Изобретение относится к весоизме- )ительной технике, в частности к точным устройствам для сортировки По массе мелких предметов массы порядка 0,5-5,0 г на весовые группы.
Целью изобретения является повы- юение точности.
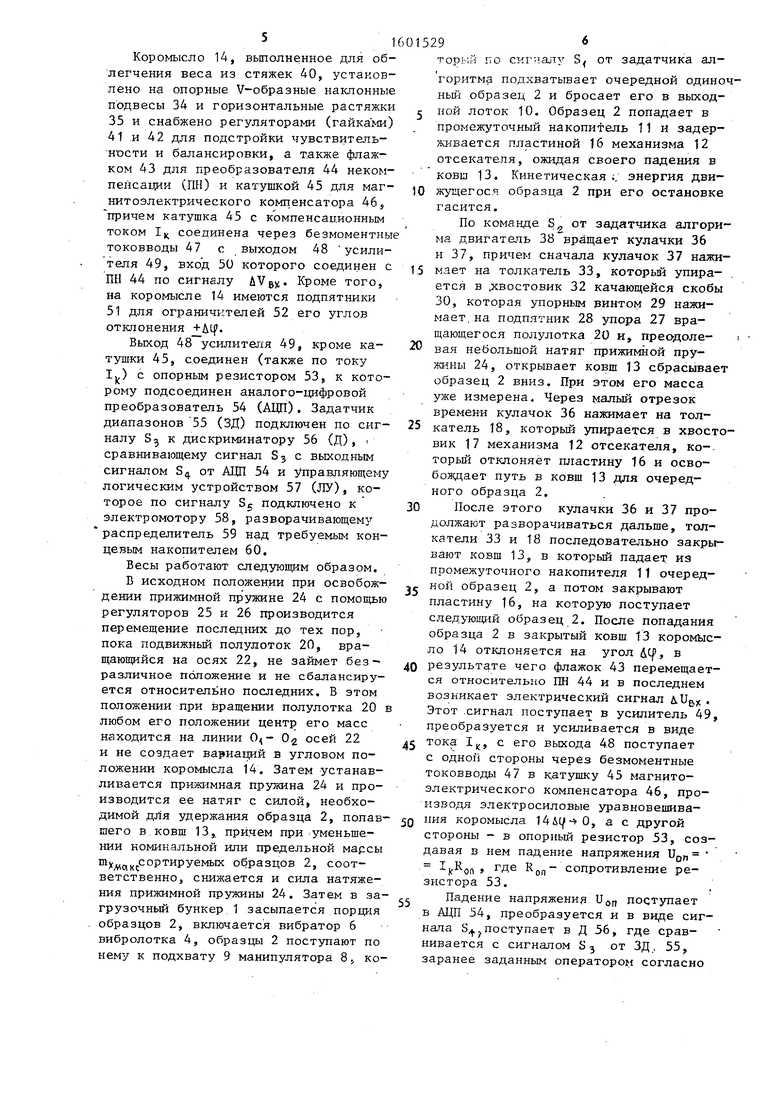
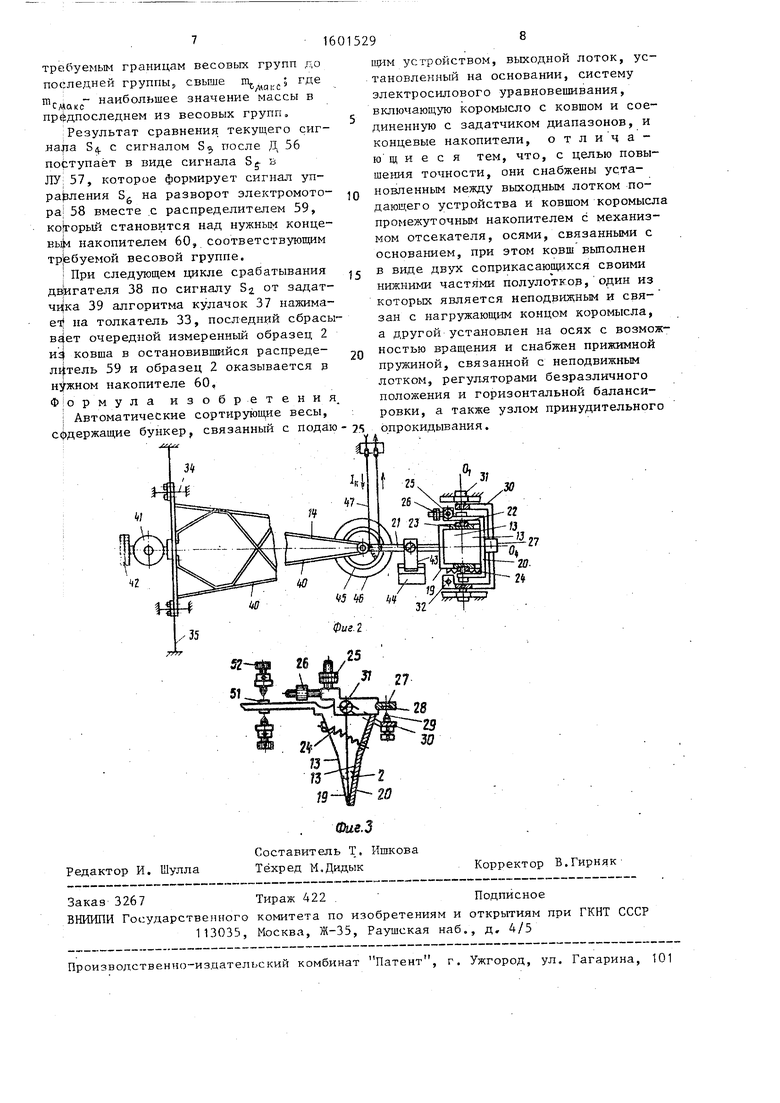
На фиг. 1 представлена схема весов; на фиг. 2 - коромысло вместе с ковшом, вид сверху; на фиг. 3 - ковш,
вид сбоку.
Автоматические сортируюшце весы содержат бункер 1 (загрузочный) для порции сортируемых образцов 2, подающее устройство 3, например вибролоток 4 с упругими лентами 5 и электромаг- нитным вибратором 6, основание 7, манипулятор 8 с подхватом 9., например, вакуумного типа, выходной лоток 10, промежуточный накопитель П одиноч-. ный образцов 2 и механизм 12.отсека- теля, установленные последовательно после выходного лотка 10 перед ковшом 13 коромысла 14.
Промежуточный накопитель 11 и механизм отсекателя 12 находятся в непосредственной близости к ковшу 13 для уменьшения динамических ударов, а следовательно, увеличения быстро- действия и точности. Промежуточньй накопитель 11, выполненный, например Е виде нижнего отрезка 15 выходного лотка 10, содержит вpaD aющyюcя пластину 16 механизма 12 отсекателя, снабженную хвостовиком 17, взаимодействуюшдм с подпружиненным толкателем 18.
Ковш 13 выполнен в виде двух полулотков 19 и 20, а именно, неподвижного полулотка 19, жестко установленного на нагружающем плече 21 коромысла 14, и неподвижно 5 о, прилегающего к первому полулотку 19, вращающегося полулотка 20, установленного на осях 22 и камниевых опорах 23 и снабженного прижимной пружиной 24, регуляторами 25 и 26, например гайками, безразличного равновесия и горизонтальной балансировки подвижного полулотка 20 относительно указанных осей 22 (линия О, - 02.) , а также узлом принудительного опрокидывания с упором 27. Подпятник 28 упора 27 служит для взаимодействия с упорным винтом 29 качающейся скобы 30, установленной на осях 31 и снабженной хвостовиком 32 для подпружиненного толкателя 33. Подпятник 28 расположен по оси коромысла 14 для того, чтобы устранить появ.пение боковых перекашивающи сил, действунищх на опорные подвесы 34 и 35. Толкатели 18 и 33 опираются на вращаюпщеся развернутые один относительно другого кулачки 36 и 37 приводимые в движение двигателем 38 задатчика 39 алгоритма, например, в виде задатчика скорости цикла или реле времени, вырабатывающего сигнал S и S. соответственно дня управления манипулятором 8 и двигат(глем 38
Коромысло 14, выполненное для облегчения веса из стяжек 40, установлено на опорные V-образные наклонны подвесы 34 и горизонтальные растяжк 35 и снабжено регуляторами (гайка ми 41 и 42 для подстройки чувствитель- н ости и балансировки, а также флажком 43 для преобразователя 44 некомпенсации (ПН) и катушкой 45 для магнитоэлектрического компенсатора 46, причем катушка 45 с компенсационным током 1 соединена через безмоментны токовводы 47 с выходом 48 усилителя 49, вход 50 которого соединен с пи 44 по сигналу uVe). Кроме того, на коромысле 14 имеются подпятники 51 для ограничителей 52 его углов отклонения +t(
Выход 48 усилителя 49, кроме катушки 45, соединен (также по току 1,) с опорным резистором 53, к которому подсоединен аналого-цифровой преобразователь 54 (АЦП). Задатчик диапазонов 55 (ЗД) подключен по сигналу БЗ к дискриминатору 56 (Д), . сравнивающему сигнал 83 с выходным сигналом Sq. от АЦП 54 и Управляющему логическим устройством 57 (ЛУ), которое по сигналу SK подключено к электромотору 58, разворачивающему распределитель 59 над требуемом концевым накопителем 60.
Весы работают следуюшдм образом. В исходном положении при освобождении прижимной пр ужине 24 с помощью регуляторов 25 и 26 производится перемещение последних до тех пор, пока подвижный полулоток 20, вращающийся на осях 22, не займет безразличное положение и не сбалансиру- ется относительно последних. В этом положении при вращении полулотка 20 в любом его положении центр его масс находится на линии 0 осей 22 и не создает вариаций в угловом положении коромысла 14. Затем устанавливается прижимная пружина 24 и производится ее натяг с силой, необходимой для удержания образца 2, попавшего в ковш 13,. причем при уменьшении номинальной или предельной марсы ffiy jjii copTHpyeMbix образцов 2, соответственно, снижается и сила натяжения прижимной пружины 24. Затем в загрузочный бункер 1 засыпается порция образцов 2, включается вибратор 6 вибролотка 4, образцы 2 поступают по нему к подхвату 9 манипулятора 8,, ко20
торьй по сигналу S от задатчика алгоритма подхватывает очередной одиночный образец 2 и бросает его в выход- 5 ной лоток 10, Образец 2 попадает в промежуточный накопитель 11 и задерживается пластиной 16 механизма 12 отсекателя, ожидая своего падения в ковш 13. Кинетическая;, энергия дви- 10 ж тцегося образца 2 при его остановке гасится.
По команде S,, от задатчика алгори- ма двигатшть 38 вращает кулачки 36 и 37, причем сначала кулачок 37 нажи- 15 мает на толкатель 33, которьй упирается в хвостовик 32 качающейся скобы 30, которая упорным винтом 29 нажимает, на подпятник 28 упора 27 вращающегося полулотка 20 и, Преодоле- i вая небольшой натяг прижимной пружины 24, открывает ковш 13 сбрасывает образец 2 вниз. При этом его масса уже измерена. Через малый отрезок времени кулачок 36 нажимает на тол- 25 катель 18, который упирается в хвостовик 17 механизма 12 отсекателя, ко-. торьш отклоняет пластину 16 и освобождает путь в ковш 13 для очередного образца 2.
30 После этого кулачки 36 и 37 продолжают разворачиваться дальше, толкатели 33 и 18 последовательно закрывают ковш 13, в который падает из промежуточного накопителя 11 очеред- JJ ной образец 2, а потом закрывают пластину 16, на которую поступает следующий образец 2, После попадания образца 2 в закрытый ковш 13 коромысло 14 отклоняется на угол ДС, в 0 результате чего флажок 43 перемещается относительно ПН 44 и в последнем возникает электрический сигнал iUg. Этот .сигнал поступает в усилитель 49, преобразуется и усиливается в виде 5 тока Ij,, с его выхода 48 поступает с одной стороны через безмоментные токовводы 47 в катушку 45 магнитоэлектрического компенсатора 46, производя электросиловые уравновешива- 0 ПИЯ коромысла 144С/- 0, а с другой
стороны - в опорный резистор 53, создавая в нем падение напряжения U,,
-f ТЖ-. U
Д оп сопротивление резистора 53.
5 Падение напряжение поступает в АЦП 54, преобразуется и в виде сиг- ншта S поступает в Д 56, где сравнивается с сигналом БЗ от ЗД, 55, заранее заданным оператором согласно
требуемым границам весовых групп до последней группы, свьпие ,(; где наибольшее значение массы в предпоследнем из весовых групп,
:Результат сравнения текущего сиг- натта S. с сигналом S, после Д 56 поступает в виде сигнала Sg- в ЛУ:57, которое формирует сигнал уп- раИения Sg на разворот электромото- pa 58 вместе с распределителем 59, который становится над нужным конце- накопителем 60, соответствующим тр|ебуемой весовой группе.
При следующем цикле срабатывания дв{игателя 38 по сигналу Sj от задат- 39 алгоритма кулачок 37 нажимает} па толкатель 33, последний сбрасы в4ет очередной измеренный образец 2 иУ ковша в остановившийся распреде- 59 и образец 2 оказывается в нужном накопителе 60, Ф;ормула изобретения
I Автоматические сортирующие весы, содержащие бункер, связанный с подаю
щим устройством, выходной лоток, установленный на основании, систему электросилового уравновешивания, включающую коромысло с ковшом и соединенную с задатчиком диапазонов, и концевые накопители, отличающиеся тем, что, с целью повышения точности, они снабжены уста- новленным между выходным лотком подающего устройства и ковшом коромысл промежуточным накопителем с механизмом отсекателя, осями, связанными с основанием, при этом ковш выполнен в виде двух соприкасающихся своими нижними частями полулоткор, один из которых является неподви:чнь М и связан с нагружающим концом коромысла, а другой установлен на осях с возможностью вращения и снабжен прижимной пружиной, связанной с неподвижным лотком, регуляторами безразличного положения и горизонтальной балансировки, а также узлом принудительног опрокидывания.
з;
.да
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для разделения живыхКОКОНОВ пО ВЕСу | 1979 |
|
SU822795A1 |
| УСТРОЙСТВО ДЛЯ РАСФАСОВКИ ПОРОШКОВЫХ ХИМИЧЕСКИХ ПРОДУКТОВ в ТАРУ | 1971 |
|
SU295717A1 |
| Автомат для клеймения крышек | 1980 |
|
SU912330A1 |
| Способ установки комплекта уплотнительных колец и устройство для его осуществления | 1990 |
|
SU1779524A1 |
| Автоматические весы | 1988 |
|
SU1578496A1 |
| Устройство для контроля,сортировки и подбора пар радиоэлементов | 1986 |
|
SU1466035A1 |
| Линия для расфасовки жидкостей в бочки | 1974 |
|
SU520326A1 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 1994 |
|
RU2118274C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
Изобретение относится к весоизмерительной технике, в частности к точным устройствам для сортировки по массе мелких предметов на весовые группы. Цель изобретения - повышение точности. В исходном положении при освобожденной прижимной пружине 24 с помощью регуляторов производится перемещение последних до тех пор, пока подвижный полулоток 20, вращающийся на осях, не займет "безразличного положения". После засыпки в загрузочный бункер 1 порции образцов 2 включается вибратор 6 вибролотка 4, образцы 2 поступают по нему к подхвату 9 манипулятора 8, который по сигналу от задатчика алгоритма подхватывает одиночный образец 2 и бросает его в выходной лоток 10, после чего образец 2 попадает в промежуточный накопитель 11 и задерживается пластиной 16 механизма отсекателя 12. Кулачок 36 нажимает на толкатель 18, который упирается в хвостовик 17 механизма отсекателя 12, отклоняет пластину 16 и освобождает путь в ковш 13 для очередного образца 2. После этого кулачки 36 и 37 разворачиваются и толкатели 33 и 18 последовательно закрывают ковш 13, в который падает образец 2, а потом закрывают пластину 16. После попадания образца 2 в ковш 13 коромысло 14 отклоняется на угол Δφ, в результате чего флажок 43 перемещается относительно преобразователя некомпенсации 44 и в последнем возникает электрический сигнал ΔVвх,который поступает в усилитель 49. Затем производится электросиловое уравновешивание коромысла 14. При срабатывании двигателя 38 по сигналу от задатчика алгоритма 39 кулачок 37 нажмет на толкатель 33, который сбросит измеренный образец 2 из ковша в остановившийся распределитель 59, затем образец 2 окажется в нужном накопителе 60.
| БЕСКОНТАКТНОЕ СОРТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU231156A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для СОРТИРОВКИ ПРЕДМЕТОВ по ВЕСУ | 0 |
|
SU368495A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| « | |||
