25

| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм с остановками | 1985 |
|
SU1234691A1 |
| Устройство для перегрузки деталей | 1989 |
|
SU1710277A1 |
| Промышленный робот | 1983 |
|
SU1119837A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Устройство для перемещения деталей от пресса | 1986 |
|
SU1388161A1 |
| Устройство для тренировки мышц | 1990 |
|
SU1789242A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2245781C1 |
| Магазин-накопитель | 1986 |
|
SU1404262A1 |
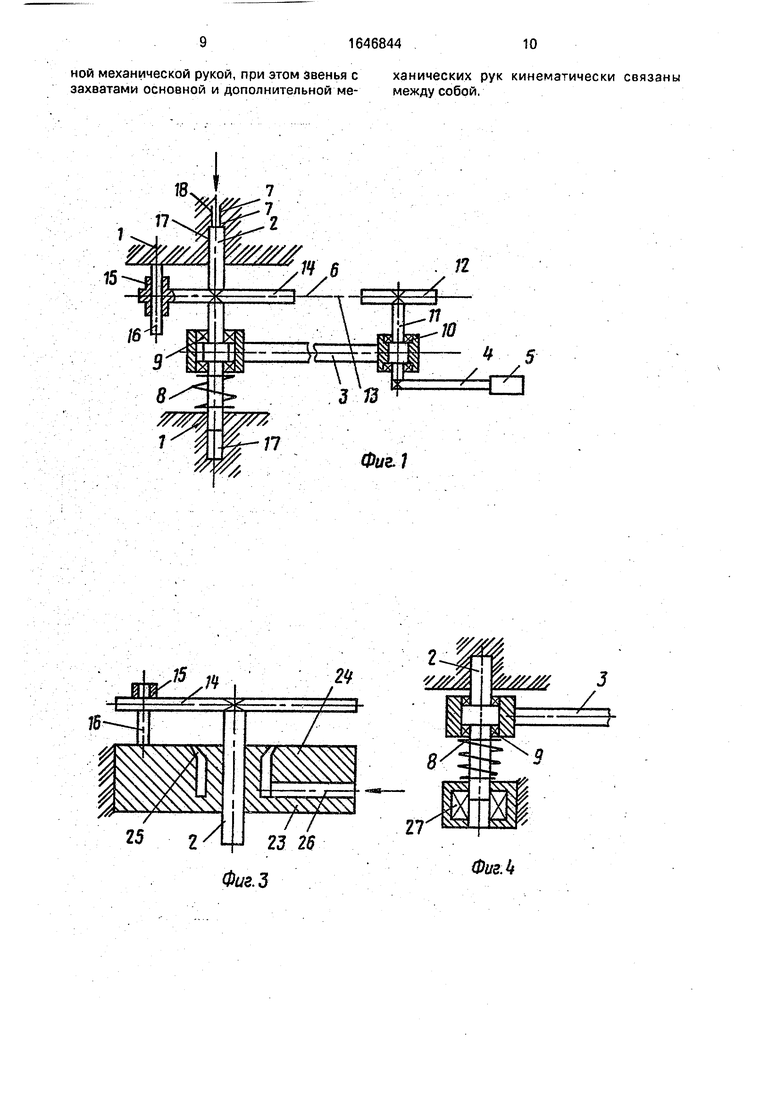
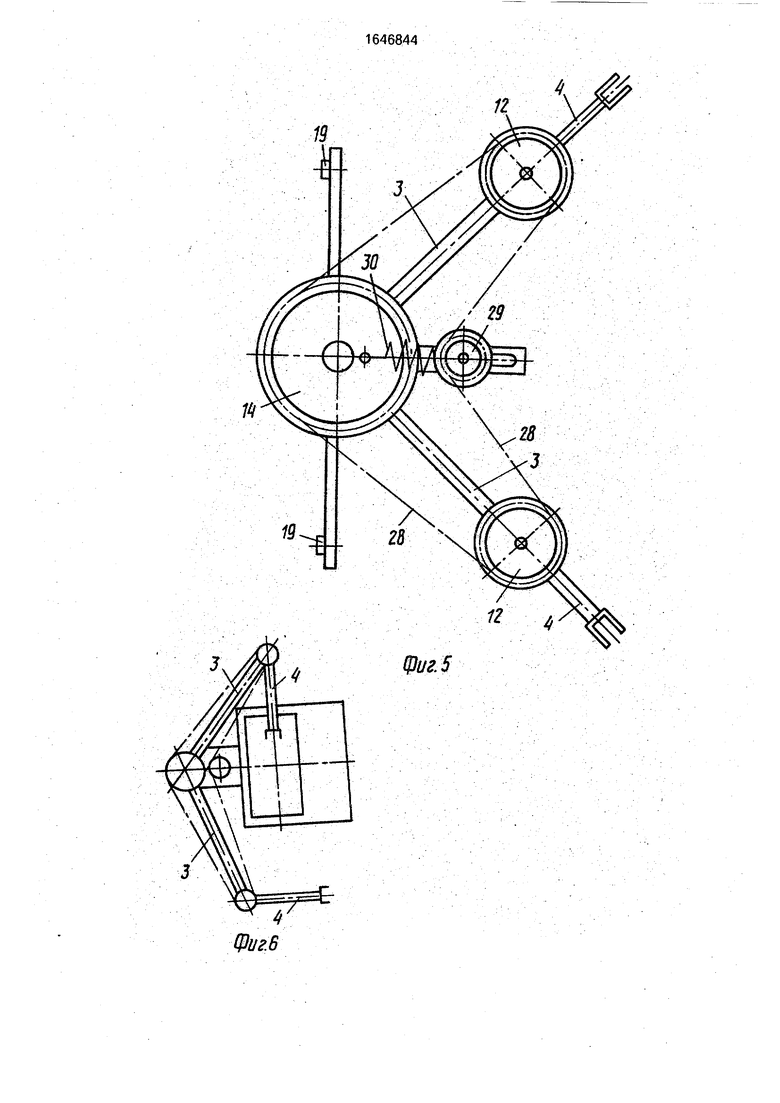

Изобретение относится к станкостроению и может быть использовано в качестве манипулятора для захвата и перемещения предметов. Цель - повышение производительности путем сокращения числа подвижных и трущихся частей. На основании 1 с возможностью вертикального перемещения установлен ползун 2, на котором шар- нирно закреплена механическая рука 3. На конце последней шарнирно закреплено звено 4 с захватом 5. Кинематическая связь, состоящая из звездочек 12 и 14 и цепного контура 13, соединяет основание 1 со звеном 4. Упоры-фиксаторы 19 крайних положений руки 3 выполнены в виде пневмоструйных схватов. От приводов ползун 2 перемещается вниз. Аккумуляторы 22 разгоняют руку 3 при ее перемещении из одного крайнего положения в другое, а упоры-фиксаторы восполняют потери энергии, притягивая руку 3 при ее подходе к другому крайнему положению, 2 з.п.ф-лы, 9 ил.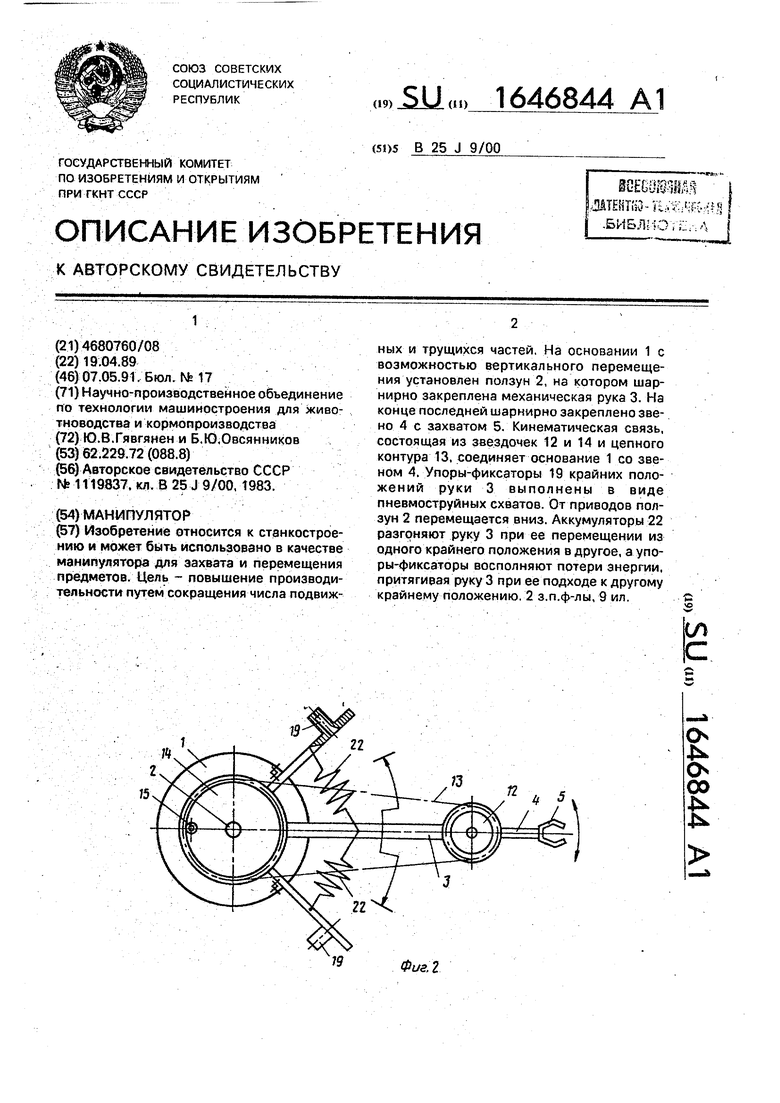
Фиг.З
Фиг.Ь
$MfU
4fe
0
Ы
Ъ№Ш1
35
v
«S
Я.
ч
У//ЛУ//.
I
я
X
УХ/
2
/
Щи г. В
2
38
Фиг. 9
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
