
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового перемещения конвейера | 1989 |
|
SU1682266A1 |
| Устройство прерывистого движения замкнутого рабочего органа конвейера | 1988 |
|
SU1583331A1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Привод прерывистого вращения | 1988 |
|
SU1663282A1 |
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Резонансный привод | 1988 |
|
SU1544550A1 |
| Привод перемещения исполнительного органа робота | 1982 |
|
SU1219335A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| Манипулятор | 1982 |
|
SU1085805A1 |
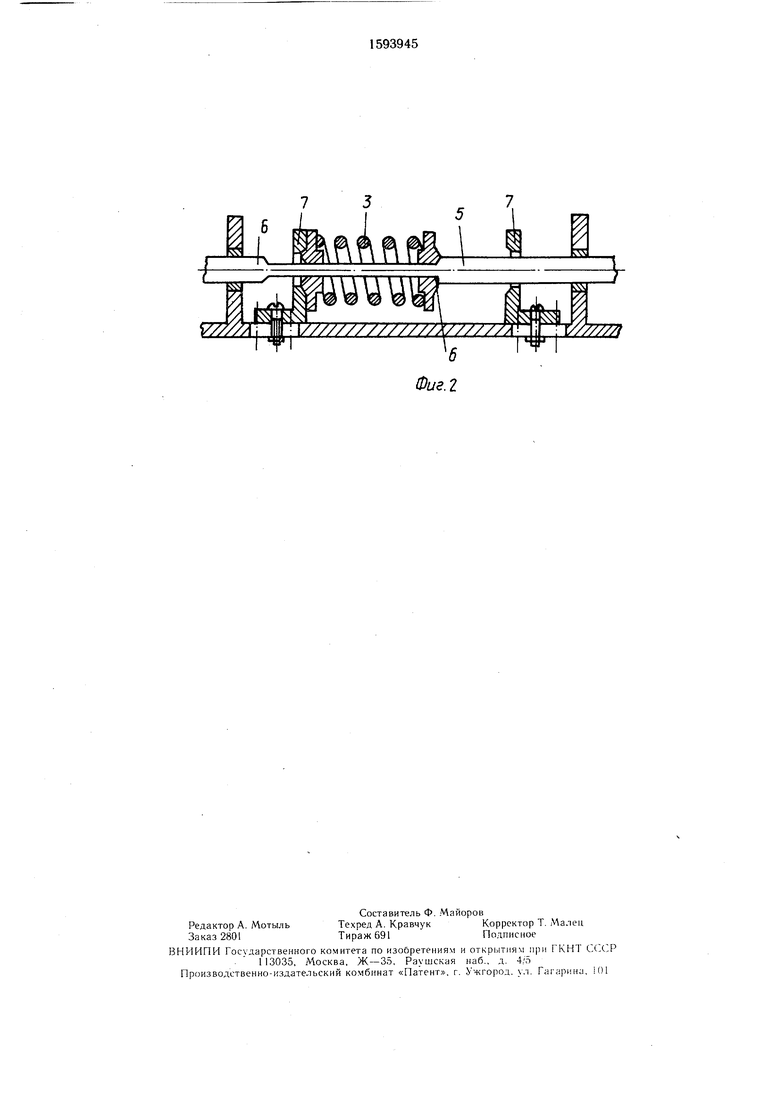
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в приводе перемещения руки манипулятора. Целью изобретения является повышение быстродействия за счет обеспечения действия усилия от упругого элемента во время выстоя вдоль траектории движения ведомого звена. Исходным положением привода руки 1 является положение, при котором упругий элемент 3 сжат между одними из упоров 6 и 7, закрепленных соответственно на дополнительном звене 5 и руке 1, а звено 5 опирается на один из управляемых упоров 4. При этом система, образованная звеном 5, шатуном 8 и рычагом 9, занимает положение неустойчивого равновесия. При включении микродвигателя 11, на валу 10 которого закреплен рычаг 9, система выходит из положения неустойчивого равновесия, и потенциальная энергия упругого элемента 3 за счет отваливания звена 5 от упора 4 преобразуется в кинетическую энергию руки 1. В зависимости от точки позиционирования выдвигается соответствующий упор 4 и происходит обратное преобразование энергии. Потери на перемещение руки 1 покрываются двигателем 2. 2 ил.
| Привод перемещения исполнительного органа робота | 1982 |
|
SU1219335A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
