1
(21)4619146/27-11
(22)13.12.88
(46) 23.12.90. Бюл, « 47
(71)Научно-производственное объединение Складскик систем
(72)А.ФЛСоновалов, В.А.Марголин, Г.П.Фомекко, Б.А.Рощин и Ю,М.Ку11ша- рев
(53) 621.869(088.8)
(56)Авторское свидетельство СССР № 606806, кл. В 66 F 11/00,l976. (34) ТЕЛЕСКШИЧЕСКАЯ КОЛОННА КРАНА- ШТАБЕЛЕРА
(57)Изобретение относится к про- iыпшeннoмy транспорту, в частности к подъемно-транспортным машинам, а именно к телескопическим подъемным
механизмам, используемым преимущественно в краках-штабелерах. Цель изобретения - уменьшение металлоемкости. Телескопическая колонна со-,, держит неподвижную секцию 1 с выемками 2, подвижную секцию 3 с по меньшей мере одним двуплечим рычагом 5j одно плечо которого снабжено роликом, и грузоподъемник с ка- натоблочньп- механизмом перемещения. Грузоподъемник снабжен вертикальной направляющей, состоящей на прямолинейного участка со скосами на про т ивоположных концах, с которой взаимодействует ролик, установлен- ньй на другом плече двуплечего рычага. 7 ил.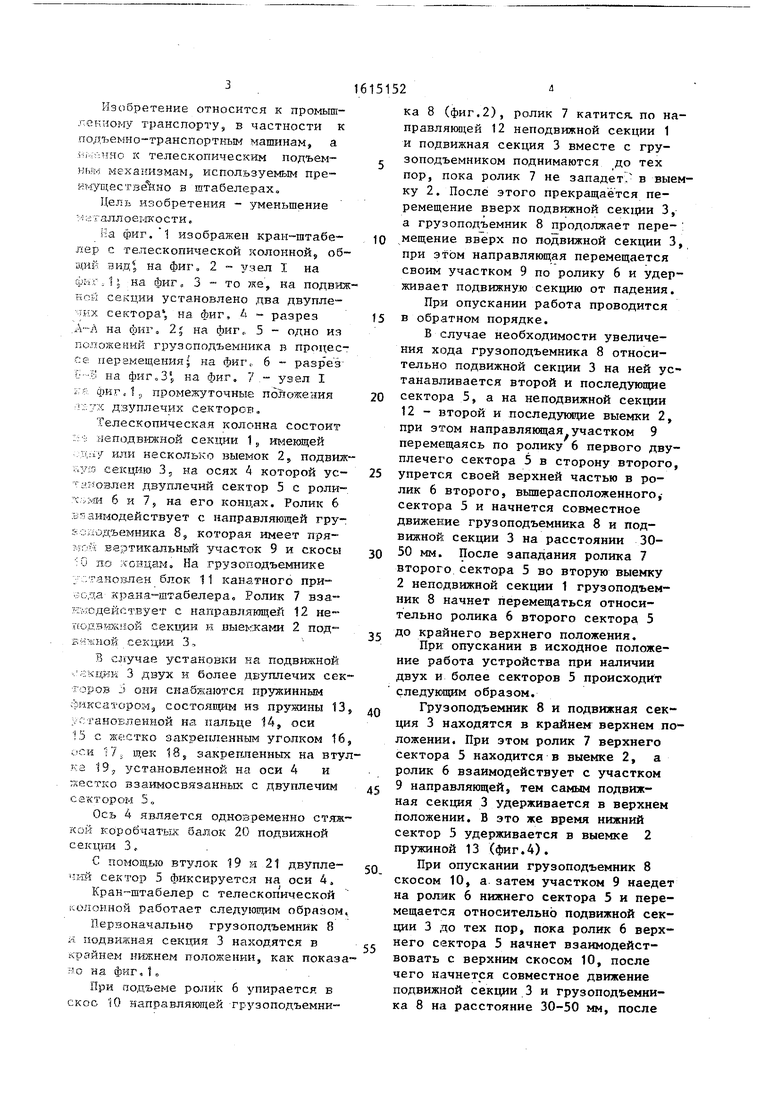
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-штабелер | 1982 |
|
SU1055696A1 |
| КРАН-ШТАБЕЛЕР | 1969 |
|
SU251794A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Телескопическая стрела грузоподъемного крана | 1991 |
|
SU1794874A1 |
| Устройство контроля наличия груза на грузозахватном органе крана-штабелера | 1979 |
|
SU867873A1 |
| КОМПЛЕКТОВОЧНЫЙ КРАН —ШТАБЕЛЕР | 1974 |
|
SU380105A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Высотный кран-штабелер | 1979 |
|
SU844518A1 |

Изобретение относится к промышленному транспорту, в частности к подъемно-транспортным машинам, а именно к телескопическим подъемным механизмам, используемым преимущественно в кранах-штабелерах. Цель изобретения - уменьшение металлоемкости. Телескопическая колонна содержит неподвижную секцию 1 с выемками 2, подвижную секцию 3 с по меньшей мере одним двуплечим рычагом 5, одно плечо которого снабжено роликом, и грузоподъемник с канатоблочным механизмом перемещения. Грузоподъемник снабжен вертикальной направляющей, состоящей из прямолинейного участка со скосами на противоположных концах, с которой взаимодействует ролик, установленный на другом плече двуплечего рычага. 5 ил.
тш
ШВКЙ
СД
(КйЬ
(У1
ьо
Фиг. г
Изобретение относится к .пет-тному транспорту, в частности к подъемно-транспортным машинам, а ,v. ,г:ино к телескопическим подъемным механизмам, используемгз1м пре- кмуществеЬно а штабелерах
Цель изобретения - уменьшение Mйлaллoe иcocти,
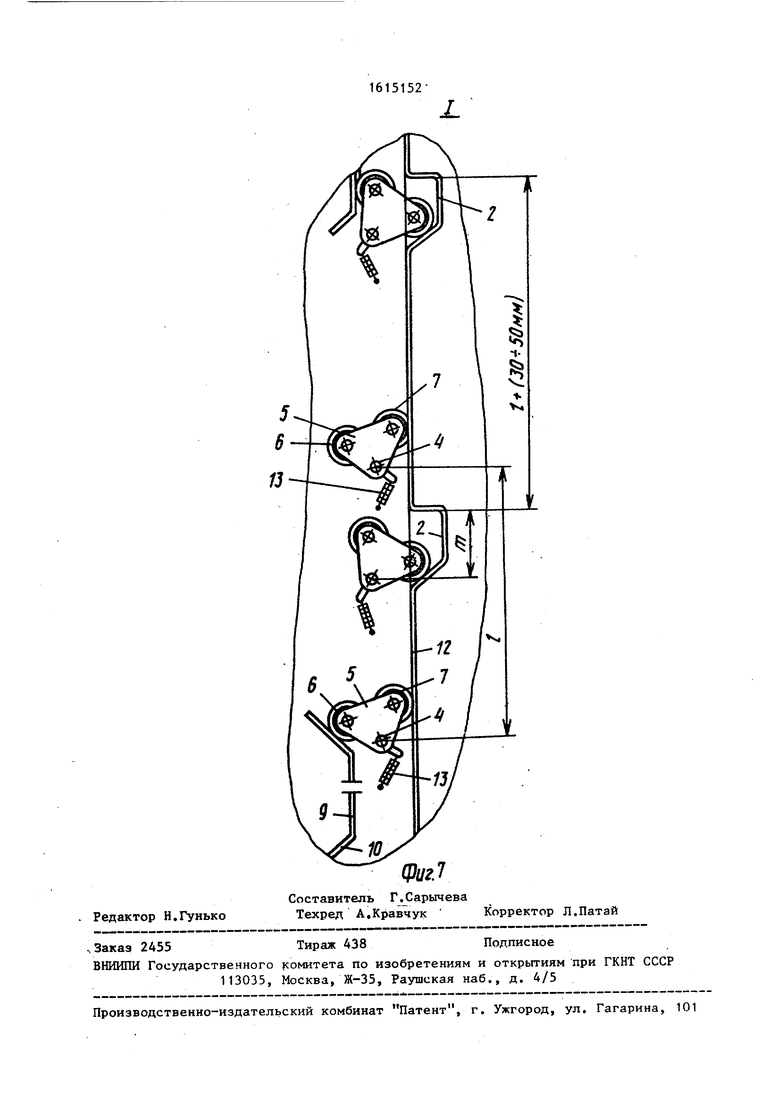
На фиг, 1 изображен кран-штабе- лер с телескопической колонной общий вид на фигч 2 - узел 1 на фиг.И на фиг, 3 - то же, на подви секции установлено два двупле- сектора, на фиг, Ь. - разрез .А-Л на фнго 25 на фиг,, 5 - одно из поло5кений грузоподъемника в процессе перамещения- на фиг 6 - разр ез t---S на фнГоЗ на фиг. 7,- узел I ;- фкг,1,, промежуточные положения х дзупл ечик с ек торов.
Телескопическая колонна состоит ;;; неподвютной секции 1 „ имеющей -Mriy или несколько выемок 2, подвиж 1о, ш секцию 3, на осях 4 которой ус- - ан-овлек двуплечий сектор 5 с роли- 6 и 7, на его концах. Ролик 6 вг аимодействует с направляющей гру- йододъемника 8, которая имеет пря- JoO s вертик.альный участок 9 и скосы по лонцам. На грузоподъемнике ..тановлен блок 11 канатного при- аода крана-штабелера. Ролик 7 вза.™ Емодействует с направляющей 12 не- :с1од:вшкной секции и 2 под- Б секции 3,
В случае установки на подвижной /йкц;«и 3 двух и более двутшечих сек горов J- они снабжаются пружинным фиксатором, состоящим из пружины 13 ;. станоЕленной на пальце 14, оси 15 с жестко закрепленным уголком 16 r/j щек 18 5 закрепленных на втука 19, установленной на оси 4 и secTKo взаимосвязанных с двуплечим сектором 5,
Ось 4 является одновременно стяжкой коробчатых балок 20 подвижной секции 3
С помощью втулок 19 и 21 двупле- чх Гй сектор 5 фиксируется на оси 4.
Кран-штабелер с телескоп ической ;солонной работает следующим образом
Первоначально грузоподъемник 8 ;i подвижная секция 3 находятся в крайнем нижнем положении, как показа но на фиг,I о .
При подъеме ролик 6 упирается в скос 10 направляющей грузоподъемни-
10
15
20
25
30
35
40
45
5
ка 8 (фиг.2), ролик 7 катится, по на- правляюп1ей 12 неподвижной секции 1 и подвижная секция 3 вместе с грузоподъемником поднимаются до тех пор, пока ролик 7 не западет в выемку 2. После этого прекращается перемещение вверх подвижной секции 3, а грузопод емник 8 продолжает пере- : мещение вверх по подвижной секции 3, при этом направляющая перемещается своим участком 9 по ролику 6 и удерживает подвижную секцию от падения. При опускании работа проводится в обратном порядке.
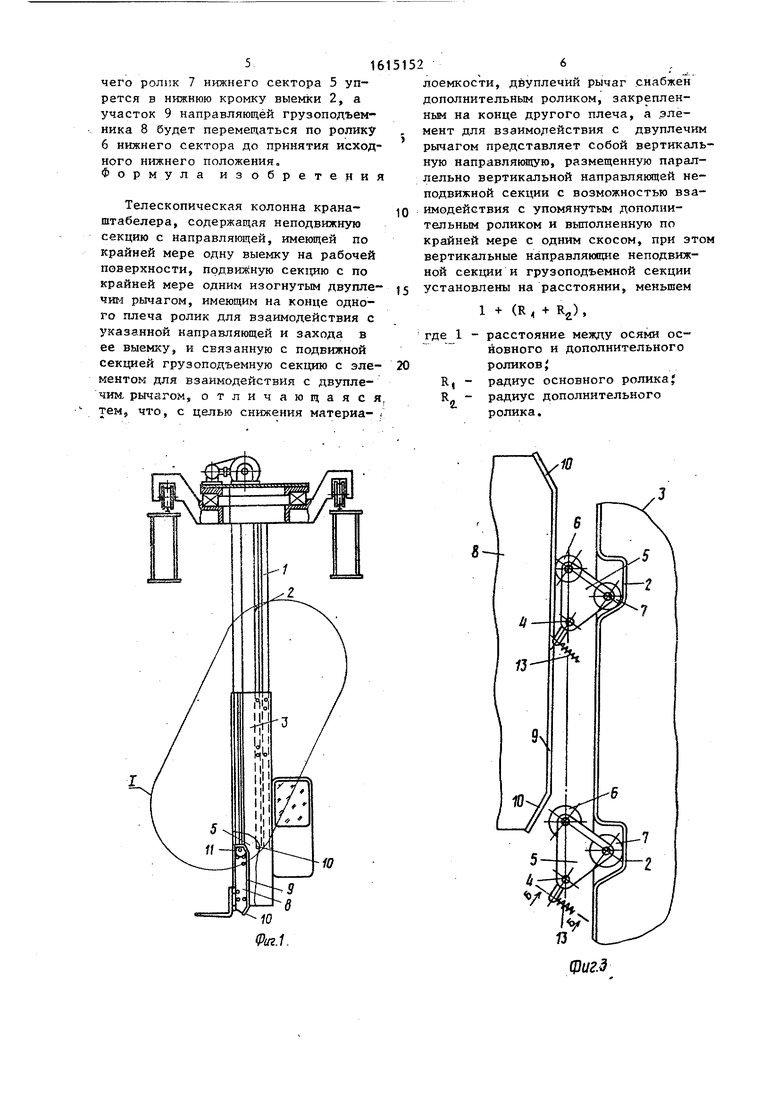
В случае необходимости увеличения хода грузоподъемника 8 относительно подвижной секции 3 на ней устанавливается второй и последующие сектора 5, а на неподвижной секции 12 - второй и последующие выемки 2, при этом направлякщая участком 9 перемещаясь по ролику 6 первого двуплечего сектора 5 в сторону второго, упрется своей верхней частью в ролик 6 второго, вышерасположенного,- сектора 5 и начнется совместное движение грузоподъемника 8 и подвижной секции 3 на расстоянии 30- 50 мм. После западания ролика 7 второго сектора 5 во вторую выемку 2 неподвижной секции 1 грузоподъемник 8 начнет перемещаться относительно ролика 6 второго сектора 5 до крайнего верхнего положения.
При опускании в исходное положение работа устройства при наличии двух и более секторов 5 происходит следующим образом.
Грузоподъемник 8 и подвижная секция 3 находятся в крайнем верхнем положении. При этом ролик 7 верхнего сектора 5 находится в выемке 2, а ролик 6 взаимодействует с участком 9 направляющей, тем самым подвижная секция 3 удерживается в верхнем положении. В это же время нижний сектор 5 удерживается в выемке 2 пружиной 13 (фиг.4).
При опускании грузоподъемник 8 скосом 10, а затем участком 9 наедет на ролик 6 нижнего сектора 5 и перемещается относительно подвижной секции 3 до тех пор, пока ролик 6 верхнего сектора 5 начнет взаимодействовать с верхним скосом 10, после чего начнется совместное движение подвижной секции 3 и грузоподъемника 8 на расстояние 30-50 мм, после
чего ролик 7 нижнего сектора 5 упрется в нижнюю кромку выемки 2, а участок 9 направляющей грузоподъемника 8 будет перемещаться по ролику б нижнего сектора до принятия исходного нижнего положения, Фор м у ла изобретения
Телескопическая колонна крана- штабелера, содержащая неподвижную секцию с направляющей, имеющей по крайней мере одну выемку на рабочей поверхности, прдвижнзпо секцию с по крайней мере одним изогнутым двуплечим рычагом, имеющим на конце одного плеча ролик для взаимодействия с указанной направляющей и захода в ее выемку, и связанную с подвижной секцией грузоподъемную секцию с элементом для взаимодействия с двуплечим, рычагом, отличающаяся тем, что, с целью снижения материа-
-10
лоемкости, двуплечий рычаг снабжен дополнительным роликом, закреплен- ньм на конце другого плеча, а .элемент для взаимодействия с двуплечим
рычагом представляет собой вертикальную направляняцую, размещенную параллельно вертикальной направляющей неподвижной секции с возможностью взаимодействия с упомянутым дополнительным роликом и выполненную по крайней мере с одним скосом, при этом вертикальные направляюпше неподвижной секции и грузоподъемной секции
установлены на расстоянии, меньшем
1 + (R 4 + R) ,
где 1 - расстояние между осями осйовного и дополнительного роликовJ
R, - радиус основного роликаJ R - радиус дополнительного ролика.
13
/-/
18
Шиг.6
