3. 8
(Л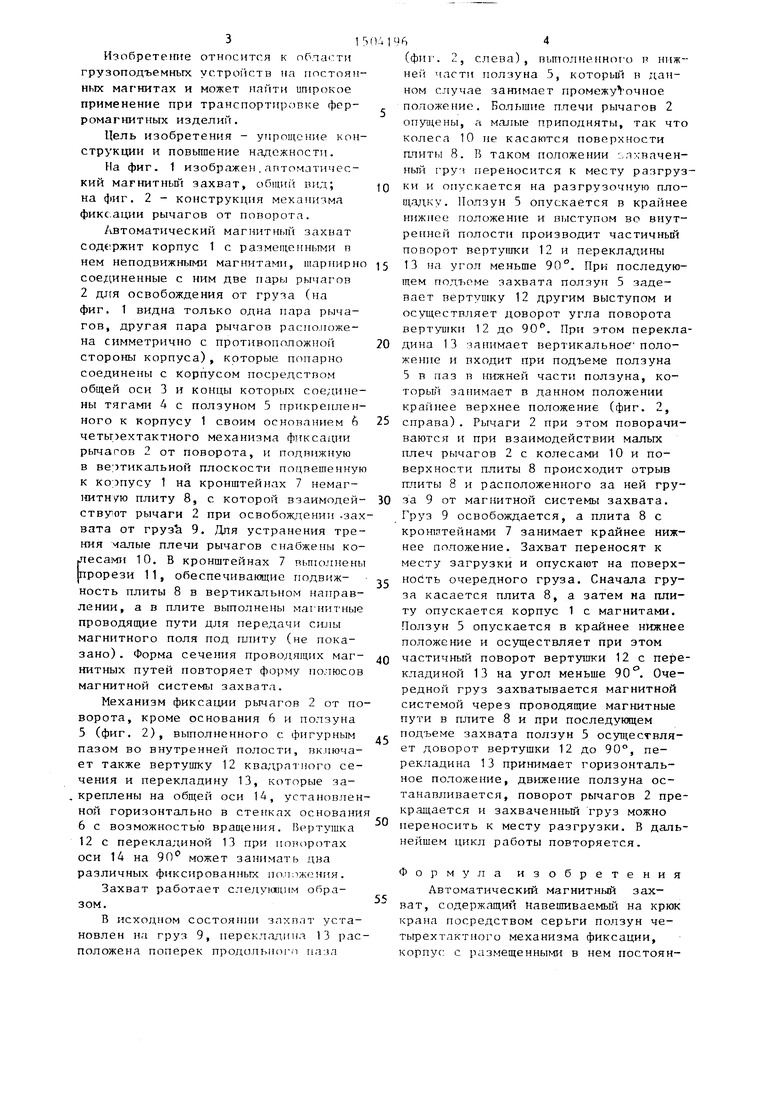
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Автоматический магнитный захват | 1989 |
|
SU1705220A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1973 |
|
SU366145A1 |
| Захват для грузов | 1988 |
|
SU1615065A1 |
| Автоматический захват для транспортировки штучных грузов | 1980 |
|
SU872431A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Автоматический магнитный захват | 1982 |
|
SU1051029A1 |
| Грузозахватное устройство | 1989 |
|
SU1687554A1 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
Изобретение относится к грузоподъемным устройствам на постоянных магнитах. Цель изобретения - упрощение конструкции и повышение надежности работы. Захват содержит корпус 1 с неподвижными постоянными магнитами, шарнирно соединенные с корпусом рычаги, концы которых соединены тягами 4 с ползуном 5 четырехтактного механизма фиксации рычагов от поворота, и подвижную в вертикальной плоскости плиту 8, с которой взаимодействуют рычаги при освобождении захвата от груза. 2 ил.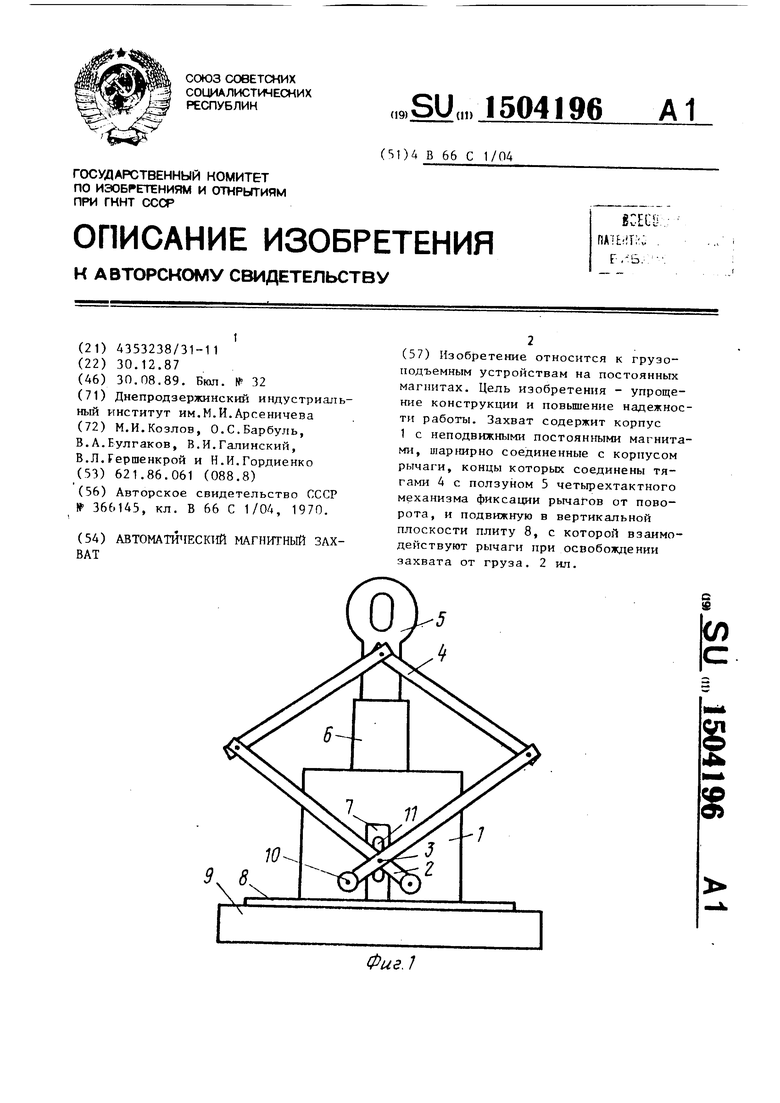
Фиг.1
Изобрете1П1е относится к области грузоподъемных VCTPOI ICTB на постоянных магнитах и может найти ишрокое применение при транспортировке феромагнитных изделий.
Цель изобретения - упрощение конструкции и повышение надежности.
На фиг. 1 изображен.аптоматичес- кий магнитньп захват, o6iimii вид; Q на фиг. 2 - конструкция механизма фиксации рычагов от поворота.
автоматический магнитный захват соде.ржит корпус 1 с размещенными п нем неподвижными магнитами, шарнирно -15 соединенные с ним две пары рычагов 2 для освобождения от груза (на фиг. 1 видна только одна пара рычагов, другая пара рычагов расположена симметрично с противоположной 20 стороны корпуса), которые попарно соединены с корпусом посредством общей оси 3 и концы которых соединены тягами А с ползуном 5 прикрепленного к корпусу 1 своим основанием 6 25 четьпехтактного механизма фиксации рычагов 2 от поворота, и подвижную в ве:5тикальной плоскости поцвешенную к корпусу 1 на кронштейнах 7 немагнитную плиту 8, с которой взаимодей- 30 ствуют рычаги 2 при освобождении -захвата от груз а 9. Для устранения трения малые плечи рычагов снабжены ко- iecaiMn 10. В кронштейнах 7 пьяюлнены рорези 11, обеспечивающие подвиж- с ность плиты 8 в вертикальном направлении, а в плите выполнены магнитные проводящие пути для передачи силы магнитного поля под плиту (не показано) . Форма сечения проводящих маг- Q нитных путей повторяет форму полюсов магнитной системы захвата.
Механизм фиксации рычагов 2 от поворота, кроме основания 6 и ползуна
5(фиг. 2), выполненного с фигурным дс пазом во внутренней полости, включает также вертушку 12 квадратного сечения и перекладину 13, которые закреплены на общей оси 14, установленной горизонтально в стенках основания
6с возможностью вращения. Вертушка 12 с перекладиной 13 при 11опор(5тах оси 14 на 90 может занимать два различных фиксированных положения.
Захват работает следующим образом.
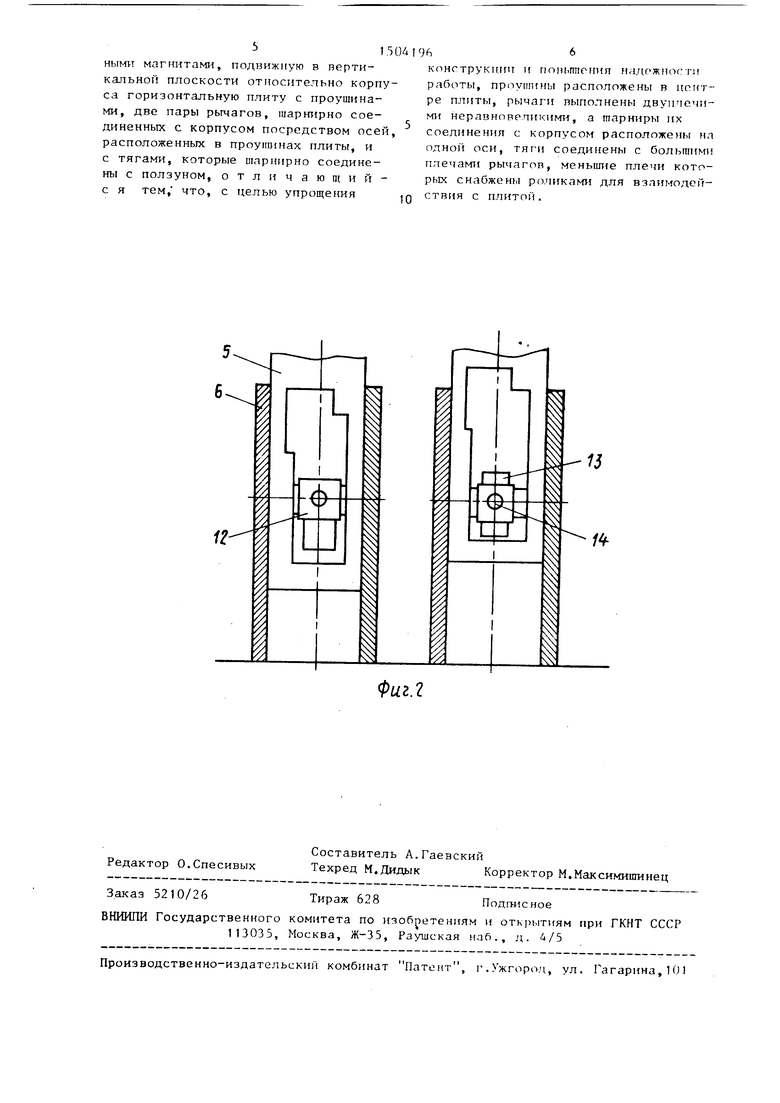
В исходном состоянии захпат установлен на груз 9, иерекл;1диил 13 расположена поперек продально|-п паза
50
(фиг. 2, слева), выполненногч) У нижней части ползуна 5, которьп в данном случае занимает промежуУочное положение. Большие плечи рычагов 2 опуп;ены, а малые приподняты, так что колеса 10 не касаются поверхности плиты 8. В таком положении :,пхваченный груч переносится к месту разгрузки и опускается на разгрузочную пло- ща;т,ку. Ползун 5 опускается в KpaiiHee нижнее положение и выступом во внутренней полости производит частичный поворот вертушки 12 и перекладины 13 на угол меньше 90°. При последующем подъеме захвата ползун 5 задевает вертушку 12 другим выступом и осуществляет доворот угла поворота вертушки 12 до 90. При этом перекладина 13 занимает вертикальное положение и входит при подъеме ползуна 5 в паз в нижней части ползуна, который занимает в данном положении Kpainiee верхнее положение (фиг. 2, справа). Рычаги 2 при этом поворачиваются и при взаимодействии малых плеч рычагов 2 с колесами 10 и поверхности плиты 8 происходит отрыв плиты 8 и расположенного за ней груза 9 от магнитной системы захвата. Груз 9 освобождается, а плита 8 с кронштейнами 7 занимает крайнее нижнее положение. Захват переносят к месту загрузки и опускают на поверхность очередного груза. Сначала груза касается плита
а затем на пли
ту опускается корпус 1 с магнитами. Ползун 5 опускается в крайнее нижнее положение и осуществляет при этом частичньБ поворот вертушки 12 с перекладиной 13 на угол меньше 90°. Очередной груз захватывается магнитной системой через проводящие магнитные пути в плите 8 и при последующем подъеме захвата ползун 5 осуществляет доворот вертушки 12 до 90°, перекладина 13 принимает горизонтальное положение, движение ползуна останавливается, поворот рычагов 2 прекращается и захваченньй груз можно переносить к месту разгрузки. В дальнейшем цикл работы повторяется.
Формула изобретения
Автоматический магнитный захват, содержащий Навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус: с размещенными в нем постоян51.50Д
ными магнитами, подвижную в вертикальной плоскости относительно корпуса горизонтальную плиту с проушинами, две пары рычагов, шарнирно соединенных с корпусом посредством осей, расположенных в проуишнах плиты, и с тягами, которые шлрнирно соединены с ползуном, отличающий- с я тем, что, с целью упрощения
Редактор О.Спесивых
Составитель А.Гаевский
Техред М.Дидык Корректор М.Максимишинец
Заказ 5210/26
Тираж 628
ВНИИПИ Государственного комитета по изоб оетениям и отк1)ытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская иаб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
10
(96
конструкции и пош.тюггил надржности работы, проушины расположены в ионт- ре плиты, рычаги выполнены двуплечими неравновеликими, а гаарниры их соединения с корпусом расположены на одной оси, тяги соединены с болыпими плечами рычагов, меныш{е плечи которых снабжены ро.тнгками для взаимодействия с плитой.
Фиг.2
Подписное
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 0 |
|
SU366145A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
