Ы
t
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
| Способ непрерывной правки серповидной полосы и устройство для его осуществления | 1988 |
|
SU1662720A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1988 |
|
SU1547901A1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| Линия для пропитки волокнистых длинномерных материалов жидкостью | 1981 |
|
SU1031054A1 |
| Устройство для регулирования натяжения нитей основы на ткацком станке | 1988 |
|
SU1633036A1 |
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
Изобретение относится к средствам регулирования натяжения и может быть использовано на текстильных машинах. Цель - повышение точности регулирования при переходных режимах изменения натяжения материала. Устройство содержит электродвигатели 1 и 2, механически связанные через редукторы 3 и 4 с подающей и тянущей 6 секциями, регулятор 12 натяжения материала, выполненный в виде последовательно включенных сумматора 13, компаратора 14 и интегратора 15. Кроме того, устройство содержит блок 23 оценки натяжения материала, в состав которого входят схемы моделирования отклонения величины натяжения 24 от заданного деформации материала 25 и измерителя 26 натяжения. Благодаря инвариантности предлагаемое устройство повышает точность регулирования при переходных процессах и его можно использовать без дополнительной настройки регулятора 12 натяжения. 2 ил.
OJ
fO
о
Изобретение относится к средствам регулирования натяжения и может быть использовано на текстильных машинах.
Цель изобретения - повышение точно- сти регулирования при переходных режимах изменения натяжения материала.
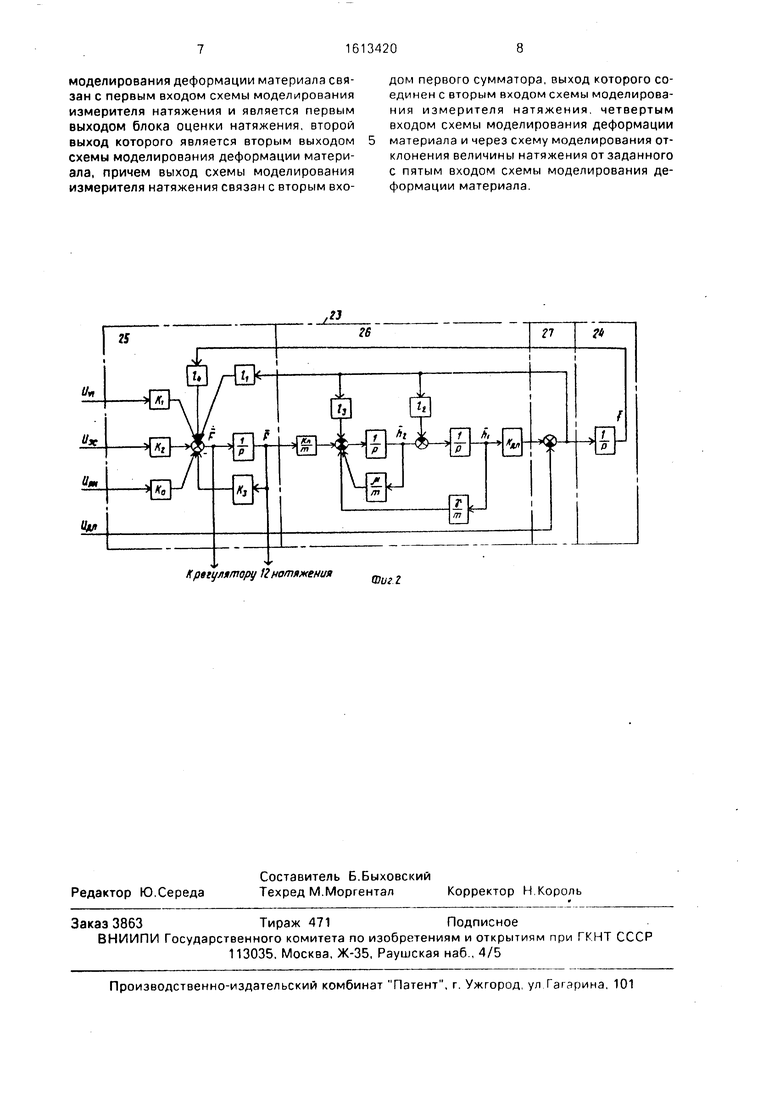
На фиг.1 изображена структурная схема предлагаемого устройства; на фиг.2 - структурная схема блока оценки натяжения.
Устройство содержит приводы, выполненные в виде электродвигателей 1 и 2, механически связанных соответственно через редукторы 3 и 4 с подающей 5 и тянущей 6 секциями, датчиками 7 и 8 частоты вращения приводов и электрически - с блоками 9 и 10 управления приводами, задатчик 11 частоты вращения приводов, подключенный к входам блоков 9 и 10 управления приводами, другие входы которых подключены соответственно к датчикам 7 и 8 частоты вращения, регулятор 12 натяжения, выполненный в виде последовательно включенных сумматора 13, компаратора 14 и интегратора 15, выход которого подключен к входу блока 10 управления приводом, задатчик 16 натяжения материала, подключенный к входу сумматора 13. Устройство содержит также измеритель 17 натяжения в виде подвижного ролика 18, расположенного в петле, образованной тканью 19 и направляющими роликами 20, и связанного с натяжным элементом 21 и датчиком 22 перемещения ролика 18. Ролик 18 имеет возможность перемещения под действием силы натяжения ткани 19. В состав устройства входит блок 23 оценки натяжения, выполненный в виде последовательно включенных схем моделирования отклонения величины натяжения от заданного 24, деформации 25 материала, измерителя 26 натяжения и сумматора 27, причем блок 23 оценки натяжения имеет четыре входа, которые подключены соответственно к датчику 7 частоты вращения привода подающей секции, выходу регулятора 12 натяжения, задатчику 11 частоты вращения приводов и датчику 22 измерителя 17 натяжения, и два выхода, которые подключены соответственно к входам сумматора 13 регулятора 12 натяжения. Схема 25 моделирования деформации материала отражает процесс деформации материала при перемотке и для случая упругой деформации соответствует дифференциальному управлению в прира- щениях переменных
h - - КзР2 -KlUvl + K2U3c -t- K2UpH + f .
где Fj - натяжение ткани;
Uvi, Use. UpH- выходные сигналы соответственно датчика 7 и задатчика 11 частоты
0
5 0 55
вращения приводов и регулятора 12 натяжения;
f K/iFi + V + Fy- возмущающее воздействие;
FI - натяжение материала в предыдущей секции поточной линии;
V - рассогласование линейных скоростей секций 5 и 6, обусловленное разбросом передаточных отношений редукторов 3 и 4 и возможным проскальзыванием материала в секциях;
Fy- приращение натяжения, обусловленное деформацией усадки;
5
0
5
0
5
0
Ki RiE
Кз
KflciiL20 V20
Kc2R2E
к
Vio
L20 L20
где К - коэффициенты передачи, зависящие от параметров;
RI, R2 - радиусы валов подающей и тянущей 5 и 6 секций;
Е - приведенный модуль упругости материала 19;
L20 - заправочная длина материала между подающей и тянущей 5 и 6 секциями;
И, 12 - передаточные отношения редукторов 3 и 4;
Vio, V20 - линейные скорости подачи и выпуска материала в установившемся режиме;
Кс2- коэффициент передачи блока 10 уп- равления приводом. Схема 24, моделирующая возмущение в предлагаемом устройстве, соответствует уравнению
f -|p(K4Fi -(-V-(-Fy)0.
Схема моделирования измерения изме- рите.ля 17 соответствует уравнению fhi h2;
Кп
ib2 ,,-f
m
F2,
где hi - перемещение ролика 18;
у- жесткость пружины, Н/м; /I - коэффициент демпфирования, Нс/м;
Кп- коэффициент передачи петли, образованной материалом 19 в измерителе 17;
m - масса подвижных элементов конструкции подвески ролика 18, приведенная к ролику.
Выходной сигнал сумматора 27 блока 23 оценки соответствует урав2;1ению
U27 Кдп ( hi - hi ) идп - Удп ,
где Удн, Одп- соответственно выходной сигнал измерителя 17 и его оценка.
Динамика блока 23 оценки натяжения соответствует системе уравнений 2 -КзР-г -KiUvi+ K2U3C+ K2UpH-liMh -h,) + f;
hi h2-l2Kfln(hi-hi); h2 +
Kn
mm m
XF -1зКдп(Б1 -hi ); f -UKAn(hi-hi) ,
где F2, iii, h2, f - оценки, соответствующие переменным;
Кдп- коэффициент передачи датчика 22 перемещения;
li - М- коэффициенты обратных связей Выходной сигнал сумматора 13 формируют в виде
S Сх1+х2, где Xi-Fz-F2;
FZ const - выходной сигнал задатчика 16 натяжения;
С - постоянный коэффициент. Выходной сигнал компаратора 14 удовлетворяет уравнению
Uy UoSlgnS, Uo const.
Выходной сигнал интегратора 15 формируют в виде
UpH 1/TiUy. где TI - постоянная интегрирования.
Выбор параметров Do и С производят из условия существован.ия скользящего режима,
Mm , , ,.
Устройство работает следующим обра- зом.
Задатчиком 11 натяжения материала устанавливают заданное значение натяжения FZ материала (аналогично устанавливают заданное натяжение между остальными секциями поточной линии), задатчиком 11 частоты вращения приводов устанавливают заданное значение скорости линии. При этом происходит разгон электродвигателей 1 и 2 подающей тянущей,в результате чего материал 19 непрерывно поступает в поточную линию, где, проходя последовательно от одной секции к другой, подвергается технологической обработке.
Блок 23 оценки натяжения на основе входных сигналов непрерывно восстанавливает переменные F2, hi, h2, f и их производные в виде соответствующих оценок. При изменении параметров объекта в ограниченном диапазоне относительно пара- метров блока 23 оценки натяжения соответствие оценок физическим переменным обеспечивают выбором коэффициентов h - l4.юбратной связи. Выходные сигналы р2 и р2 блока 23 оценки натяжения поступают на входы сумматора 13 регулятора 12 натяжения. Сумматор 13 формирует сигнал S, который вызывает переключение компаратора 14. Выходной сигнал компаратора 14 принимает значения +Uo или -Uo в зависимости от знака сигнала S сумматора 13. Разрывный выходной сигна.л компаратора 14 усредняется интегратором 15 и в виде непрерывного сигнала поступает на входы блока 10 управления приводом тянущей секции 6 и блока 23 оценки натяжения. В результате происходит такое изменение скорости электродвигателя 2. при котором обеспечивается компенсация ошибок по натяжению и его производной. В замкнутой системе возникает скользящий режим, при котором выходной сигнал сумматора 13 становится близким к нулю, т.е. S Cxi+X2 Схнх1 0. Следовательно, динамика изменения ошибки по натяжению от некоторого начального значения соответствует монотонному процессу с заданной постоянной времени и не зависит от параметров объекта и внешних возмущений. В установившемся режиме фактическое натяжение равно заданному, так как xi(t)Fz (t)-F2{t) 0, t - 00.
Формула изобретения Устройство для регулирования натяжения длинномерного материала в поточной линии, содержащее блоки управления приводами подающей и тянущей секций, первый и второй входы которых связаны с соответствующими выходами задатчика и датчиков частоты вращения приводов, блок оценки натяжения, содержащий первый сумматор, первый вход которого соединен с выходом датчика натяжения материала, регулятор натяжения, содержащий взаимосвязанные второй сумматор и интегратор, выходом связанный с третьим входом блока управления приводом тянущей секции и первым входом блока оценки натяжения, второй вход которого соединен с выходом датчика частоты вращения привода подающей секции, а первый и второй выходы - соответственно с первым и вторым входами второго сумматора, третий вход которого связан с выходом задатчика натяжения материала, отличающееся тем. что. с целью повышения точности регулирования при переходных режимах изменения натяжения материала, блок оценки натяжения дополнительно содержит схемы моделирования отклонения величины натяжения от заданного, измерителя натяжения и деформации материала, причем первый вход схемы моделирования деформации материала соединен с выходом задатчика частоты вращения приводов, а второй и третий входы являются первым и вторым входами блока оценки натяжения, а первый выход схемы
моделирования деформации материала связан с первым входом схемы моделирования измерителя натяжения и является первым выходом блока оценки натяжения, второй выход которого является вторым выходом схемы моделирования деформации материала, причем выход схемы моделирования измерителя натяжения связан с вторым вхо.г
WJ
Offl
Крщлятору 1Z натяжения .
дом первого сумматора, выход которого соединен с вторым входом схемы моделирования измерителя натяжения, четвертым входом схемы моделирования деформации материала и через схему моделирования отклонения величины натяжения от заданного с пятым входом схемы моделирования деформации материала.
ял
| Устройство для регулирования натяжения ленточного материала | 1987 |
|
SU1537638A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
