| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Устройство для сборки преимущественно узлов уплотнения электролитических конденсаторов | 1989 |
|
SU1700621A1 |
| Машина для мойки стеклянной тары | 1983 |
|
SU1146278A1 |
| Устройство для бракеража ампул, наполненных прозрачной жидкостью | 1977 |
|
SU682799A1 |
| Устройство для контроля электрических параметров радиодеталей | 1987 |
|
SU1619349A1 |
| Роторно-конвейерная линия | 1990 |
|
SU1815153A1 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
| Загрузочно-разгрузочное устройство | 1984 |
|
SU1199578A1 |
Изобретение относится к контролю радиодеталей по электрическим параметрам, в частности к устройствам для контроля и сортировки стержней с цилиндрической точкой магнитной пленкой. Цель изобретения - повышение качества контроля, повышение производительности и упрощение конструкции. Цель достигается за счет того, что при загрузке стержней в индукционную катушку 21 стержень подается в канал катушки зажимными губками, установленными на каретке 10, по окончании контроля стержни выгружаются из индукционной катушки 21 зажимными губками, установленными на каретке 23 и в зависимости от результатов контроля подаются в одну из полостей бункера 46, установленного под кареткой 23. Перемещения бункера 46 для сортировки стержней производится при помощи копиров, установленных на каретке 23 с возможностью взаимодействия с подвижным и неподвижным упорами бункера 46. Полость бункера 46 разделена на две части продольной перегородкой. 6 ил.
3 37 5 S6 55 351344 34 4 43
55 474S 514 4350 5/ /
(Pui.1
сл о
00
ю
4Ь.
1110
Изобретение относится к контролю радиодеталей по электрическим параметрам, в частности к устройствам для контроля и сортировки стержней с цилиндрической тонкой магнитной пленкой,
Цель изобретения - повышение качества контроля за счет обеспечения контроля в штатных условиях, повышение производительности и упрощение конструкции.
На фиг.1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг.1; на фиг. 4 - вид В на фиг.1; на фиг.5-, вид Г на фиг.1; на фиг.6 - разрез Д-Д на фиг.1.
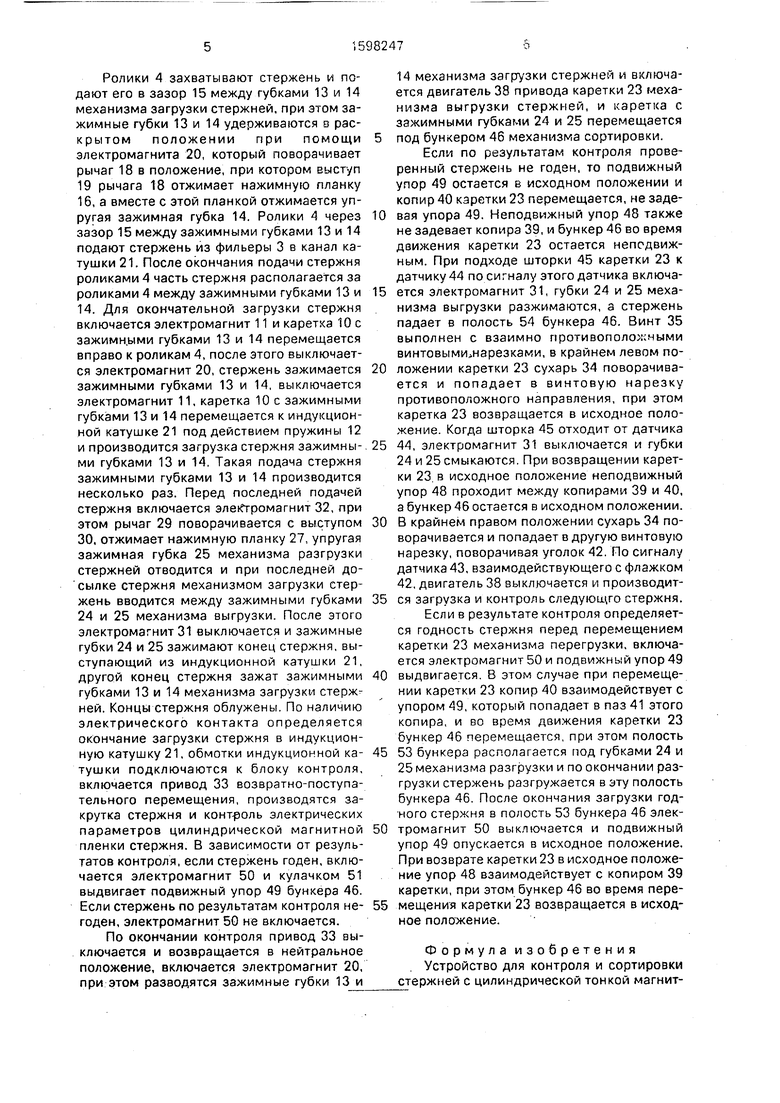
Устройство содержит установленный на основании 1 механизм подачи стержней, включающий вибролоток2 с торцовой фильерой 3, подающие обрезиненные ролики 4, на корпусе которых закреплен датчик 5 наличия стержней с фотодиодом б и оптическим волокном 7. Ролики 4 механизма подачи приводятся во вращение электродвигателями 8 через редуктор 9.Механизм загрузки стержней предназначен для загрузки стержней в индукционную катушку и выполнен в виде каретки 10, приводимой в движение электромагнитом 11с пружиной 12, снабженной зажимными губками, жесткой зажимной губкой 13 и упругой зажимной губкой 14, между которыми в зазоре 15 может быть размещен стержень. Нажимная планка 16, подпружиненная пружиной 17, обеспечивает смыкание упругой зажимной губки 14 с жесткой зажимной губкой 13. Рычаг 18с выступом 19 на конце, соединенный с электромагнитом 20, обеспечивает разьединение зажимных губок 14 и 13, взаимодействуя выступом 19 с подпружиненной планкой 16. Индукционная катушка 21 выполнена с каналом для размещения стержней, установлена на основании 1 неподвижно , параллельно его опорной плоскости, и закреплена на планке 22.
Механизм выгрузки стержней из индукционной катушки 21 содержит каретку 23 с жесткой зажимной губкой 24, выполненной в виде оси, и упругой зажимной губкой 25, линию 26 разъема между зажимными губками. Нажимная планка 27, подпружиненная пружиной 28, обеспечивает смыкание зажимных губок 24 и 25. Рычаг 29 с выступом 30 на конце предназначен для размыкания зажимных губок 24 и 25. Рычаг 29 соединен с электромагнитом 31 и взаимодействует выступом 30 с нажимной планкой 27. Жесткая зажимная губка 24 через зубчатую пару 32 соединена с приводом 33 возвратно-вращательного перемещения. На каретке23 закреплен сухарь 34. установленный с возможностью взаимодействия с ходовым
винтом 35. Каретка 23 установлена в направляющих 36 скольжения. Ходовой винт 35 через зубчатую передачу 37 приводится во вращение двигателем 38. Каретка 23
снабжена копирами 39 и 40, в которых выполнены пазы 41. На сухаре 34 закреплен уголок 42, установленный с возможностью взаимодействия с датчиком 43, при помощи которого контролируется крайнее правое
положение каретки 23. На каретке 23 закреплен датчик 44, установленный с возможностью взаимодействия с неподвижно закрепленной шторкой 45. Индукционная катушка 21 расположена между зажимными
губками 13 и 14 механизма загрузки и зажимными губками 24 и 25 механизма выгрузки стержней.
Механизм сортировки выполнен в виде бункера 46, установленного на основании
под кареткой 23 механизма выгрузки стержней с возможностью возвратно-поступательного перемещения на направляющих 47 перпендикулярно каналу индукционной катушки 21. Бункер 46 снабжен неподвижным упором 48, жестко соединенным с бун- кером, и подвижным упором 49, выполненным в виде штыря. Для привода упора 49 предназначен электромагнит 50, соединенный с кулачком 51. Бункер 46 выполнен с продольной перегородкой 52, раз- деляющей его на полости 53 и 54. Перегородка 52 расположена параллельно каналу индукционной катушки 21. Копир 39 каретки 23 установлен с возможностью взаимодействия с неподвижным упором 48 бункера 46, а копир 40 - с возможностью взаимодействия с подвижным упором 49 бункера 46. В исходном положении бункера 46 его полость 54, предназначенная для
приема негодных изделий, располагается под губками 24 и 25 механизма выгрузки стержней. Это положение бункера 46 контролируется при помощи датчика 55. Устройство также содержит блок управления (не
показан).
Устройство работает следующим образом.
Стержни, предназначенные для контроля, располагаются на вибролотке 2. При включении вибролотка 2 стержни перемещаются к фильере 3, при этом один из стержней входит в отверстие фильеры и через это отверстие пе;эемещается к датчику 5, где
перекрывает луч из статического волокна 7. По сигналу фотодиода 6 при помощи системы управления включаются электродвигатель 8 привода роликов 4 и электромагнит 20, и после небольшой задержки выключается привод вибролотка 2.
Ролики 4 захватывают стержень и подают его в зазор 15 между губками 13 и 14 механизма загрузки стержней, при этом зажимные губки 13 и 14 удерживаются в раскрытом положении при помощи электромагнита 20, который поворачивает рычаг 18 в положение, при котором выступ 19 рычага 18 отжимает нажимную планку 16, а вместе с этой планкой отжимается упругая зажимная губка 14. Ролики 4 через зазор 15 между зажимными губками 13 и 14 подают стержень из фильеры 3 в канал катушки 21. После окончания подачи стержня роликами 4 часть стержня располагается за роликами 4 между зажимными губками 13 и 14. Для окончательной загрузки стержня включается электромагнит 11 и каретка 10 с зажимными губками 13 и 14 перемещается вправо к роликам 4, после этого выключается электромагнит 20, стержень зажимается зажимными губками 13 и 14, выключается электромагнит 11, каретка 10 с зажимными губками 13 и 14 перемещается к индукционной катушке 21 под действием пружины 12 и производится загрузка стержня зажимными губками 13 и 14, Такая подача стержня зажимными губками 13 и 14 производится несколько раз. Перед последней подачей стержня включается эле1Сгромагнит 32, при этом рычаг 29 поворачивается с выступом 30, отжимает нажимную планку 27, упругая зажимная губка 25 механизма разгрузки стержней отводится и при последней до- сылке стержня механизмом загрузки стержень вводится между зажимными губками 24 и 25 механизма выгрузки. После этого электромагнит 31 выключается и зажимные губки 24 и 25 зажимают конец стержня, выступающий из индукционной катушки 21, другой конец стержня зажат зажимными губками 13 и 14 механизма загрузки стерж - ней. Концы стержня облужены. По наличию электрического контакта определяется окончание загрузки стержня в индукционную катушку 21, обмотки индукционной катушки подключаются к блоку контроля, включается привод 33 возвратно-поступательного перемещения, производятся закрутка стержня и конт-роль электрических параметров цилиндрической магнитной пленки стержня. В зависимости от результатов контроля, если стержень годен, включается электромагнит 50 и кулачком 51 выдвигает подвижный упор 49 бункера 46. Если стержень по результатам контроля негоден, электромагнит 50 не включается.
По окончании контроля привод 33 выключается и возвращается в нейтральное положение, включается электромагнит 20, при этом разводятся зажимные губки 13 и
14 механизма загрузки стержней и включается двигатель 38 привода каретки 23 механизма выгрузки стержней, и каретка с зажимными губками 24 и 25 перемещается
под бункером 46 механизма сортировки.
Если по результатам контроля проверенный стержень не годен, то подвижный упор 49 остается в исходном положении и копир 40 каретки 23 перемещается, не задевая упора 49. Неподвижный упор 48 также не задевает копира 39, и бункер 46 во время движения каретки 23 остается неподвижным. При подходе шторки 45 каретки 23 к датчику 44 по сигналу этого датчика включается электромагнит 31, губки 24 и 25 механизма выгрузки разжимаются, а стержень падает в полость 54 бункера 46. Винт 35 выполнен с взаимно противоположными винтовыми нарезками, в крайнем левом положении каретки 23 сухарь 34 поворачивается и попадает в винтовую нарезку противоположного направления, при этом каретка 23 возвращается в исходное положение. Когда шторка 45 отходит от датчика
44, электромагнит 31 выключается и губки
24и 25 смыкаются. При возвращении каретки 23. в исходное положение неподвижный упор 48 проходит между копирами 39 и 40, а бункер 46 остается в исходном положении.
В крайнем правом положении сухарь 34 поворачивается и попадает в другую винтовую нарезку, поворачивая уголок 42. По сигналу датчика 43, взаимодействующего с флажком 42, двигатель 38 выключается и производится загрузка и контроль следующго стержня. Если в результате контроля определяется годность стержня перед перемещением каретки 23 механизма перегрузки, включается электромагнит 50 и подвижный упор 49
выдвигается. В этом случае при перемещении каретки 23 копир 40 взаимодействует с упором 49, который попадает в паз 41 этого копира, и во время движения каретки 23 бункер 46 перемещается, при этом полость
53 бункера располагается под губками 24 и
25механизма разгрузки и по окончании разгрузки стержень разгружается в эту полость бункера 46. После окончания загрузки год- ного стержня в полость 53 бункера 46 электромагнит 50 выключается и подвижный упор 49 опускается в исходное положение. При возврате каретки 23 в исходное положение упор 48 взаимодействует с копиром 39 каретки, при этом бункер 46 во время перемещения каретки 23 возвращается в исходное положение.
Формула изобретения Устройство для контроля и сортировки стержней с цилиндрической тонкой магнитной пленкой, содержащее установленные на основании механизм подачи стержней, механизмы загрузки и выгрузки стержней, выполненные в виде кареток с зажимными губками, соединенную с блоком контроля индукционную катушку с каналом для размещения стержней, установленную между зажимными губками механизмов загрузки и выгрузки стержней, и механизм сортировки стержней, отличающееся тем, что, с целью повышения качества контроля, производительности и упрощения конструкции, индукционная катушка установлена на основании неподвижно, параллельно его опорной плоскости, а механизм сортировки
Bad 6
16
26 ig 29 14 Ц
Вид г
i9 41 48 Фиг. 5
0
5
выполнен в виде бункера с продольной перегородкой, расположенной параллельно каналу индукционной катушки, установленного на основании под кареткой механизма выгрузки стержней с возможностью возвратно-поступательного перемещения пер- пендикулярно каналу индукционной катушки, при этом бункер снабжен подвижным и неподвижным упорами, а каретка механизма выгрузки стержней снабжена копирами для привода бункера механизма сортировки, установленными с возможностью взаимодействия с подвижным и неподвижным упорами бункера.
Вид В
9
8
Фие.
20
Фиг. 4
Фиг. 6
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
