Изобретение относится к обработке металлов давлением, в частности к гибочным штампам для изготовления изделий типа «петля из листовых заготовок.
Цель изобретения - улучшение условий труда и обеспечение его безопасности путем механизированного вывода держателя из рабочей зоны штампа для установки заготовки и снятия готовой детали.
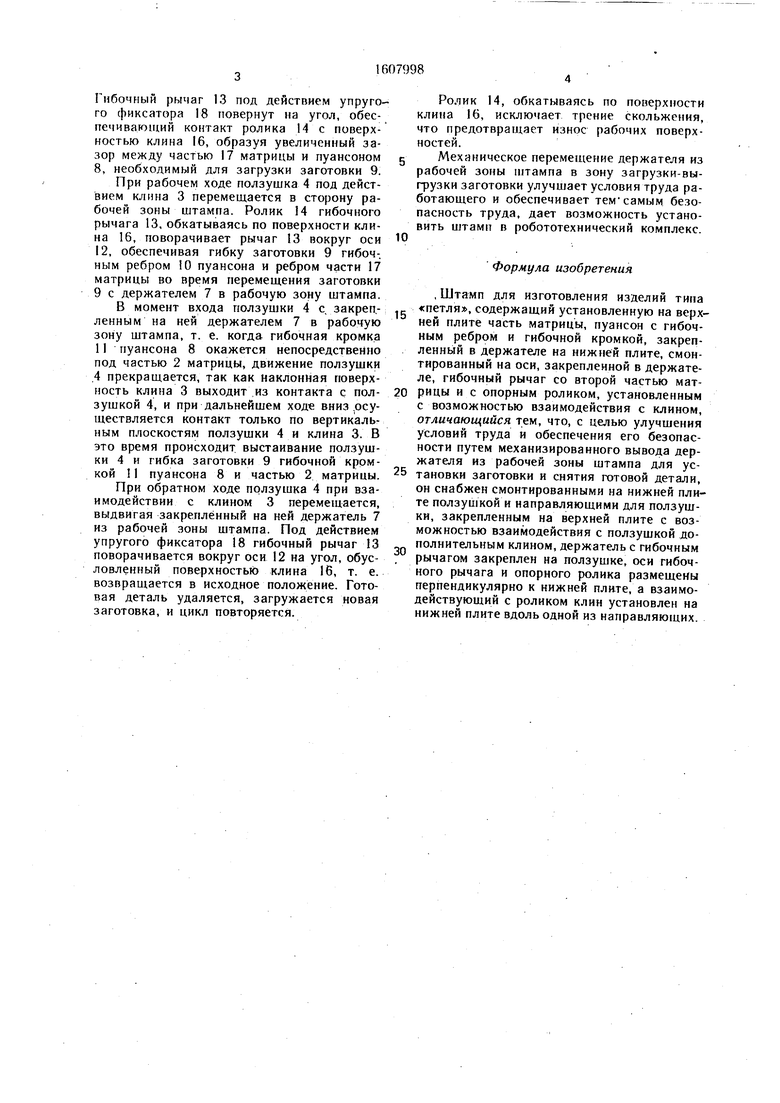
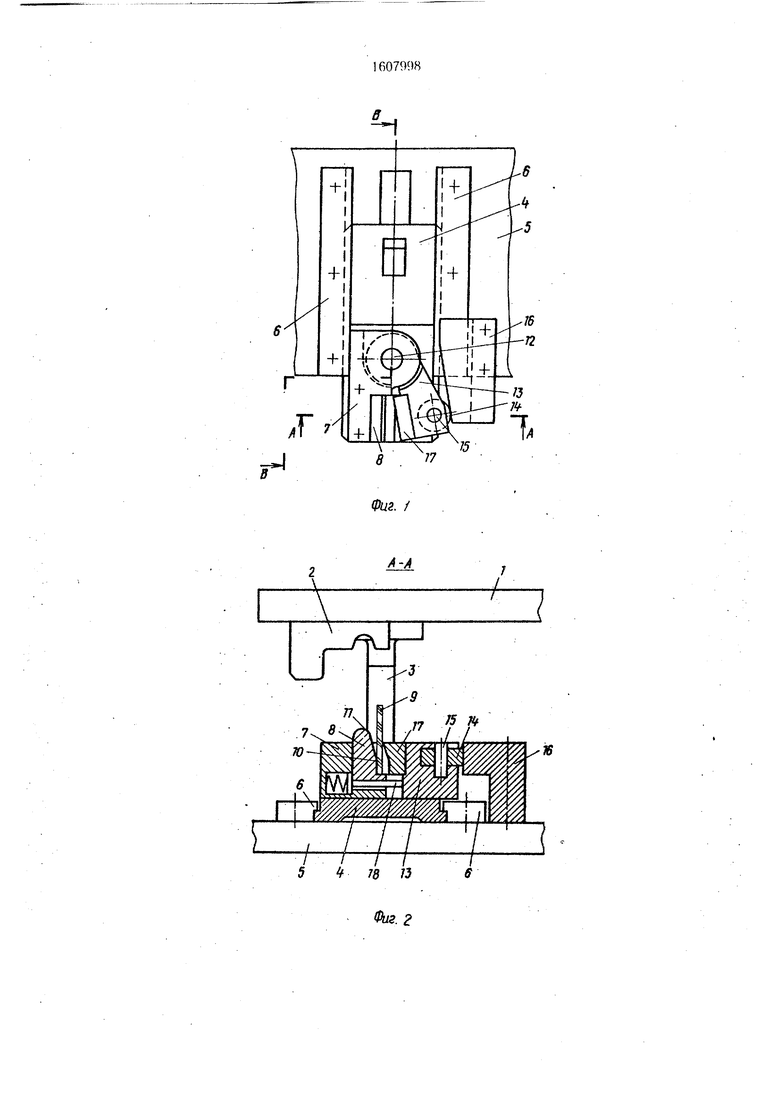
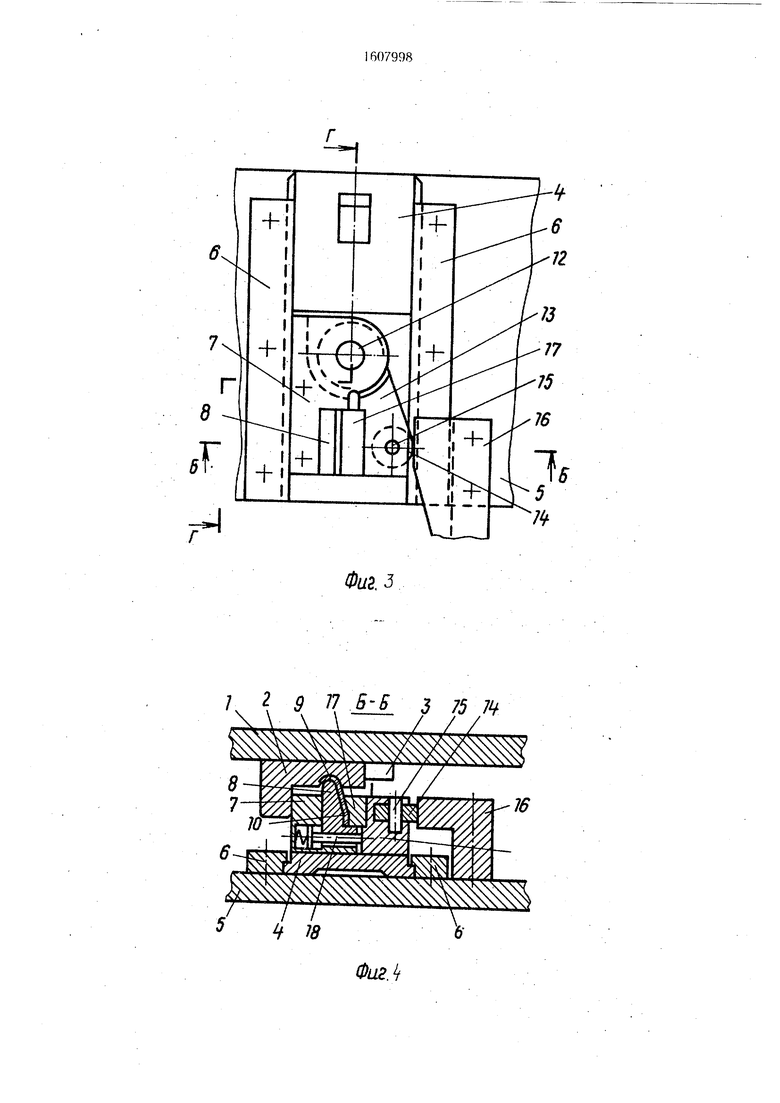
На фиг. I изображен штамп, вид снизу; на фиг. 2 - то же, при крайнем верхнем положении ползуна пресса, сечение А-А на фиг. I; на фиг. 3 - штамп при крайнем нижнем положении ползуна пресса, вид снизу в разрезе; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - штамп при крайнем верхнем положении верхней плиты, сечение В-В на фиг. I; на фиг. 6 - штамп при крайнем нижнем положении верхней плиты, сечение Г-Г на фиг. 3.
, Штамп содержит подвижную верхнюю плиту 1. на которой закреплены часть 2
матрицы и клин 3, двигающийся вдоль па-: за ползушки 4, установленной на нижней плите 5 с возможностью перемещения между направляющими планками 6. На ползушке 4 закреплен держатель 7, на котором установлен пуансон 8 с опорной площадкой для заготовки 9, гибочным ребром 10 и гибочйой кромкой 11. На установленной в держателе 7 оси 12 закреплен одноплечий гибочный рычаг 13, имеющий опорный ролик 14, установленный на оси 15 и взаимодействующий с клином 16. Клин 16 установлен параллельно направляющим планкам 6 на ниж- .;1ей плите 5. На гибочном рычаге 13 установлена вторая часть 17 матрицы с вогнутой рабочей поверхностью. Для поджатия гибочного рычага 13 к клину 16 в держателе 7 установлен упругий фиксатор 18.
.Штамп работает следующим образом.
В верхнем положении плиты I ползушка
4 с закрепленным на ней держателем 7
выдвинута за пределы рабочей зоны штампа.
05 О
;с со
00
Гибочный рычаг 13 под действием упругого фиксатора 18 повернут на угол, обеспечивающий контакт ролика 14 с поверхностью клина 16, образуя увеличеиный зазор между частью 17 матрицы и пуансоном 8, необходимый для загрузки заготовки 9.
При рабочем ходе ползушка 4 под действием клина 3 перемещается в сторону рабочей зоны штампа. Ролик 14 гибочного рычага 13, обкатываясь по поверхности клина 16, поворачивает рычаг 13 вокруг оси 12, обеспечивая гибку заготовки 9 гибоч-. ным ребром 10 пуансона и ребром части 17 матрицы во время перемещения заготовки 9 с держателем 7 в рабочую зону штампа.
В момент входа ползушки 4 с. закрепленным на ней держателем 7 в рабочую зону щтампа, т. е. когда гибочная кромка 11 пуансона 8 окажется непосредственно под частью 2 матрицы, движение ползущки .4 прекращается, так как наклонная поверхность клина 3 выходит из контакта с пол- зушкой 4, и при дальнейшем ходе вниз .осуществляется контакт только по вертикальным плоскостям ползушки 4 и клина 3. В это время происходит выстаивание ползушки 4 и гибка заготовки 9 гибочной кромкой II пуансона 8 и частью 2 матрицы.
При обратном ходе ползушка 4 при взаимодействии с клином 3 перемещается, выдвигая закреплённый на ней держатель 7 из рабочей зоны штампа. Под действием упругого фиксатора 18 гибочный рычаг 13 поворачивается вокруг оси 12 на угол, обус- ловленный поверхностью клина 16, т. е. возвращается в исходное положение. Готовая деталь удаляется, загружается новая заготовка, и цикл повторяется.
Ролик 14, обкатываясь по поверхности клина 16, исключает трение скольжения, что предотвращает износ рабочих поверхностей.
Механическое перемещение держателя из рабочей зоны штампа в зону загрузки-выгрузки заготовки улучшает условия труда работающего и обеспечивает тем самым безопасность труда, дает возможность установить штамп в робототехнический комплекс.
Формула изобретения
, Штамп для изготовления изделий типа «петля, содержащий установленную на верхней плите часть матрицы, пуансон с гибочным ребром и гибочной кромкой, закреп- ленньш в держателе на нижней плите, смонтированный на оси, закрепленной в держателе, гибочный рычаг со второй частью матрицы и с опорным роликом, установленным с возможностью взаимодействия с клином, отличающийся тем, что, с целью улучшения условий труда и обеспечения его безопасности путем механизированного вывода держателя из рабочей зоны штампа для установки заготовки и снятия готовой детали, он снабжен смонтированными на нижней плите ползушкой и направляющими для ползушки, закрепленным на верхней плите с возможностью взаимодействия с ползушкой дополнительным клином, держатель с гибочным рычагом закреплен на ползушке, оси гибочного рычага и опорного ролика размещены перпендикулярно к нижней плите, а взаимодействующий с роликом клин установлен на нижней плите вдоль одной из направляющих.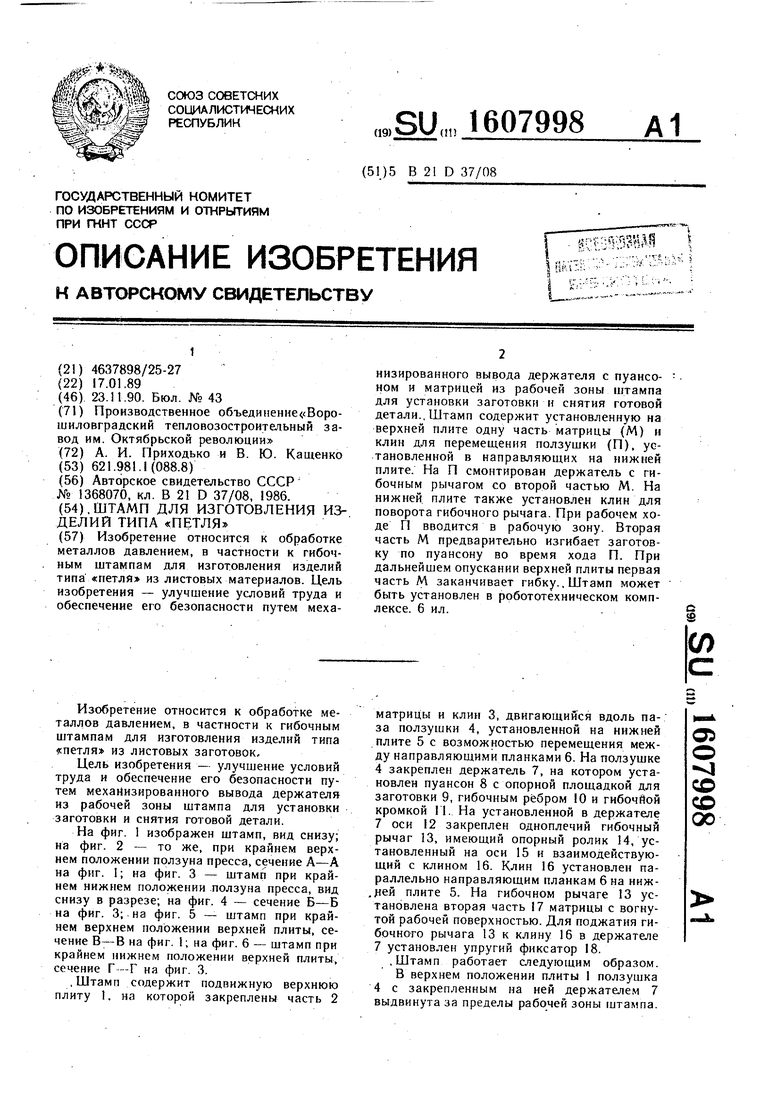
| название | год | авторы | номер документа |
|---|---|---|---|
| Штамп для изготовления изделий типа "петля | 1986 |
|
SU1368070A1 |
| Совмещенный штамп для гибки деталей типа крючок | 1987 |
|
SU1532132A1 |
| Штамп для гибки изделий замкнутой формы | 1986 |
|
SU1398953A1 |
| Штамп для изготовления деталей типа втулок из листового материала | 1986 |
|
SU1433602A1 |
| Штамп для изготовления коушей | 1990 |
|
SU1738436A1 |
| Штамп для получения изделий с краями, отогнутыми внутрь | 1991 |
|
SU1821264A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЗАГОТОВОК ИЗ ПРОФИЛЬНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2565317C2 |
| Гибочный штамп | 1984 |
|
SU1199356A1 |
| Гибочный штамп для изготовления @ -образных деталей из полосового материала | 1980 |
|
SU904832A1 |
| Штамп последовательного действия | 1990 |
|
SU1733167A1 |

Изобретение относится к обработке металлов давлением, в частности к гибочным штампам для изготовления изделий типа "петля" из листовых материалов. Цель изобретения - улучшение условий труда и обеспечение его безопасности путем механизированного вывода держателя с пуансоном и матрицей из рабочей зоны штампа для установки заготовки и снятия готовой детали. Штамп содержит установленную на верхней плите одну часть матрицы /М/ и клин для перемещения ползушки /П/, установленной в направляющих на нижней плите. На П смонтирован держатель с гибочным рычагом со второй частью М. На нижней плите также установлен клин для поворота гибочного рычага. При рабочем ходе П вводится в рабочую зону.Вторая часть М предварительно изгибает заготовку по пуансону во время хода П. При дальнейшем опускании верхней плиты первая часть М заканчивает гибку. Штамп может быть установлен в робототехническом комплексе. 6 ил.
. /./ /
5 /a 73
A-A
Фаг, 5
9 77 6-S 3 75 Щ
.Л.Л. / / /
.
д-в
Фиг. 5
г-Г
| Штамп для изготовления изделий типа "петля | 1986 |
|
SU1368070A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
