1
Изобретение относится к области автоматизации погрузочно-разгрузочных работ и предназначено для использования при штабелировании изделий.
Известен промьтшенный робот, со- 5 держаций основание, размещенную на основании колонку с ползуном, в направляющих которого установлена с возможностью перемещения рука, снабженная 1сареткой с приводом и захва- 10 том 1 .
Однако для продольно-поперечного движения руки в работе используются, как минимум, два программно управ- j ляемых приво.ца и соответствующая позиционная система управления этими приводами, что усложняет конструкцию.
Целью изобретения является упро- 20 щение конструкции.
Цель достигается тем, что робот снабжен параллелограммным механизмом, кривошипом и упором, захват связан с кареткой посредством это- 25 го параллелограммного механизма, одно из плеч которого подпружинено, а другое плечо посредством -криво1иип-1 с приводом каретки, причем vrsnp расположен на руке.
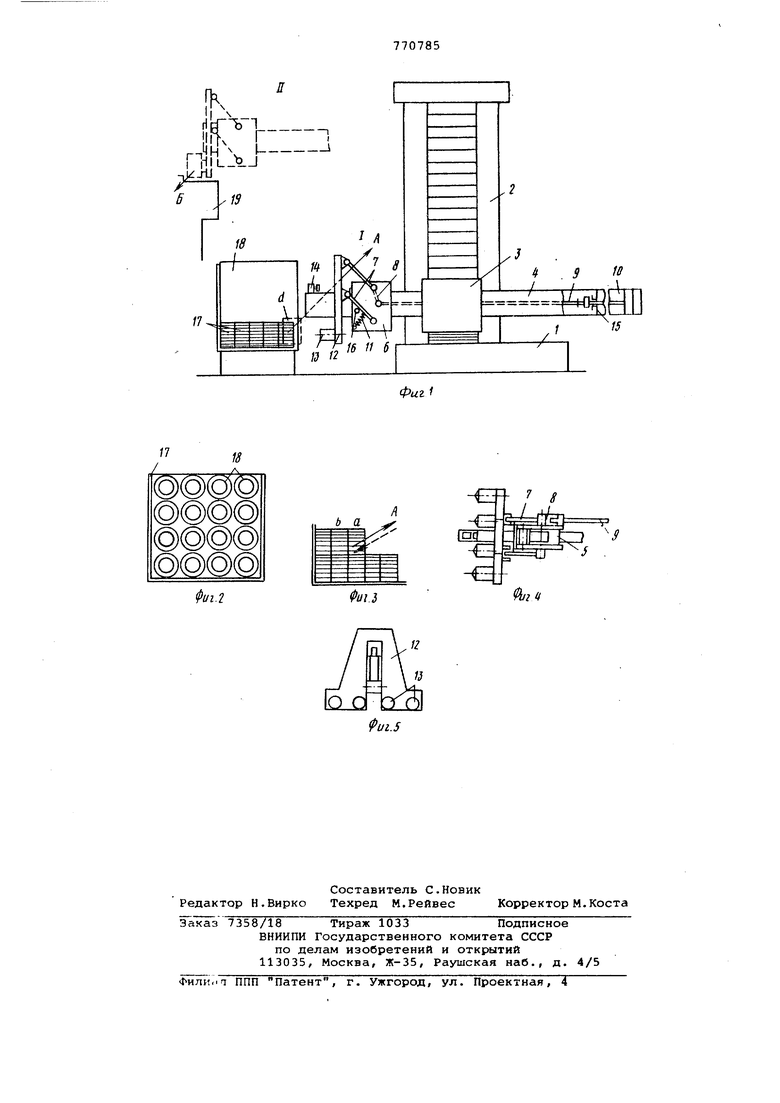
На фиг. 1 показана общая «-хома автоматического манипулятора; на фиг. 2 - контейнер с.уложенными изделиями; на фиг. 3 показано направление перемещения ряд изделий в зоне контейнера; на фиг. 4 - каретка с захватом, вид сверху; на фиг.5захват, вид спереди.
Предлагаемый робот содержит основание 1, поворотную колонну 2, вертикально подвижный ползун 3, несущий горизонтально подвижную руку 4. На руке 4 подвижно посредством роликов 5 установлена каретка 6, с которой шарнирно соединены рычаги 7, образующие параллелограммный механизм. Имеется кривошип 8, жестко соединенный с одним из 7 и шарнирно со штоком 9 пневмопривода 10. На каретке 6 одним концом укреплена пружина 11. Другой ее конец прикреплен к одному из рычагов 7. Концы рычагов 7 шарн-ирно укреплены на корпусе. 12 захвата с захватываиощими головками 13. На руке 4 имеется упор 14, ограничивающий перемещение каретки относительно руки 4, упор 15, ограничивающий ход штока цилиндра, и упор 16, ограничивающий поворот рычагов 7. Изделия
17 подаются в контейнер 18 либо извлекаются из него и передаются руко робота на транспортер 19.
Работу робота рассмотрим на примере выгрузки изделий из контейнера 18 и загрузки ими транспортера 19. Рука 4 робота посредством приводов с циклевой системой программног управления выводится в положение | , при котором головки 13 захвата располагаются вблизи изделий 17, находящихся в контейнере, и соосно с ними. После этого привод 10 посредством штока 9 воздействует на кривошип 8. Кривошип 8 стрегштся повернуть рычаги 7, но этому препятствует пружина 11. В то же время шток 9 толкает через кривошип 8 каретку 6, которой ничто не мешает перемещаться по руке 4. Вместе с кареткой б перемещается корпус 12 захвата, захватные головки 13 которого с зазором входят в отверстия изделий. В конце своего пути каретка 6 упирается в упор 14 и останавливается. Привод 10 через шток 9 продолжает толкать кривошип 8. Так как каретка остановлена упором 14, под воздействием привода 10 начинает поворачиваться кривошип 8, ас ним и рычаги, преодолевая сопротивление пружины 11. В результате корп 12 и головка 13 с изделиями совершают плоскопараллельное движение по направлению стрелки А, т.е. требуемое, продольно-поперечное перемещение. В конце хода привода 10 выгружаемый ряд занимает взвешенное положение d. После этого включается привод подъема, а затем привод выдвижения руки, которая приходит в положение . Привод 10 совершает обратное движение, т.е. тянет кривошип 8 посредством штока 9. Так как пружина 11 растянута и стремится вращать рычаги 7 в ту же сторону, что и шток 9, в начальный момент работы привода 10 поворачиваются кривошип 8 и рычаги 7. Корпус 12 с головками 13 и находящимися на них изделиями совершает диагональное перемещение в направлении стрелки Б. Изделия устанавливаются на транспортер 19, головки 13, пройдя еще
некоторый путь внутри остановипшихся на транспортере изделий, также останавливаются. При этом междду головками 13 и внутренней поверхностью изделий образовывается круговой зазор, нижний рычаг 7 останавливается на упоре 16. При дальнейшем движении штока 9 каретка б перемещается по руке в направлении назад, головки 13 выводятся из изделий, находящихся на транспортере 19, В конце хода привод 10 останавливаетс на упоре 16. После этого посредство приводов горизонтального и вертикалного перемещения рука переводится в положение , соответствующее захвату следующего ряда изделий из контейнера. В дальнейшем цикл повторяется .
Робот может работать в режиме рагрузки транспортера 19 и загрузки контейнера, в этом случае исходным положением руки 4 является положени li , а конечным - положение . Порядок работы робота остается прежним. Выгрузка изделий из контейнера начинается с верхнего слоя, а каждый слой - с ближайшего к манипулятору ряда. Загрузка контейнера производится в обратном порядке.
Формула изобретения Промышленный робот, содержащий основание, размещенную на основании колонну с ползуном, в направляющих которого установлена с возтможностью перемещения рука, снабженная кареткой с приводом и с захватом, отличающийся тем, что, с целью упрощения конструкции, он снабжен параллелограммным механизмом, кривошипом и упором, захват связан с кареткой посредством этого параллелограммного механизма, одно из плеч которого подпружинено, а другое плечо посредством кривошипа связано с приводом карот :и, причем упо расположен на руке.
Источники информации, принятые во внимание при экспертизе
1. Новые направления совершенствования промышленных роботов. М., НИИмаш. Серия С-1, 1975, с. 60-61.
17
W /ч
Фиг.2
Фиг.г
12
13

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Устройство для загрузки контейнеров изделиями | 1988 |
|
SU1544644A1 |
| Устройство для отбора металло-КОРдНыХ зАгОТОВОК C диАгОНАльНО- РЕзАТЕльНОй МАшиНы | 1979 |
|
SU846295A2 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Автоматизированный комплекс горячей штамповки | 1988 |
|
SU1602602A1 |
| Станок для шлифования деталей | 1987 |
|
SU1713426A3 |
| Схват | 1985 |
|
SU1289679A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ИЗДЕЛИЙ С КОНВЕЙЕРА И ИХ УКЛАДКИ В ТАРУ | 2014 |
|
RU2549319C1 |