(Л
о
о со
Изобретение относится к машиностроению, а именно к робототехнике.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата деталей, расположенных в труднодоступных для схвата местах.
На чертеже изображен схват.
Схват состоит из корпуса 1, приводных рычагов 2 с захватными губками 3, гибкой ленты 4, концы которой закреплены на корпусе 1 с помощью винтов 5. На захватных губках 3 шарнирно установлены ролики 6, взаимодействующие с гибкой лентой 4.
Схват работает следующим образом.
В исходном положении схват подводится к детали таким образом, чтобы гибкая лента 4 охватывала деталь. При сведении приводных рычагов 2 ролики 6, взаимодействуя с гибкой лентой 4, смещают деталь в сторону зоны действия захватных губок 3. При этом гибкая лента 4 не обязательно должна смещать деталь до совпадения ее
центра с центром схвата, достаточно, чтобы центр детали переместился в зону действия захватных губок 3, а далее деталь сама при сведении губок перемещается по наклон- ным поверхностям губок к центру схвата. Освобождение детали происходит в обратной последовательности.
Формула изобретения
Схват, содержащий корпус, приводные рычаги с захватными губками и досыпа- тель деталей, выполненный в виде гибкой. ленты, отличающийся тем, что, с целью расширения технологических возможностей,
концы гибкой ленты жестко закреплены на корпусе схвата, а сама лента имеет возможность расположения между захватными рычагами, при этом на захватных губках щарнирно установлены дополнительно введенные ролики, имеющие возможность взаимодействия с гибкой лентой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват | 1986 |
|
SU1333576A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Адаптивный схват промышленного робота | 1985 |
|
SU1303403A1 |
Изобретение относится к машиностроению, а именно к робототехнике. Целью изобретения является расширение технологических возможностей за счет обеспечения захвата деталей, расположенных в труднодоступных для схвата местах. Схват состоит из корпуса 1 с приводными рычагами 2, на которых установлены захватные губки 3 с роликами 6. На корпусе 1 своими концами закреплена гибкая лента 4. При захвате деталей гибкая лента 4, взаимодействуя с роликами 6, перемеш.ает деталь в зону действия захватных губок 3. Дальнейшее центрирование детали происходит за счет призматических рабочих поверхностей захватных губок. 1 ил.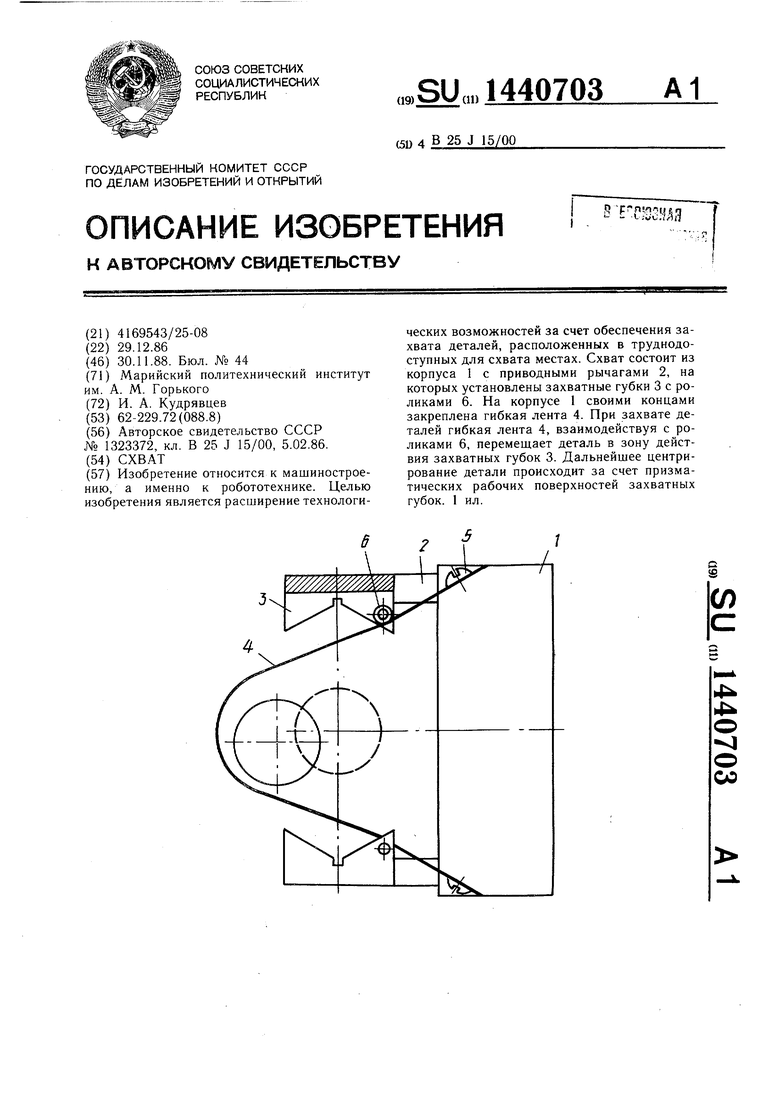
| Схват | 1986 |
|
SU1323372A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
