fpu2. 1
Изобретение откосится к магнитным грузозахватным устройствам на постоянных магнитах.
Целью изобретения является повышение работоспособности путем неодновременного приложения усилия отрыва к грузу при освобождении захвата.
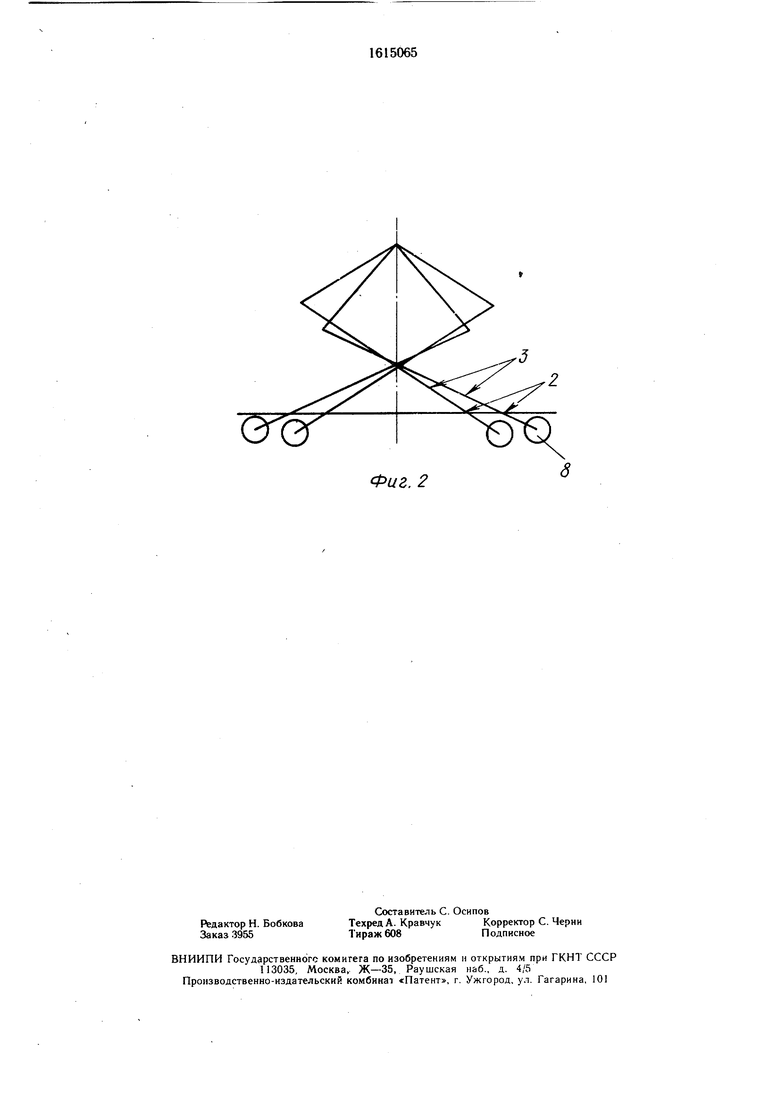
На фиг. 1 изображен магнитный захват, общий вид; на фиг. 2 - схематическое расположение рычагов и тяг при освобождении захвата.
Магнитный захват, навешиваемый на крюк грузоподъемного крана, содержит корпус 1 с размеш.енными в нем постоянными магнитами, две пары двуплечих, соединенных
от магнитов. Вследствие того, что каждый рычаг 3 выполнен с отдельным шарниром 2, а расстояние между шарнирами 2 одной пары рычагов 3, расположенных по одну 5 сторону корпуса 1, не равно расстоянию между шарнирами 2 другой пары рычагов 3, расположенных по другую сторону корпуса 1, первыми во взаимодействие с поверхностью груза 4 вступают ролики 8 той пары ры- чагов 3, расстояние между шарнирами 2 1 которой меньше. Поэтому усилие отрыва определяемого полным весом устройства прикладывается с одной стороны корпуса 1. При дальнейшем движении ползуна 6 вверх
с корпусом , поср«™„--;;а-рЙй;оГ 2: ,5 га°„ - к™ /.г:о.°:ггг™е л ь„1; Гз е; -.. р- сенными шарнирами 2, причем расстояние
между шарнирами 2 одной пары рычагов
расположенных по одну сторону корпуса 1,иольшие плечи рычагов 3 опускаются я
,п-L
гов соединены тягами 5 с ползуном 6, шарнирно соединенным с корпусом 1 с воз- можностью ограниченного вертикального пе- ремешения.25
Ограничение вертикального перемещения
вГ„Генн1:, Т„™„Г; вП:лГГыря с Р Н„жн„е „.,е.„ ,,.L.:, снаа« „
cSSoi одТГз,:, I ГрТ1Г .а -ГТмТ
„а раз,рро,„, J ш.;;Г:1Га SL зГреГеГнГоТя.ГГ; „ГнГ
ОСИ одной пары рычагов расположены на расстоянии, большем расстояния между
г::гт::г. -г гг - р - - еГ--rs
.ерх„о,ь 7руза 4 L отр™ ИГ
переносят к месту загрузки и опускают на поверхность очередного груза. Ползун 6 опускается в крайнее нижнее положение, большие плечи рычагов 3 опускаются, а малые плечи рычагов 3 с роликами 8 приподнимаются над поверхностью груза 4 Штырь фиксатора 7 вставляют в сквозное отверстие, после чего захват готов к дальнейшей работе.
Формула изобретения
1S J ...v uj,,ivj . LLJ ILJlpO 1.рГ1| „атора 7 вынимают и при последующем подъеме ползун 6 движется вверх, увлекая за собой тяги 5. Рычаги 3 при этом пово-.. р- иольшие плечи рычагов 3 опускаются я
,п-L
переносят к месту загрузки и опускают на поверхность очередного груза. Ползун 6 опускается в крайнее нижнее положение, большие плечи рычагов 3 опускаются, а малые плечи рычагов 3 с роликами 8 приподнимаются над поверхностью груза 4 Штырь фиксатора 7 вставляют в сквозное отверстие, после чего захват готов к дальнейшей работе.
Формула изобретения
ШГ
Фиг. 2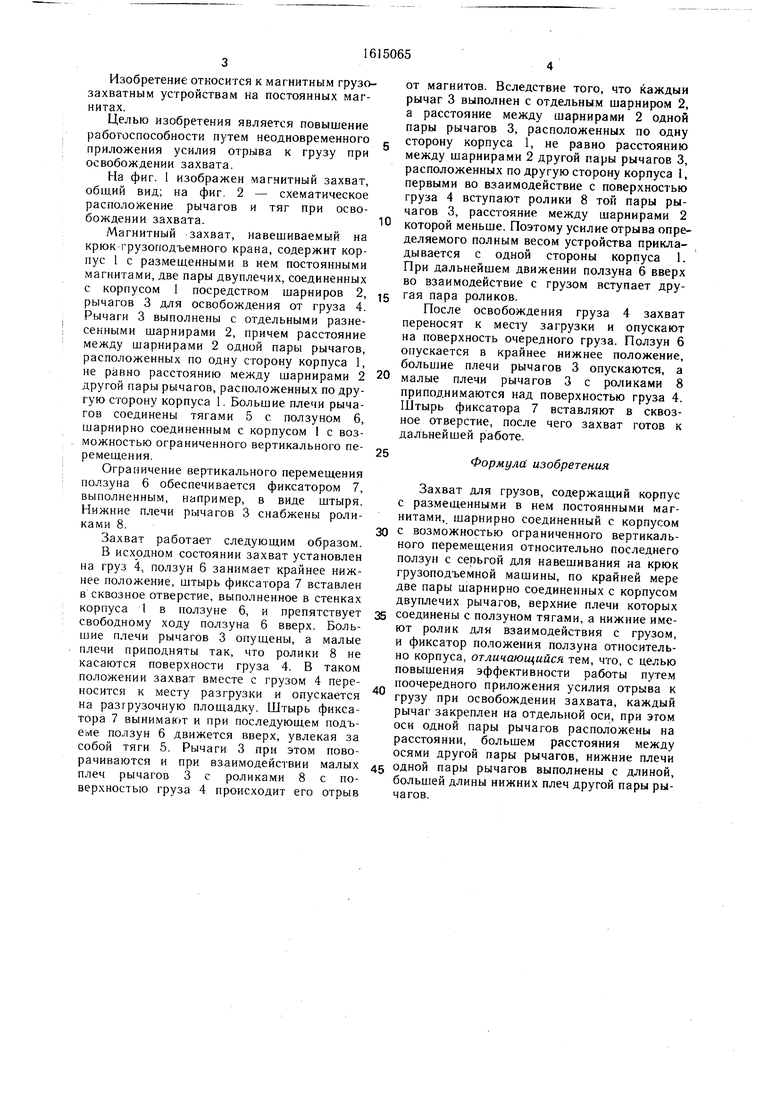
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1989 |
|
SU1705220A1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Грузозахватное устройство | 1989 |
|
SU1622275A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2029724C1 |
| Устройство для захвата груза | 1985 |
|
SU1271814A1 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Грузозахватное устройство | 1990 |
|
SU1776624A1 |
Изобретение относится к магнитным грузозахватным устройствам. Цель изобретения - повышение работоспособности путем неодновременного приложения усилия отрыва к грузу при освобождении захвата. Захват содержит корпус 1 с постоянными магнитами, двуплечие рычаги 3 с роликами 8, тяги 5, ползун 6 и фиксатор 7 положения ползуна 6 относительно корпуса 1. Груз 4 перемещают производят при зафиксированном ползуне 6. Для освобождения захвата снимают штырь фиксатора 7. При подъеме захвата ролики 8 отрывают груз 4 от магнита. Причем, ролики начинают контактировать с грузом в разное время. 2 ил.
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
