ные колеса 23 и 24 связано с колесами 25 н 26, нарезанными на валах 3 и 27.
Прнвод захвата манипулятора работает следующим образом.
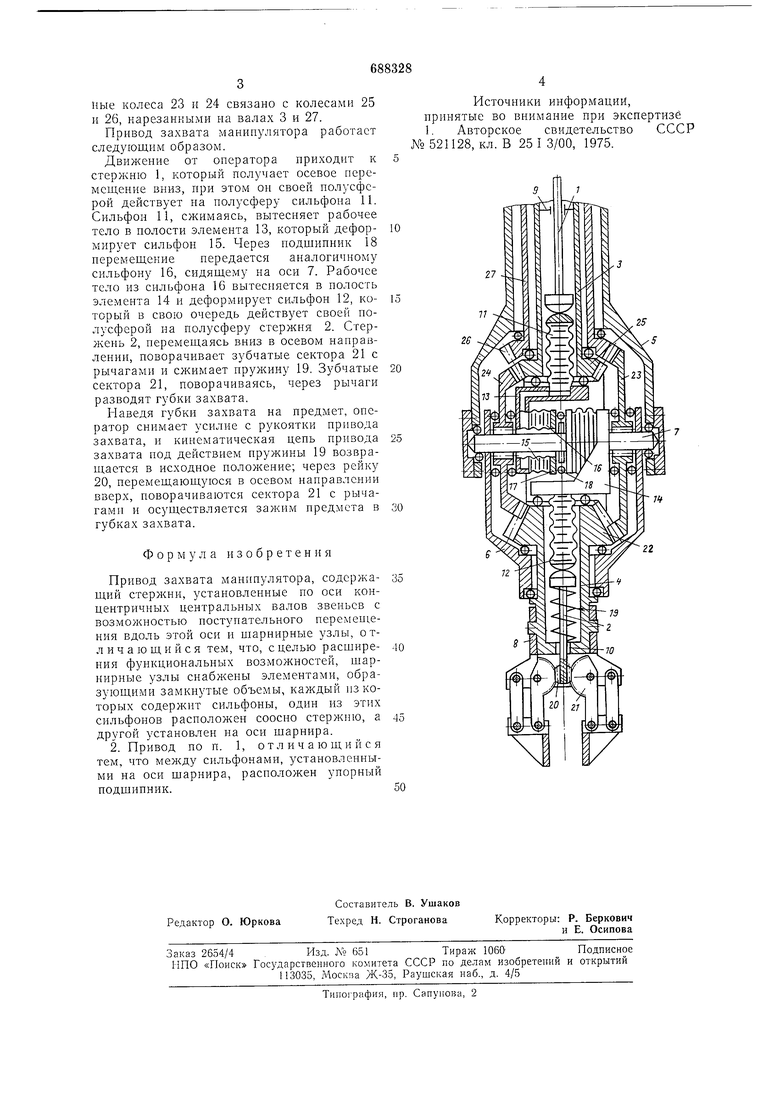
Движение от оиератора нриходит к стержню 1, который получает осевое перемещение вниз, при этом он своей полусферой действует на полусферу сильфона 11. Сильфон 11, сжимаясь, вытесняет рабочее тело в нолости элемента 13, который деформирует СИЛЬФОН 15. Через подшипник 18 неремещение передается аналогичному сильфону 16, сидящему на оси 7. Рабочее тело из сильфона 16 вытесняется в полость элемента 14 и деформирует сильфон 12, который в свою очередь действует своей полусферой на полусферу стержня 2. Стержень 2, перемещаясь вниз в осевом направлении, поворачивает зубчатые сектора 21 с рычагами и сжимает пружину 19. Зубчатые сектора 21, поворачиваясь, через рычаги разводят губки захвата.
Наведя губки захвата на предмет, оператор снимает усилие с рукоятки привода захвата, и кинематическая цепь привода захвата под действием пружины 19 возвращается в исходное положение; через рейку 20, перемещающуюся в осевом направлении вверх, поворачиваются сектора 21 с рычагами и осуществляется зажим предмета в губках захвата.
Формула изобретения
Привод захвата манипулятора, содержащий стержни, установленные по оси концентричных центральных валов звеньев с возможностью поступательного перемеп1,ения вдоль этой оси и шарнирные узлы, отличающийся тем, что, с целью расширения фуикциональных возможностей, шарнирные узлы снабжены элементами, образующими замкнутые объемы, каждый из которых содержит сильфоны, один из этих сильфонов расположен соосно стержню, а другой установлен на оси шарнира.
2. Привод по п. 1, отличающийся тем, что между сильфонами, установленными на оси шарнира, расположен упорный подщипник.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 521128, кл. В 25 i 3/00, 1975.
К
- 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Трехосный станок с ленточной пилой | 1932 |
|
SU33270A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
