Изобретение относится к машиностроению и может быть использовано в манипу- ляторах различного назначения, в частности при сборке микросборок.
Целью изобретения является повышение производительности за счет сокра ще- ния рабочего цикла по времени.
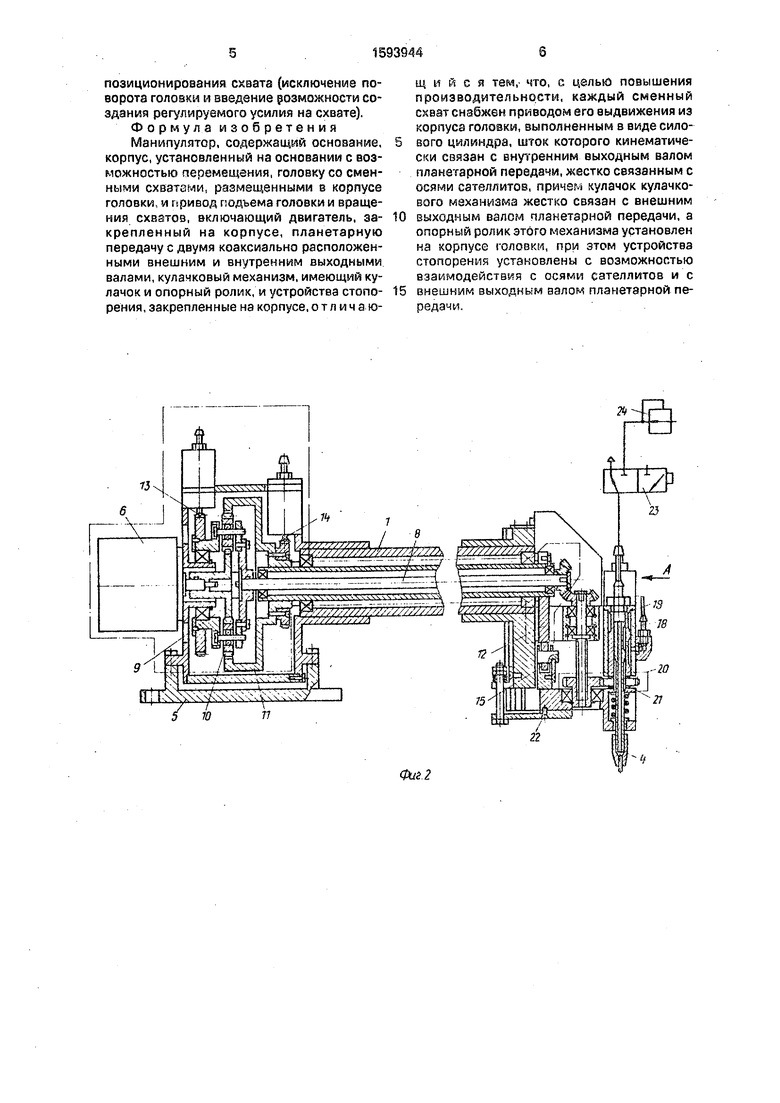
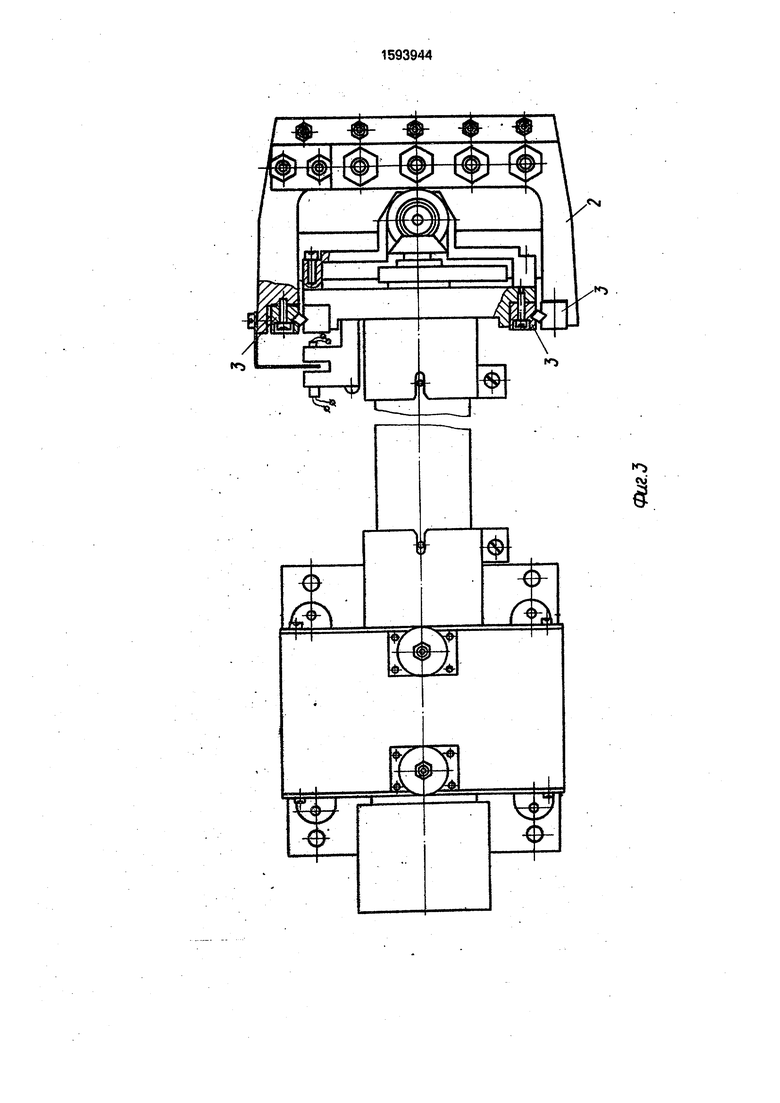
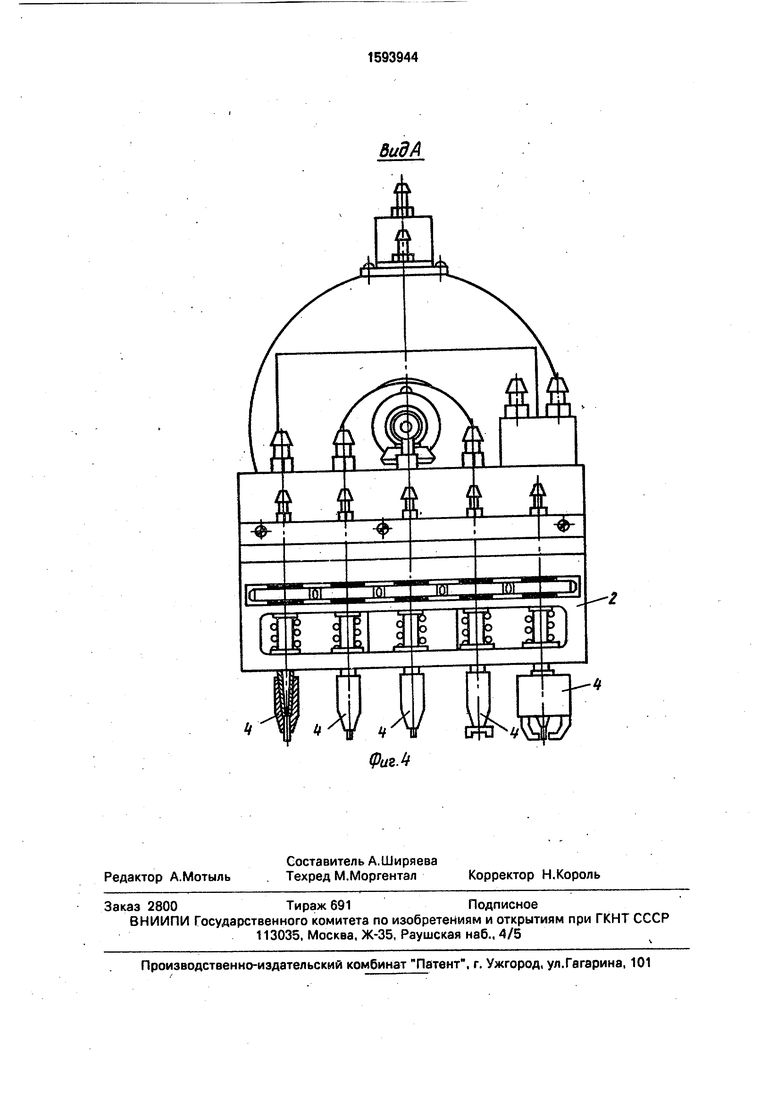
На . 1 показана кинематическая схема манипулятора; на фиг. 2 - манипулятор, общий вид; на фиг. 3 - то же, вид сверху; на фиг. 4 - вид А на фиг. 2.
Манипулятор содержит корпус 1, на котором установлена головка 2 с возможностью линейного перемещения в направляющих 3 корпуса 1, сменные схваты 4, размещенные в корпусе головки 2, и привод подъёма головки и вращения схватов. Корпус 1 установлен на опорной плите 5, которая является подвижным элементом линейного шагового двигателя. Индуктор выполнен в виде основания (не показан) с нанесенной на нем координатной сеткой. Привод подъема головки и вращения схватов состоит из двигателя 6, планетарной передачи с двумя выходными краксиально расположенными внешним 7 и внутренним 8 валами, кулачкового механизма и механизма вращения схватов.
Планетарная передача включает центральное колесо 9, установленное на выходном валу двигателя 6, сателлиты 10, оси которых жестко сязаны с внутренним валом 8, и центральное колесо 11 с внутренними зубьями, жестко связанное посредством внешнего вала 7 с кулачком 12 кулачкрвого механизма подъема головки 2. Причем на корпусе 1 закреплены устройства стопоре-. ния, например фиксаторы 13 и 14, подвижные злементы которых установлены с возможностью взаимодействия с зубчатыми венцами, выполненными соответственно на осях сателлитов 10 и на центральном колесе 11 с. внутренними зубьями. Рабочая поверхность кулачка 12 контактирует с роликом 15, смонтированным на корпусе головки 2. В последней расположены вал 16 поворота схватов и привод 17 вЬ(движения схватов.
Привод 17 выдвижения схватов выполнен в виде силового цилиндра, подпружиненный шток 18 которого расположен в штоковых полостях 19 головки 2, соединен через зубчатую передачу 20 с валом 16 поворота схватов. Причем зубчатые колеса цилиндрической зубчатой передачи 20 уста- новлены на штоке 18 и валу 16 посредством шлицев 21 и 22, а вал 16 посредством конической передачи связан с внутренним валом 8 планетарной передачи. Каждый схват манипулятора снабжен клапаном 23 с редуктором 24 давления, причем вход редуктора
соединены с напором, а выход клапана - с плунжерной полостью 19 головки 2.
Манипулятор работает следующим образом.
Фиксаторы 13 и 14 соединяют внутренний вал 8 и кулачок 12 с корпусом 1. Включается линейный шаговый двигатель, опорная плита 5 с жестко закрепленным на ней корпусом 1 и головкой 2 перемещается
0 и останавливается на позиции загрузки (захвата компонентов) одним из схватов 4 над захватываемым компонентом. Срабатывает клапан 23, шток 18 механизма выдвижения схватов выдвигается под действием давле5 ния рабочей жидкости (воздуха), подаваемого в штоковую полость 19. Усилие на штоке 18 регулируется редуктором 24 давления. После выдвижения схват 4 опускается. Срабатывает фиксатор 14, разъединяя кулачок
0 12 от корпуса 1. Кулачок 12 получает вращение от двигателя 6 через центральное колесо 9, сателлит 10 и центральное колесо 11, вследствие чего головка 2 совместно со схватами 4 опускается в направляющих 3 по
5 координате и останавливается в заданном положении - происходит захват компонента. После захвата компонента возможны два случая: в случае последующего захвата такого же компонента из зтого или другого места
0 захвата головка 2 не поднимается (реверс двигателя не производится), а срабатывает клапан 23, шток 18 под действием пружины со схватом 4 и компонентом поднимается и может перемещаться на позицию установки.
5 В дальнейшем при захвате последующего компонента работает только привод выдвижения, так как величина выдвижения схвата 4 отрегулирована.
Кроме того, в случае последующего за0 хвата другого типоразмера компонента осуществляется реверс двигателя 6, кулачок 12 возвращается в исходное положение. Таким образом после захвата компонента в любом случае производится сначала подъем ком5 понента либо реверсом двигателя, либо штоком со схватом. Для ориентации компонента схват поворачивается на определенный угол. Для зтого срабатывают фиксаторы 14 и 13, соединяя кулачок 12с корпусом 1 и
0 разьединяя ось сателлита 10 от корпуса 1. Схваты 4 получают вращение через звенья 9-10-8- 16-22-20-21.
Спуск схватов производится аналогично подъему. Использование предлагаемого
5 манипулятора позволит снизить знергоем- кость (за счет уменьшения перемещенных масс), повысить производительность (исключение для однотипных компонентов обя- -зательных подъема- поворота головки - поворота схватов) и повышение точности
позиционирования охвата (исключение поворота головки м введение розможности создания регулируемого усилия на схвате). Формула изобретения Манипулятор, содержащий основание, корпус, установленный на основании с возможностью перемещения, головку со сменными схватами, размещенными в корпусе головки, VI гфивод подъема головки и вращения CX8STOB, включающий двигатель, закрепленный на корпусе, планетарную передачу с двумя коаксиально расположенными внешним и внутренним выходными валами, кулачковый механизм, имеющий кулачок и опорный ролик, и устройства стопо- рения, закрепленные на корпусе, отличаю
щ и и с я тем, что, с целью повышения производительности, каждый сменный схват снабжен приводом его выдвижения из корпуса головки, выполненным в виде силового цилиндра, шток которого кинематически связан с внутренним выходным валом планетарной передачи, жестко связанным с осями сателлитов, причем кулачок кулачкового механизма жестко связан с внешним выходным валом планетарной передачи, а опорный ролик этого механизма установлен на корпусе головки, при этом устройства стопорения установлены с возможностью взаимодейств1«я с осями сателлитов и с внешним выходньгм валом планетарной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1371897A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Привод горной машины | 1990 |
|
SU1747689A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Манипулятор | 1982 |
|
SU1123844A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах различного назначения. Цель изобретения - повышение производительности за счет сокращения рабочего цикла по времени. Манипулятор содержит корпус 1, на котором установлена головка 2 с возможностью линейного перемещения в направляющих 3 корпуса 1, сменные схваты 4, размещенные в корпусе головки 2 и привод подъема головки и вращения схватов. Привод 17 выдвижения схватов выполнен в виде силового цилиндра, подпружиненный шток 18 которого расположен в штоковых полостях 19 головки 2, соединен через зубчатую передачу 20 с валом поворота схватов, который посредством конической передачи связан с внутренним валом 8 планетарной передачи. На корпусе 1 закреплены устройства стопорения, например фиксаторы 13 и 14, подвижные элементы которых установлены с возможностью взаимодействия с зубчатыми венцами, выполненными соответственно на осях сателлитов 10 и на центральном колесе 11. 4 ил.
Фиг. 2
fO
J
t
f
дидА
| Манипулятор | 1986 |
|
SU1371897A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
