Известны автоматы питания для поштучной выдачи изделий, преимущественно для роторных и роторно-цепных машин, на вертикальном Валу которых смонтированы бункер с равномерно расположенными по окружности воронками и ползуны с рабочими опгянами, выполненными в виде подвижных заборных и неподвижных приемных трубок. В известных автоматах изделия перемещаются в трубках благодаря собственному весу, что приводит к зависанию их и снижению надежности работы автомата.
Предложенный автомат отличается от известных тем, что рабочие органы его выполнены в виде захватов, состоящих из нескольких подвижных соосно расположенных звеньев, одно ИЗ которых является выталкивателем. Воронки бункера снабжены ориентаторами с наклонными пазами, имеющими возмол ность совершать независимое возвратно-поступательное движение.
Указанные отличия позволяют повысить надежность работы предложенного автомата.
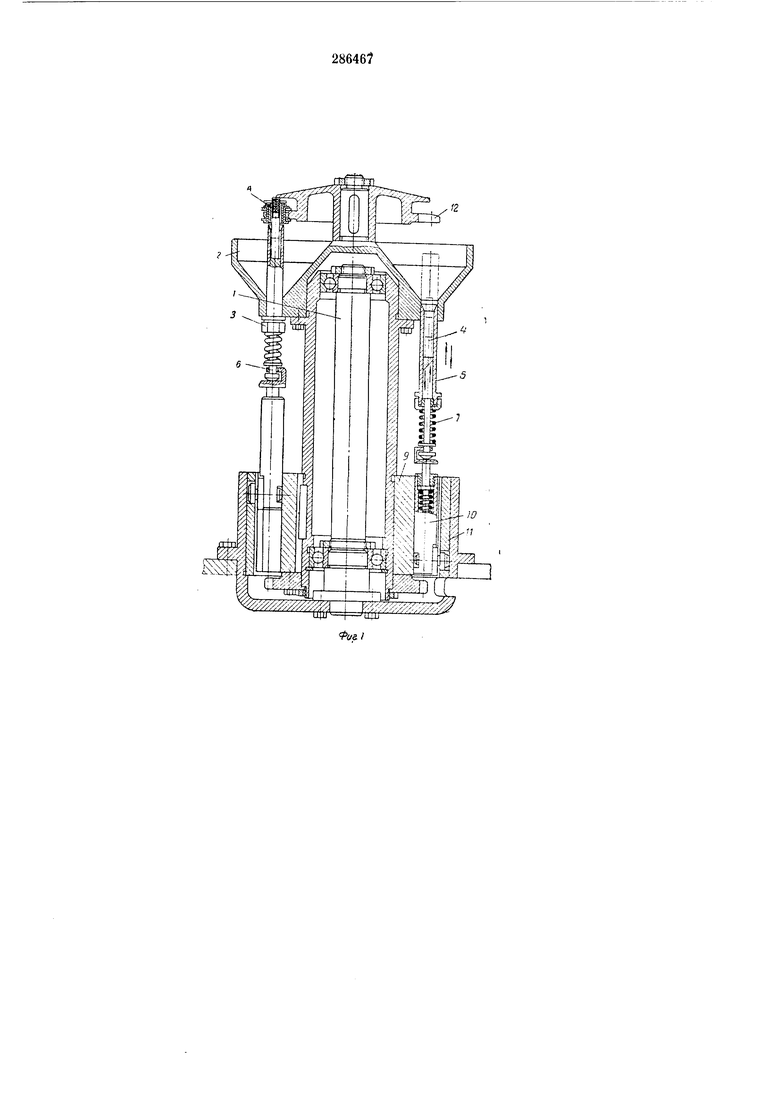
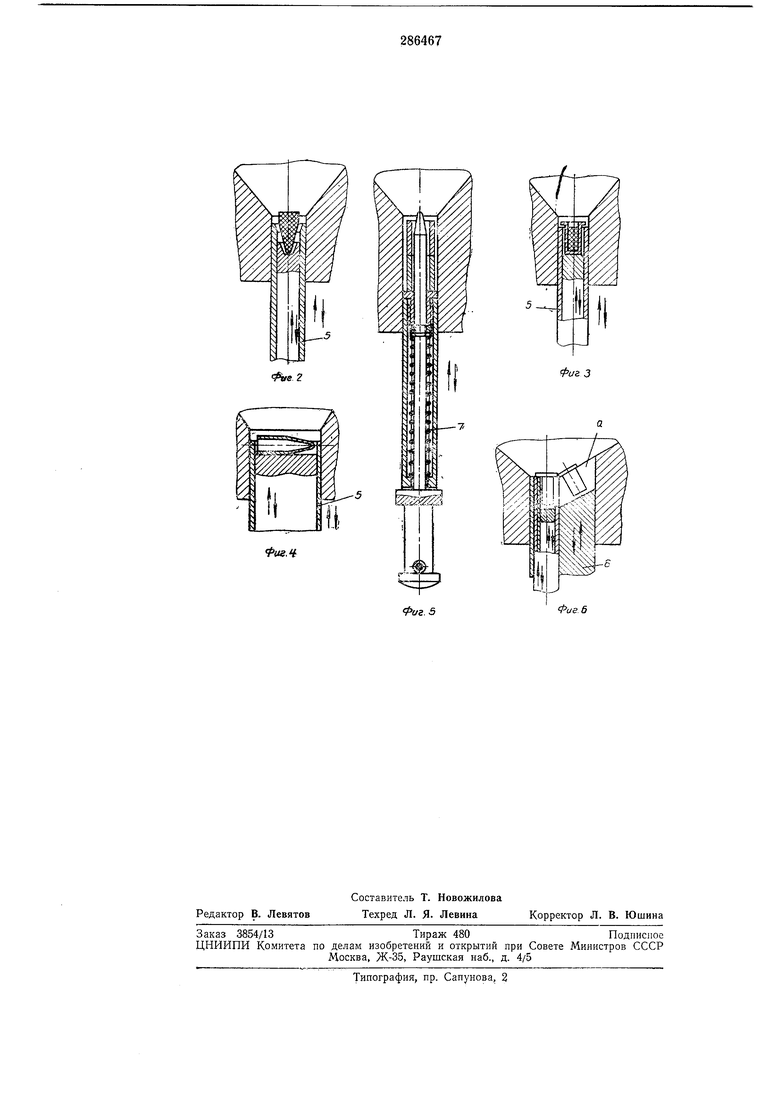
На фиг. I изображена принципиальная схема роторного автомата питания; на фиг. 2- 5 - конструктивные варианты исполнения рабочих органов для захвата деталей различной конфигурации; на фиг. 6 - схема воронки бункера, снабженной ориентатором.
Предложенный автомат включает в себя укрепленный на вращающемся валу / бункер 2 с равномерно расположенными по окружности воронками, рабочие органы 3 с захватными устройствами 4 для забираемых из бункера 2 изделий, имеющие корпус 5, выталкиватель 6, фиксирующую выталкиватель пружину 7, ориентаторы 8, имеющие возможность совершать (см. фиг. 6) независимое возвратнопоступательное движение; барабан 9 с ползунами 10, получающими возвратно-поступательное движение от неподвижного копира //, звездочку 12, закрепленную на валу над бункером 2 автомата.
Работает предлагаемый автомат следующем образом.
При вращении роторного автомата питания управляющие ползуны 10, перемещающиеся в пазах барабана 9 вследствие взаимодействия с неподвижным копиром //, сообщают рабочим органам 3 незначительное возвратно-поступательное движение, в процессе которого самозаклинивающиеся изделия тииа острых конусов и цилиндрических стаканов с острым КОНУСОМ, находяидиеся в бункере 2 автомата, забираются захватнылш устройствами 4 (например, карманами) в ориентированном или недоориснтированном виде в количестве двухтрех изделий или пощтучно.
В случае, если воронки бункера снабжены ориентаторами 5 с наклонным пазом а (см. фиг. 6), имеющими возможность совершать независимое движение (например, от своих уиравляющих ползунов с неиодвижным копиром), то в процессе возвратно-поступательного движения ориентатора 8 совместно с рабочим органом 5 изделие западает в наклонный паз а, ориентируется при помощи .фланца или благодаря ярко выралсенному смещению центра тяжести и перемещается по наклонному пазу в карман захватного устройства.
В конце рабочего цикла автомата рабочие органы 3 перемещаются управляющими ползунами 10 в зону поштучной выдачи изделий, расположенную над бункером 2, при этом корпус 5 рабочего органа 3 находит на жесткий упор в бункере 2 автомата и останавливается, а выталкиватель 6, сжимая фиксирующую пружину 7, продолжает движение и принудительно выдает одно изделие в приемное гнездо А транспортирующего или ориентирующего устройства, после чего рабочий орган возвращается в исходное положение, и цикл по захвату и принудительной выдаче одного изделия из бункера автомата снова повторяется со следующим оборотом роторного автомата питания.
Изделия, иопавщие в гнезда транспортирующего устройства, например цепного транспортера, охватывающего звездочку 12 автомата
питания, переносятся к рабочим механизмам, выполняющим технологическуЕО обработку изделий. Неориентированные изделия передаются рабочими органами в расположенные над бункером 2 ориентирующие устройства, в которых осуществляется ориентация изделий любым известным способом. После ориентации изделия принудительно выталкиваются из ориентатора в транспортирующее устройство, переносящее их к механизмам, выполняющим технологические операции.
Предмет изобретения
1.Автомат питания для поштучной выдачи изделий, преимущественно для роторных и роторно-цепных мащин, содержащий вертикальный вал, на котором смонтированы бункер с равномерно распололсенными по окружности воронками и ползуны с рабочими органами,
отличающийся тем, что, с целью повыщения надежности пощтучной принудительной передачи изделий из бункера, рабочие органы выполнены в виде захватов, состоящих из нескольких подвил ных соосно расположенных
звеньев, одно из которых является выталкивателем.
2.Автомат по п. 1, отличающийся тем, что воронки бункера снабл-:ены ориентаторами с наклонными пазами, имеющими возможность
соверщать независимое возвратно-поступательное движение.
2
Риг Л
Фиг 6
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1979 |
|
SU870063A1 |
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Загрузочный ротор | 1990 |
|
SU1745508A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Механизм захвата и поштучной выдачи изделий | 1981 |
|
SU996167A2 |
| Роторный автомат питания | 1978 |
|
SU779010A1 |
| Роторный автомат питания | 1982 |
|
SU1077756A2 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Ротор загрузки роторно-конвейерных машин | 1983 |
|
SU1199405A1 |
| Роторный автомат питания | 1987 |
|
SU1530407A1 |