звена 10 UI .. ф р Vu. Р9Р Если погрешность передачи была бы равна нулю, то найденное знамение уг ла равнялось-бы величине (теоре тического или расчетного угла поворо та), которую определяют по формуле .-i) где KW,- число импульсов ведомого звена, прошедших до момента измерени Значение передаточного отношения подсчитывают в блоке 9Исходные данные для расчета задаются на пульте 8. Значение передаточ ного отношения поступает на вход бло ка 10 вычисления угла поворота ве дущего звена. Значения fp и f из блоков 7 и 10 поступают на входы блока 11 сра нения, где определяется погрешность йН Vp - «Р. Однако полученная погрешность отНОСИТСЯ К ведущему звену. Для определения погрешности передачи, приведенной к ведомому звену, необходимо полученную величину noi- решности разделить на значение передаточного отношения. Это осуществляется в блоке 12 деления. Значение при веденной погрешности поступает на вход цифрового фильтра 13 и на один из входов схемы ИЛИ И, на другой вход которой поступает сигнал с выхода цифрового фильтра. Цифровой фильтр служит для исключения случайных высокочастотных составляющих погрешностей и включается при необходимости. Выходная информация со схемы ИЛИ поступает на вход блока 15 выделения максимума погрешности, в котором происходит выделение модуля кинематической или местной погрешности передачи в зависимос ти от заданного цикла измерения. Измерение и фиксация циклов происходит в блоке 6 задания циклов по ведомому звену. Значения циклов измерения поступают с пульта 8. Значения местной или кинематической погрешности и соответствующие им циклы измерения индицируются на табло Тб Формула изобретения 1.Устройство для измерения погрешности механических передач, содержащее импульсный преобразователь угла поворота ведомого звена, подключеный к входу блока задания циклов, второй вход которого соединен с пультом управления, а выход - с первыми входами блока выделения максимума погрешности и табло, соединенного также с выходом блока выделения максимума погрешности, блок задания передаточного отношения, соединенный с пультом, и блок деления, о тличающееся тем, что, с целью повышения точности измерения, оно снабжено блоками определения целого числа и дробной части периодов преобразователя угла поворота ведущего звена, сумматором, блоком сравнения и блоком вычисления угла поворота ведущего звена, при этом первые входы блоков определения целого числа и дробной части периодов подключены к выходу преобразователя угла поворота ведущего звена, вторые входы - к выходу преобразователя угла поворйта ведомого звена, выходы к сумматору, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к выходу блока вычисления угла поворота ведущего звена, соединенного с выходами преобразователя угла поворота ведомого звена и блока задания передаточного отношения, выход блока сравнения подключен к входу блока деления, второй вход которого соединен с выходом блока задания передаточного отношения, выход блока деления соединен с вторым входом блока выделения максимума погрешности, а генератор подключен к третьему входу блока определения дробной части периода преобразователя угла поворота ведущего звена. 2. Устройство по п. 1, отличающееся тем, что в него введены цифровой фильтруй схемэ ИЛИ, при этом вход фильтра и первый вход схемы ИЛИ подключен к выходу блока деления, второй вход схемы ИЛИ соединен с выходом фильтра, а ее выходс вторым входом блока выделения максимума погрешности.. Источники информации,5 принятые во внимание при экспертизе 1. Werkstatt und Betriebs. Ю, 1971, Hebt II , 811-816. 2. Авторское свидетельство СССР , кл. G 01 Р 3/00, 1Э7б (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля относительной скорости механизмов | 1978 |
|
SU734790A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Способ анализа кинематической погрешности зубчатых передач | 1980 |
|
SU998852A2 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1980 |
|
SU896389A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Устройство для контроля кинематической погрешности зубчатых колес | 1980 |
|
SU930006A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство для управления тяжелонагруженным цепным конвейером | 1979 |
|
SU872401A1 |
