| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Запястье манипулятора | 1987 |
|
SU1426779A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Запястье манипулятора | 1981 |
|
SU952577A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
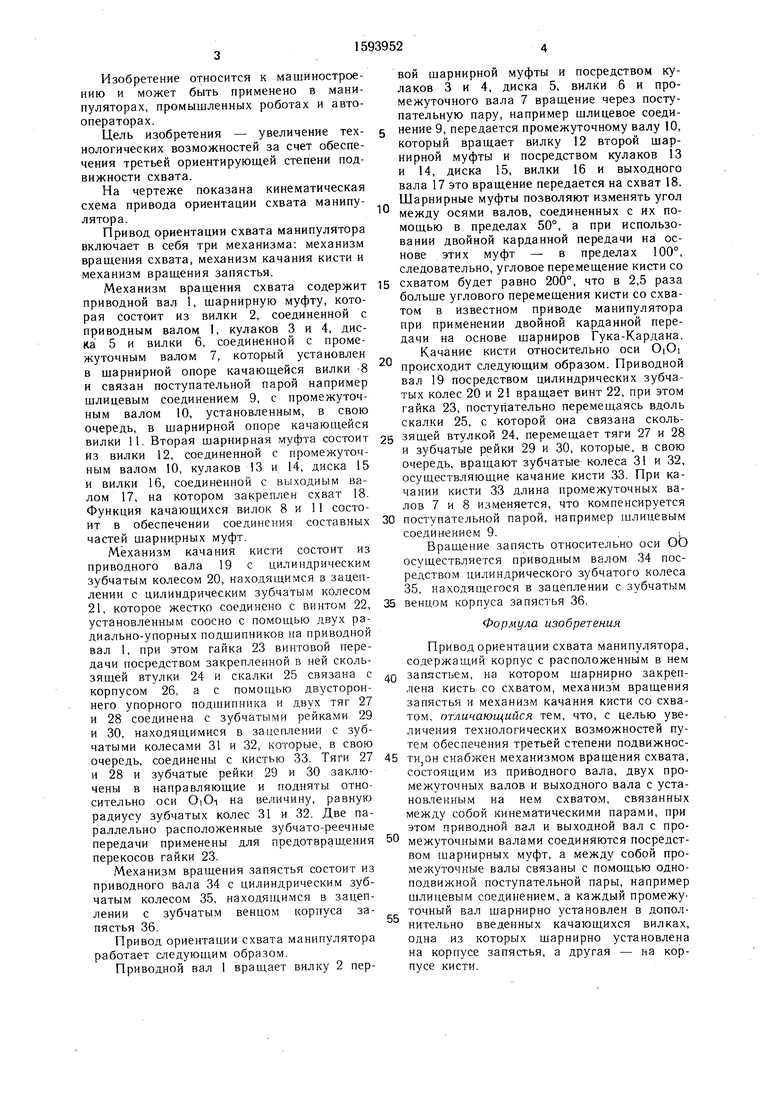
Изобретение относится к машиностроению и может быть применено в манипуляторах, промышленных роботах и автооператорах. Цель изобретения - увеличение технологических возможностей за счет обеспечения третьей ориентирующей степени подвижности схвата. Привод ориентации схвата манипулятора включает в себя три механизма : механизм вращения схвата, механизм качания кисти и механизм вращения запястья. Механизм вращения схвата содержит приводной вал 1, шарнирную муфту, промежуточные валы 7 и 10, соединенные поступательной парой 9, и шарнирную муфту с выходным валом 17. Промежуточные валы 7 и 10 устоновлены в качающихся вилках 8 и 11. Механизм качания кисти состоит из приводного вала 19, зубчатой пары 20 и 21, винта 22 и гайки 23. Гайка 23 через тяги 27 и 28 и зубчатые рейки 29 и 30 кинематически связана с зубчатыми колесами 31 и 32, закрепленными на корпусе кисти 33. Механизм вращения запястья состоит из приводного вала 34 зубчатого колеса 35, находящегося в зацеплении с зубчатым венцом корпуса запястья 36. 1 ил.
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
