(54) ГРУЗОЗАХВАТ ТЕЛЕСКОПИЧЕСКИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Телескопический захват крана-штабелера | 1985 |
|
SU1331748A1 |
| Телескопический грузозахват | 1985 |
|
SU1252252A1 |
| Телескопический захват | 1977 |
|
SU737355A1 |

I
Изобретение относится к промышленному транспорту, в частности к грузозахватам телескопическим для кранов-штабелеров.
Известен грузозахват телескопический, преимущественно для кранов-щтабелеров, содержащий нижнюю неподвижную, подвижные среднюю и грузонесуш,ую секции, привод перемещения секц11Й, включающий в себя зубчато-реечную передачу 1.
Однако известный грузозахват имеет больщие габариты по щирине и высоте.
Наиболее близким техническим рещением к изобретению является грузозахват телескопический, преимущественно для крановштабелеров, содержащий нижнюю неподвижную, подвижные среднюю и грузонесущую секции, привод перемещения секций, включающий в себя зубчато-реечную передачу, опорные ролики для грузонесущей секции, смонтированные посредством вертикальных осей на средней секции, и направляющие элементы, расположенные на неподвижной и грузонесущей секциях 2.
Известная конструкция позволяет уменьшить в определенных пределах габарит захвата по высоте за счет размещения осей опорных роликов в вертикальной плоскости.
НО не позволяет уменьшить габариты захвата по ширине.
Целью изобретения является улучшение эксплуатационных характеристик захвата за счет уменьшения его габаритов по ширине и высоте.
Это достигается тем, что опорные ролики для грузонесущей секции, смонтированные на средней секции, расположены между направляющими элементами грузонесущей и неподвижной секции для взаимодействия с последними, при этом рабочая поверхность
10 роликов имеет V-образную форму для размещения внутри нее направляющих элементов.
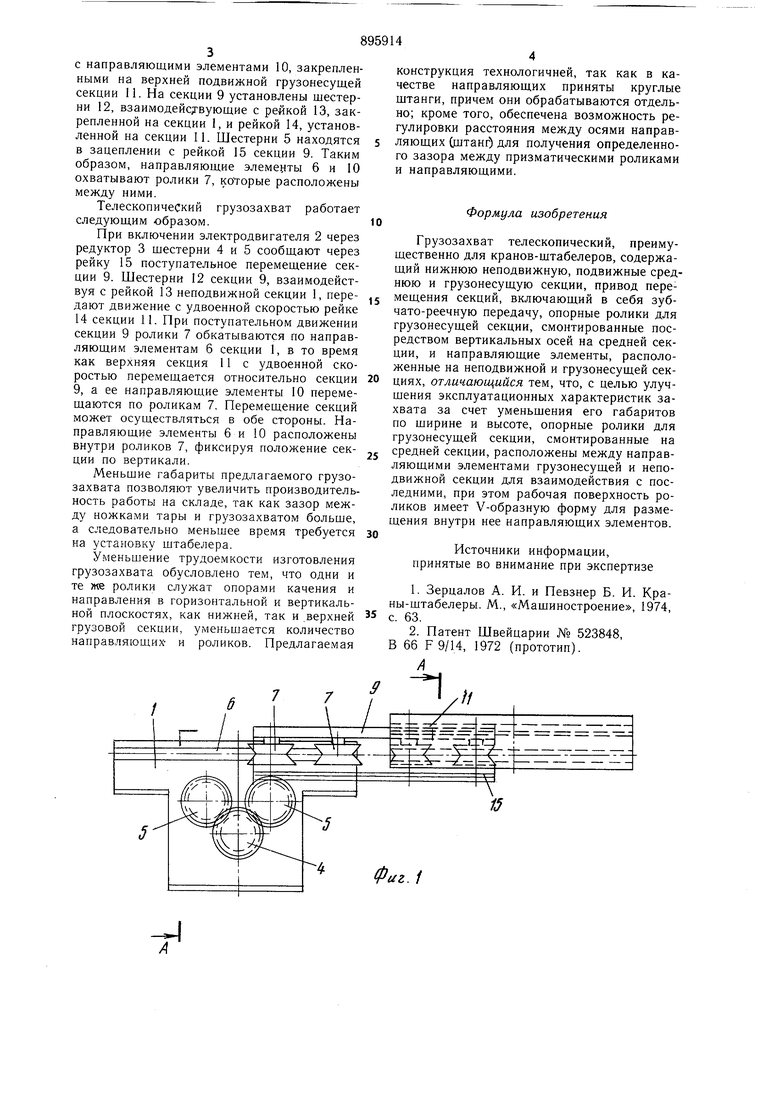
На фиг. 1 показан грузозахват, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1.
Грузозахват содержит неподвижную сек15цию 1, на которой установлен привод, состоящий из электродвигателя 2 и редуктора 3, соединенного с шестернями 4 и 5.
На секции 1 закреплены направляющие элементы 6, взаимодействующие с роликами 7, установленными на вертикальной оси 8,
20 закрепленными на средней подвижной секции 9 и имеющими V-образную форму. С другой стороны ролики 7 взаимодействуют
с направляющими элементами 10, закрепленными на верхней подвижной грузонесущей секции 11. На секции 9 установлены шестерни 12, взаимодейс7вующие с рейкой 13, закрепленной на секции 1, и рейкой 14, установленной на секции 11. Шестерни 5 находятся в зацеплении с рейкой 15 секции 9. Таким образом, направляющие злеме11ты 6 и 10 охватывают ролики 7, которые расположены между ними.
Телескопический грузозахват работает следующим образом.
При включении электродвигателя 2 через редуктор 3 щестерни 4 и 5 сообщают через рейку 15 поступательное перемещение секции 9. Шестерни 12 секции 9, взаимодействуя с рейкой 13 неподвижной секции 1, передают движение с удвоенной скоростью рейке 14 секции 11. При поступательном движении секции 9 ролики 7 обкатываются по направляющим элементам 6 секции 1, в то время как верхняя секция 11 с удвоенной скоростью перемещается относительно секции 9, а ее направляющие элементы 10 перемещаются по роликам 7. Перемещение секций может осуществляться в обе стороны. Направляющие элементы 6 и 10 расположены внутри роликов 7, фиксируя положение секции по вертикали.
Меньщие габариты предлагаемого грузозахвата позволяют увеличить производительность работы на складе, так как зазор между ножками тары и грузозахватом больще, а следовательно меньшее время требуется на установку штабелера.
Уменьшение трудоемкости изготовления грузозахвата обусловлено тем, что одни и те же ролики служат опорами качения и направления в горизонтальной и вертикальной плоскостях, как нижней, так и верхней грузовой секции, уменьшается количество направляюших- и роликов. Предлагаемая
конструкция технологичней, так как в качестве направляющих приняты круглые щтанги, причем они обрабатываются отдельно; кроме того, обеспечена возможность регулировки расстояния между осями направляющих Сщтанг) для получения определенного зазора между призматическими роликами и направляющими.
Формула изобретения
Грузозахват телескопический, преимущественно для кранов-щтабелеров, содержащий нижнюю неподвижную, подвижные среднюю и грузонесущую секции, привод перемещения секций, включающий в себя зубчато-реечную передачу, опорные ролики для грузонесущей секции, смонтированные посредством вертикальных осей на средней секции, и направляющие элементы, расположенные на неподвижной и грузонесущей секциях, отличающийся тем, что, с целью улучщения эксплуатационных характеристик захвата за счет уменьщения его габаритов по ширине и высоте, опорные ролики для грузонесушей секции, смонтированные на средней секции, расположены между направляющими элементами грузонесущей и неподвижной секции для взаимодействия с последними, при этом рабочая поверхность роликов имеет V-образную форму для размещения внутри нее направляющих элементов.
Источники информации, принятые во внимание при экспертизе
/J
б f2 1
ff 7
J
Фиг. 2
