Изобретение относится к подъемно- транспортному оборудованию, в частности к магнитным грузозахватным устройствам.
Цель изобретения - упрощение конструкции и повышение надежности,
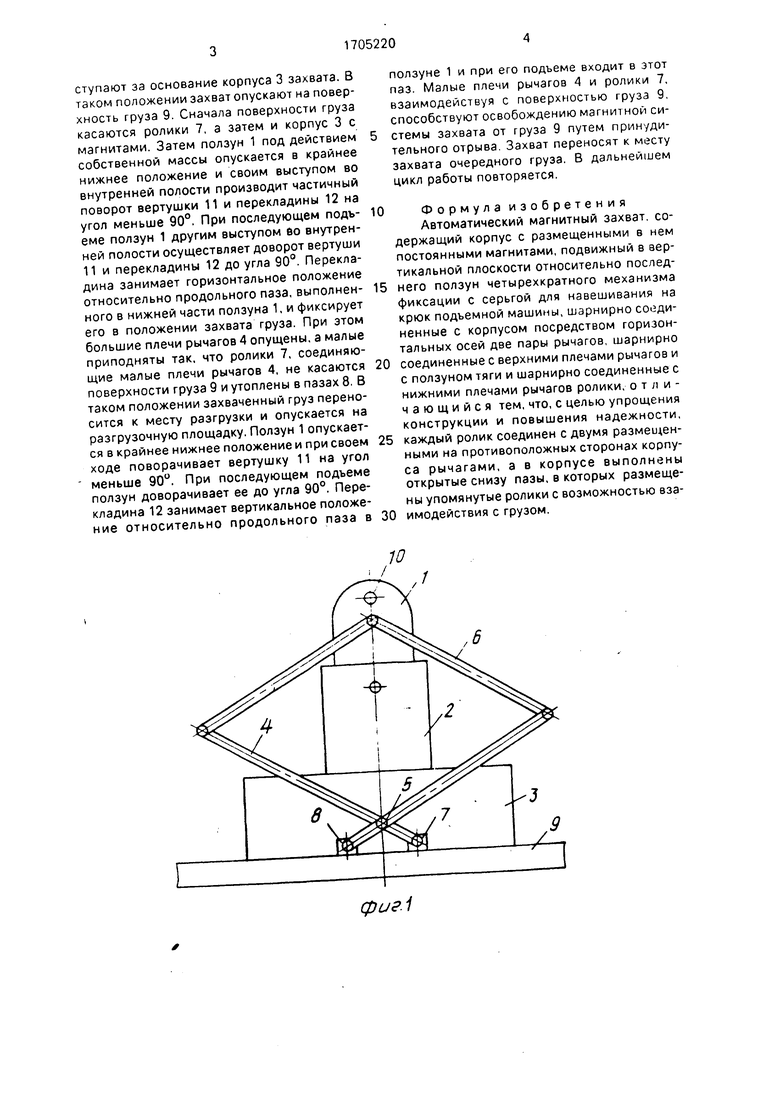
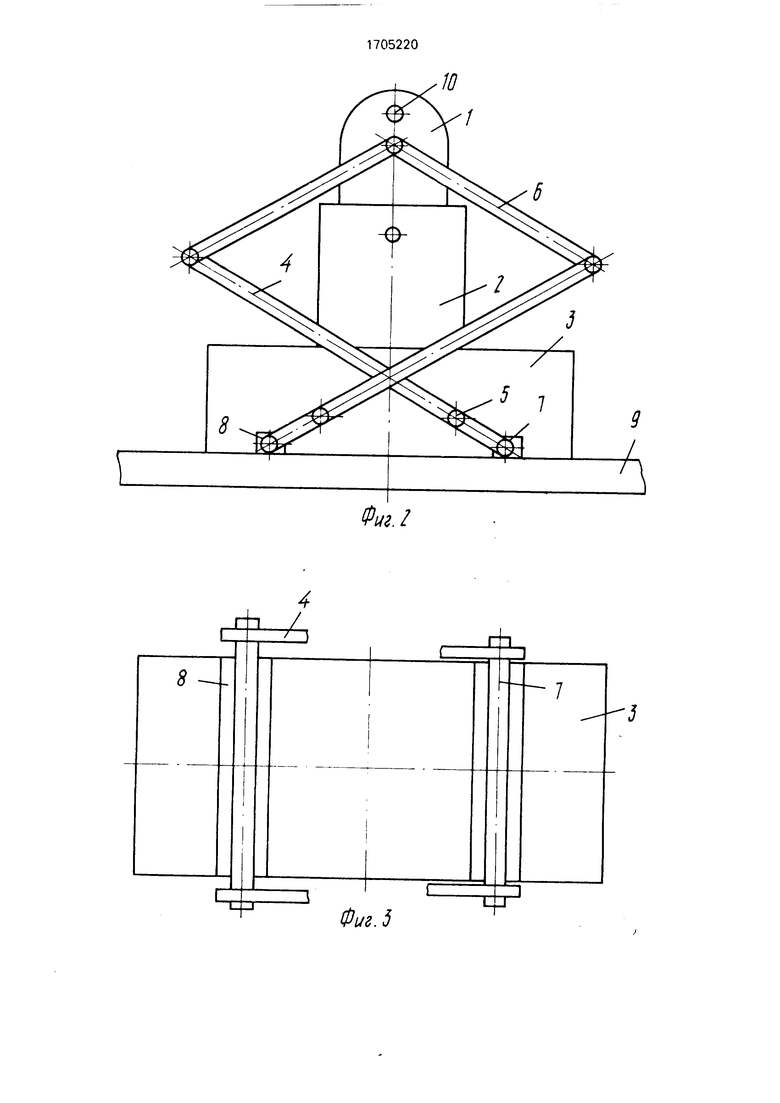
На фиг.1 изображен автоматический магнитный захват, общий вид (с совмещенной осью крепления рычагов): на фиг.2 - то же, с разнесенными осями крепления рычагов; на фиг.З - то же, вид снизу; на фиг.4 - механизм фиксации рычагов.
Автоматический магнитный захват содержит навешиваемый на крюк крана ползун 1 четырехкратного механизма фиксации рычагов, размещенный с возможностью вертикального перемещения в основании 2, прикрепленном к корпусу 3. в котором размещены неподвижные постоянные магниты, две пары двуплечих рычагов 4, шарнирно соединенных с корпусом 3 посредством общей оси бис тягами 6. которые шарнирно соединены с ползуном 1 и большими плечами рычагом 4, ролики 7, размещенные в выполненных в корпусе 3 пазах 8 и шарнирно соединяющих малые плечи каждой пары рычагов 4, закрепленных симметрично на противоположных сторонах корпуса 3. Ролики 7 имеют возможность взаимодействия при повороте рычагов с грузом 9.
Захваты навешиваются на крюк крана при помощи серьги 10.
Механизм фиксации рычагов 4 от поворота кроме основания 2, и ползуна 1. выполненного с фигурным пазом во внутренней полости, включает вертушку 11 квадратного сечения и перекладину 12. которые закреплены на общей оси 13, установленной горизонтально в стенках основания 2 с возможностью вращения.
Захват работает следующим образом.
В исходном положении перекладина 12 механизма фиксации расположена вертикально, а ползун 1 находится в крайнем верхнем положении. При этом ролики 7, соединяющие меньшие плечи рычагов, выел
с
ступают за основание корпуса 3 захвата. В таком положении захват опускают на поверхность груза 9. Сначала поверхности груза касаются ролики 7, а затем и корпус 3 с магнитами. Затем ползун 1 под действием собственной массы опускается в крайнее нижнее положение и своим выступом во внутренней полости производит частичный поворот вертушки 11 и перекладины 12 на угол меньше 90°. При последующем подъеме ползун 1 другим выступом во внутренней полости осуществляет доворот вертуши 11 и перекладины 12 до угла 90°. Перекладина занимает горизонтальное положение относительно продольного паза, выполненного в нижней части ползуна 1. и фиксирует его в положении захвата груза. При этом большие плечи рычагов 4 опущены, а малые приподняты так, что ролики 7, соединяющие малые плечи рычагов 4, не касаются поверхности груза 9 и утоплены в пазах 8, В таком положении захваченный груз переносится к месту разгрузки и опускается на разгрузочную площадку. Ползун 1 опускается в крайнее нижнее положение и при своем ходе поворачивает вертушку 11 на угол меньше 90°. При последующем подъеме ползун доворачивает ее до угла 90°. Перекладина 12 занимает вертикальное положение относительно продольного паза в
ползуне 1 и при его подъеме входит в этот паз. Малые плечи рычагов 4 и ролики 7, взаимодействуя с поверхностью груза 9, способствуют освобождению магнитной си- стемы захвата от груза 9 путем принудительного отрыва. Захват переносят к месту захвата очередного груза. В дальнейшем цикл работы повторяется.
Формула изобретения
Автоматический магнитный захват, содержащий корпус с размещенными в нем постоянными магнитами, подвижный в вертикальной плоскости относительно последнего ползун четырехкратного механизма фиксации с серьгой для навешивания на крюк подъемной машины, шарнирно соединенные с корпусом посредством горизонтальных осей две пары рычагов, шарнирно
соединенные с верхними плечами рычагов и с ползуном тяги и шарнирно соединенные с нижними плечами рычагов ролики, отличающийся тем, что, с целью упрощения конструкции и повышения надежности,
каждый ролик соединен с двумя размещенными на противоположных сторонах корпуса рычагами, а в корпусе выполнены открытые снизу пазы, в которых размещены упомянутые ролики с возможностью взаимодействия с грузом.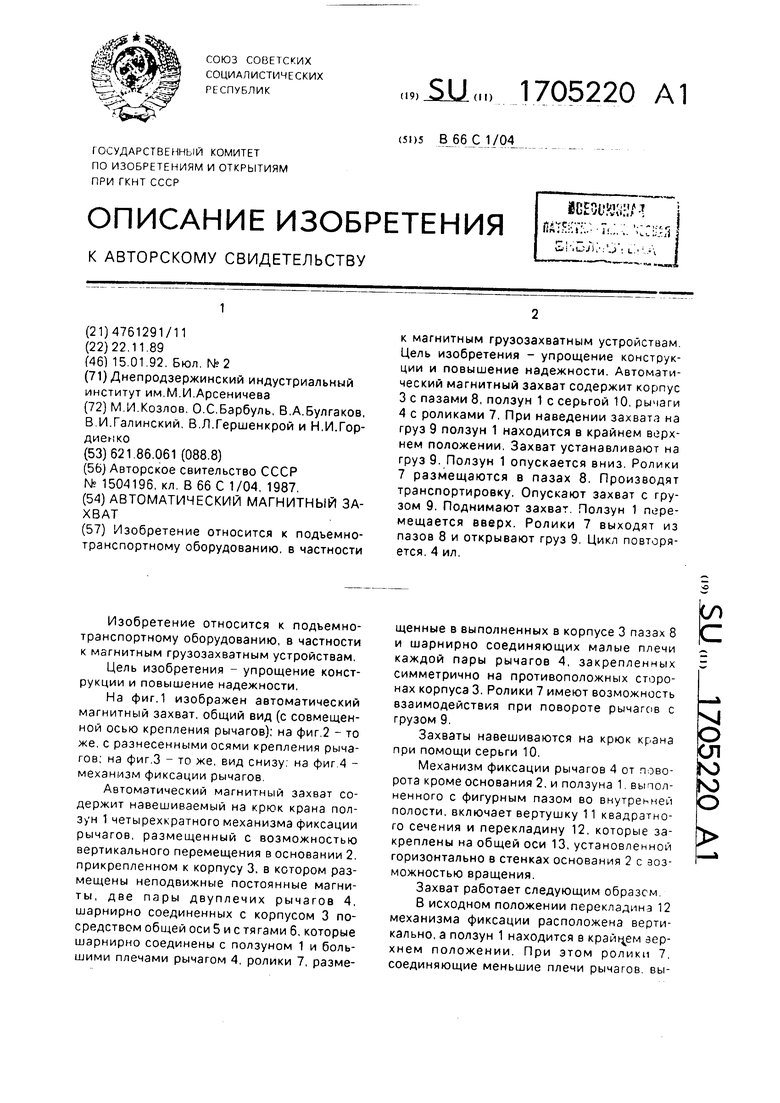
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Захват для грузов | 1988 |
|
SU1615065A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1977 |
|
SU691378A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Грузозахватное магнитное устройство | 1978 |
|
SU897692A1 |
| Устройство для автоматического захвата и транспортировки длинномерных осесимметричных деталей | 2020 |
|
RU2756450C1 |
Изобретение относится к подьемно- транспортному оборудованию, в частности к магнитным грузозахватным устройствам. Цель изобретения - упрощение конструкции и повышение надежности. Автоматический магнитный захват содержит корпус 3 с пазами 8, ползун 1 с серьгой 10, рычаги 4 с роликами 7. При наведении захвата на груз 9 ползун 1 находится в крайнем верхнем положении. Захват устанавливают на груз 9. Ползун 1 опускается вниз. Ролики 7 размещаются в пазах 8, Производят транспортировку. Опускают захват с грузом 9. Поднимают захват. Ползун 1 перемещается вверх. Ролики 7 выходят из пазов 8 и открывают груз 9. Цикл повторяется. 4 ил.
фигА
Фиг. I
Фиг. 5
w
ФигЛ
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
