Физ. I
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1986 |
|
SU1395477A2 |
| Установка для бурения радиальных скважин из вертикальной выработки, буровой станок, механизм вращения и подачи | 1987 |
|
SU1737094A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| Машина для сварки трением | 1986 |
|
SU1400826A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| Промышленный робот | 1979 |
|
SU770785A1 |
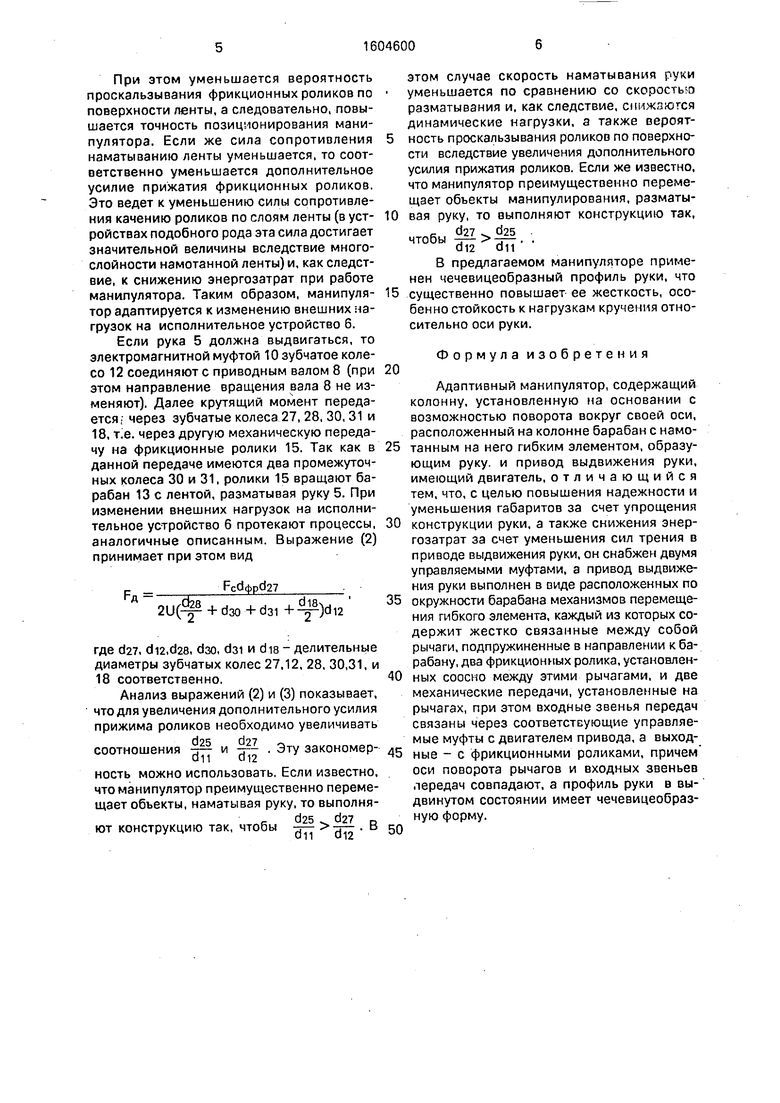
Изобретение относится к машиностроению, а именно к манипуляторам, и может быть использовано при манипулировании объектами в условиях длинных узких технологических проходов. Целью изобретения является повышение надежности и уменьшение габаритов за счет упрощения конструкции руки, а также снижение энергозатрат за счет уменьшения сопротивления качению в приводе выдвижения руки. Адаптивный манипулятор содержит основание 1, на котором установлена поворотная колонна 2. На колонне установлен корпус 4 механизма 5 выдвижения руки манипулятора. Профиль руки имеет чечевицеобразную форму. Механизм выдвижения руки манипулятора выполнен в виде фрикционных роликов, установленных на подвесных рычагах по окружности барабана. Привод каждого ролика выполнен в виде двух независимых механических передач, передача крутящего момента которыми противоположна по направлению, при этом оси рычагов и входных звеньев передач совпадают, что автоматически обеспечивает увеличение прижатия роликов при повышении сопротивления перемещению руки. 7 ил.
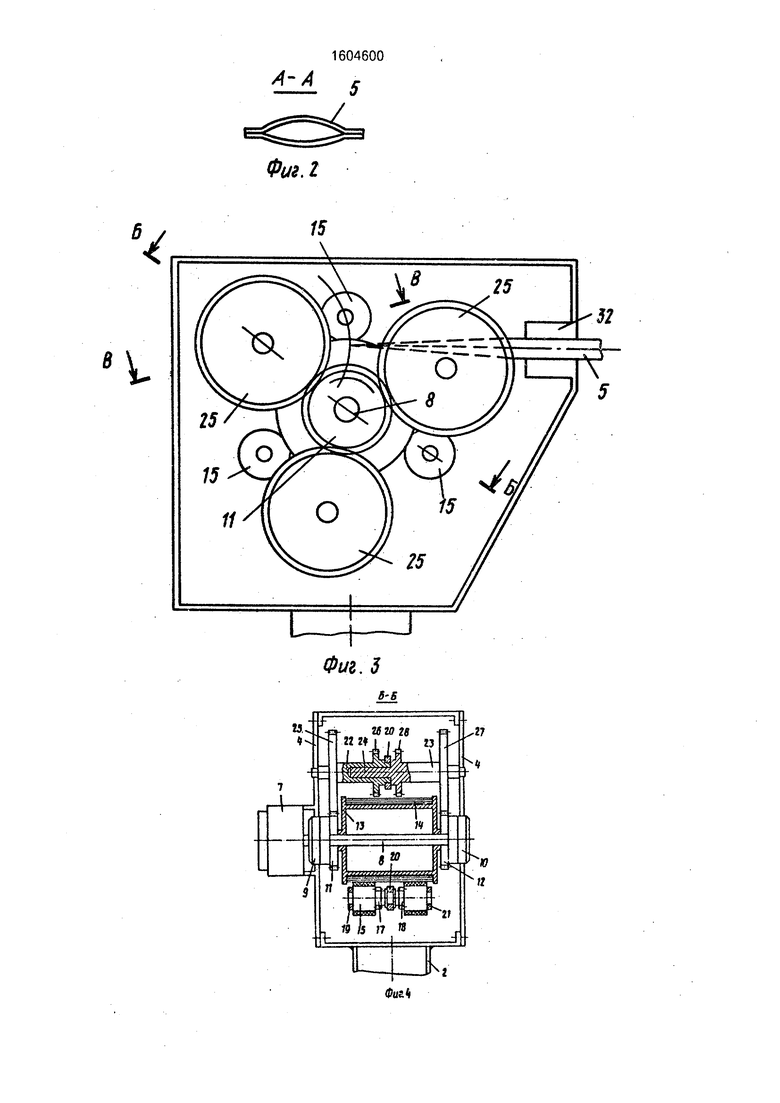
Фиг. 5
М,
27
15
ч
;9 25 го 8
гг
/$
л. f, ч J
16 Т7 8 18 75 Фие.5
25
Г7:18
Фиг.6
f
TtHii
L Jt
№1
ад
X
7
