1
(21)44398Ш/25-08
(22)14.06.88
(46) 07.11.90. Бкш. № 41 (72) Ф.М.Сахаров, Н.В,Щивьев и И.П.Горбунов
(53)62-229.6 (088.8)
(56)Авторское свидетельство СССР № 1206049, кл. В 23 Q 7/02, 1984.
(54)РОТОРНЫЙ АВТОМАТ ПИТАНИЯ
(57)Изобретение относится к области станкостроения, конкретно к устройствам автоматической загрузки технологических роторных машин штучными легкоповреждаемыми со смещенным центром тяжести деталями типа тел вращения сложной конфигурации. Цель изобретения - повьшение надежности работы автомата. Вал 7 смонтирован на основании 1 с возможностью вращения. Бункер 8 закреплен на валу 7 и имеет равномерно расположенные по его периферии захватные органы 9. Выталкива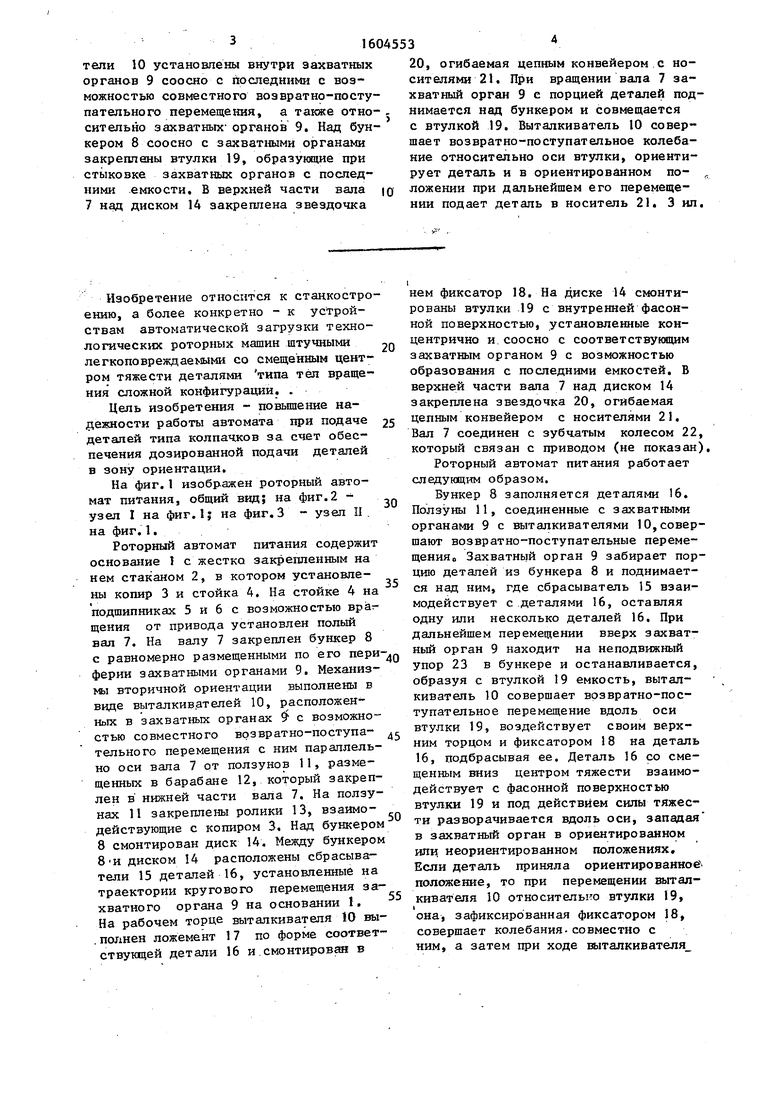
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Загрузочный ротор | 1988 |
|
SU1593904A1 |
| Загрузочный ротор | 1990 |
|
SU1745508A1 |
| АВТОМАТ ПИТАНИЯ ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ | 1970 |
|
SU286467A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
| Роторный автомат питания | 1987 |
|
SU1491653A1 |
| Роторный автомат питания | 1979 |
|
SU870063A1 |
| Роторный автомат питания | 1987 |
|
SU1754408A1 |
| Транспортный ротор | 1986 |
|
SU1430226A1 |
Изобретение относится к области станкостроения, конкретно к устройствам автоматической загрузки технологических роторных машин штучными легкоповреждаемыми со смещенным центром тяжести деталями типа тел вращения сложной конфигурации. Цель изобретения - повышение надежности работы автомата. Вал 7 смонтирован на основании 1 с возможностью вращения. Бункер 8 закреплен на валу 7 и имеет равномерно расположенные по его периферии захватные органы 9. Выталкиватели 10 установлены внутри захватных органов 9 соосно с последними с возможностью совместного возвратно-поступательного перемещения, а также относительно захватных органов 9. Над бункером 8 соосно с захватными органами закреплены втулки 19, образующие при стыковке захватных органов с последними емкости. В верхней части вала 7 над диском 14 закреплена звездочка 20, огибаемая цепным конвейером с носителями 21. При вращении вала 7 захватный орган 9 с порцией деталей поднимается над бункером и совмещается со втулкой 19. Выталкиватель 10 совершает возвратно-поступательное колебание относительно оси втулки, ориентирует деталь и в ориентированном положении при дальнейшем его перемещении подает деталь в носитель 21. 3 ил.
гз
(Л
О5
сд
СП
00
Фиг1
тели 10 установлены внутри захватных органов 9 соосно с йоследннми с возможностью совместного возвратно-поступательно го перемещения, а также отно- сительно захватных органов 9. Над бункером 8 соосно с захватными органами закреплены втулки 19, образующие при стыковке захватных органов с последними емкости, В верхней части вала 7 над диском 14 закреплена звездочка
Изобретение относится к станкостроению, а более конкретно - к устройствам автоматической загрузки технологических роторных машин штучными легкоповреждаемыми со смещенным центром тяжести деталями типа тел вращения сложной конфигурации. .
Цель изобретения - повышение надежности работы автомата при подаче деталей типа колпачков за счет обеспечения дозированной подачи деталей в зону ориентации.
На фиг.1 изображен роторный автомат питания, общий вид; на фиг.2 - узел 1 на фиг. Ij иа фиГ.З - узел II. на фиг.1.
Роторный автомат питания содержит основание 1 с жестко закрепленным на нем стаканом 2, в котором установлены копир 3 и стойка 4. На стойке 4 на подшипниках 5 и 6 с возможностью вращения от привода установлен полый вал 7. На валу 7 закреплен бункер 8 с равномерно размещенными по его пери ферии захватными органами 9. Механизмы вторичной ориентации выполнены в виде выталкивателей 10, расположен HDIX в захватньпс органах с возможностью совместного возвратно-поступа- тельного перемещения с ним параллельно оси вала 7 рт ползунов 11, размещенных в барабане 12, который закреплен в нижней части вала 7. На ползунах И закреплены ролики 13, взаимо- действующие с копиром 3. Над бункером 8 смонтирован диск 14. Между бункером 8 И диском 14 расположены сбрасыватели 15 деталей 16, установленные на траектории кругового перемещения за хватного органа 9 на основании 1. На рабочем торце выталкивателя 10 вы .полнен ложемент 17 по форме соответ ствукщей детали 16 и.смонтирован в
20, огибаемая цепным конвейером с носителями 21. При вращении вала 7 захватный орган 9 с порцией деталей поднимается над бункером и совмещается с втулкой 19. Выталкиватель Ю совершает возвратно-поступательное колебание относительно оси втулки, ориентирует деталь и в ориентированном по- ложении при дальнейшем его перемещении подает деталь в носитель 21. 3 ил
Q
5
5
0
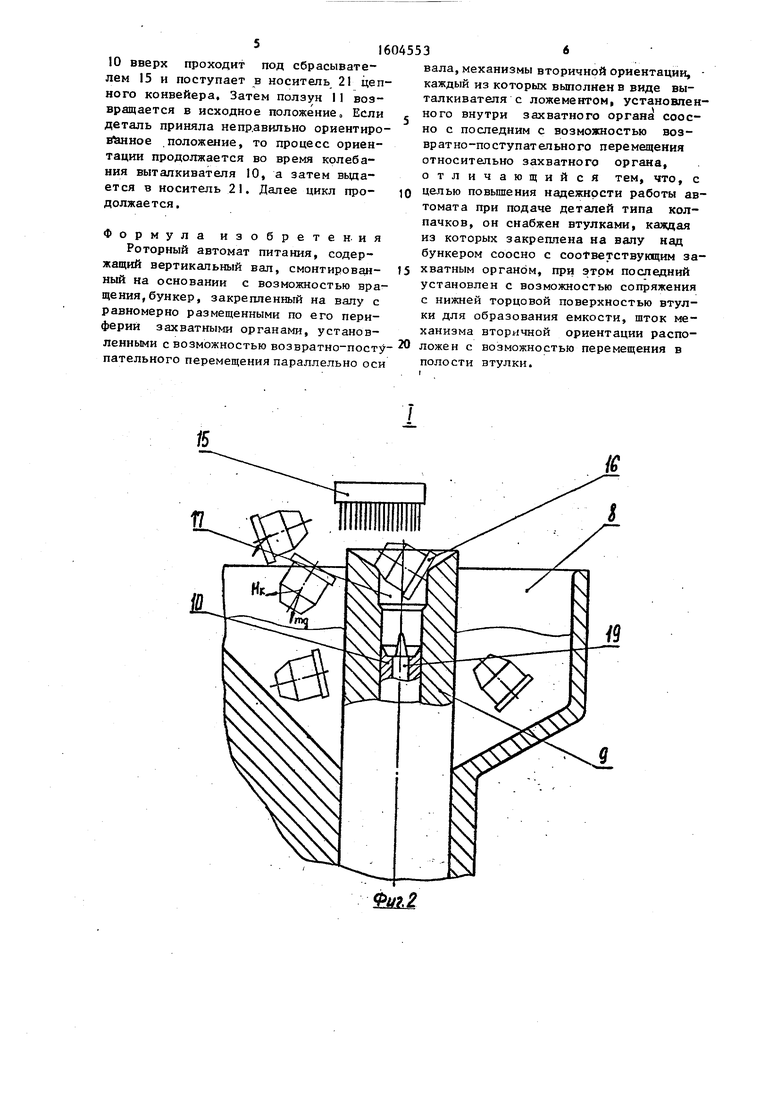
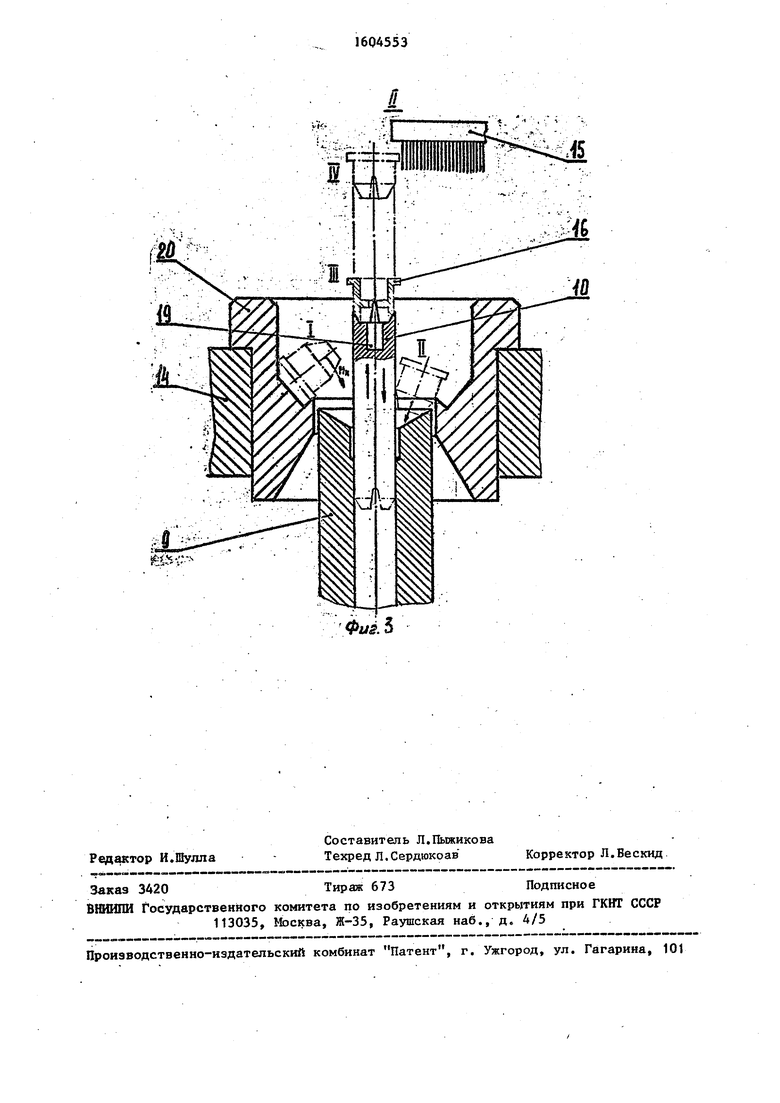
нем фиксатор 18. На диске 14 смонтированы втулки 19 с внутренней фасонной поверхностью, установленные кон- центрично и соосно с соответствующим захватным органом 9 с возможностью образования с последними емкостей. В верхней части вала 7 над диском 14 закреплена звездочка 20, огибаемая цепным конвейером с носителями 21. Вал 7 соединен с зубчатым колесом 22, который связан с приводом (не показан).
Роторный автомат питания работает следующим образом.
Бункер 8 заполняется деталями 16. Ползуны 11, соединенные с захватными органами 9 с выталкивателями 10,совершают возвратно-поступательные перемещения Захватный орган 9 забирает порцию деталей из бункера 8 и поднимается над ним, где сбрасыватель 15 взаимодействует с .деталями 16, оставляя одну или несколько деталей 16. При дальнейшем перемещении вверх захватный орган 9 находит на неподвижный упор 23 в бункере и останавливается, образуя с втулкой 19 емкость, выталкиватель 10 совершает возвратно-поступательное перемещение вдоль оси втулки 19, воздействует своим верхним торцом и фиксатором 18 на деталь 16, подбрасывая ее. Деталь 16 со смещенным вниз центром тяжести взаимодействует с фасонной поверхностью втулки 19 и под действием силы тяжести разворачивается вдоль оси, западая в захватный орган в ориентированном илц неориентированном положениях. Если деталь приняла ориентированное положение, то при перемещении выталкивателя 10 относительно втулки 19, она, зафиксированная фиксатором 18, совершает колебания-совместно с ним, а затем при ходе выталкивателя
10 вверх гфоходит под сбрасывателем 15 и поступает в носитель 21 цепного конвейера. Затем ползун I1 возвращается в исходное положение о Если деталь приняла неправильно ориентиро- .положение, то процесс ориентации продолжается во время колебания выталкивателя 10, а затем вьща- ется в носитель 21. Далее цикл продолжается.
Формула изобретения
Роторный автомат питания, содержащий вертикальный вап, смонтированный на основании с возможностью вращения, бункер, закрепленный на валу с равномерно размещенными по его периферий захватными органами, установ1604553
вала, механизмы вторичной ориентации каждый из которых выполнен в виде вы талкивателя с ложементом, установл ного внутри захватного органа сос но с последним с возможностью воз вратно-поступательного перемещения относительно захватного органа, отличающийся тем, что,
0 це.пью повышения надежности работы томата при подаче деталей типа ко пачков, он снабжен втулками, кажда из которых закреплена на валу над бункером соосно с cootBeTCTByKmHM
J5 хватным органом, при этом последни установлен с возможностью сопряжен с нижней торцовой поверхностью втул ки для образования емкости, шток м ханизма вторичной ориентации расп
J - л jj-v..ij.ji-ji b -1п ft, 4 ИСП i dUrlrl if jj ji
ленными с возможностью возвратно-посту-20 ложен с возможностью перемещения в нательного перемещения параллельно осиполости втулки.
1604553
вала, механизмы вторичной ориентации, - каждый из которых выполнен в виде выталкивателя с ложементом, установленного внутри захватного органа сосс- но с последним с возможностью возвратно-поступательного перемещения относительно захватного органа, отличающийся тем, что, с
це.пью повышения надежности работы автомата при подаче деталей типа колпачков, он снабжен втулками, каждая из которых закреплена на валу над бункером соосно с cootBeTCTByKmHM захватным органом, при этом последний установлен с возможностью сопряжения с нижней торцовой поверхностью втулки для образования емкости, шток механизма вторичной ориентации распо-v..ij.ji-ji b -1п ft, 4 ИСП i dUrlrl if jj ji
ложен с возможностью перемещения в полости втулки.
{С
$и
Фas.
is
